(54) АВТОМАТ ДЛЯ СОРТИРОВКИ НАРУЖНЫХ ПОДШИПНИКОВЫХ КОЛЕЦ ПО ДИАМЕТРУ ЖЕЛОБА
1
Изобретение относится к машиностроению и может быть использовано для сортировки наружных колец радиально-упорных шариковых подшипников.
По основному авт. св. № 648289 известен автомат, содержащий измерительную станцию с приемным гнездом, имеюшим неподвижные упоры и арретированные подвижные щупы, загрузочное устройство, механизм поштучной подачи колец, сортировочное устройство, электроблок для преобразования сигналов измерительной станции в команды сортировочного устройства и кулачковый командоаппарат, управляющий узлами и механизмами автомата. Механизм поштучной подачи колец установлен эксцентрично оси симметрии приемного гнезда и соосно прямой, проходящей через центр окружности, описанной вокруг неподвижных упоров и арретированных подвижных щупов I.
Однако на известном автомате можно сортировать только наружные кольца радиальных шарикоподщипников с полным профилем желоба, так как два базовых упора и два измерительных щупа однозначно
фиксируют такие кольца по отнощению к плоскости расположения упоров и щупов. Кроме того, на этом автомате нельзя сортировать наружные кольца радиально-упорных щариковых подшипников, так как про. филь их дорожки качения не дает возможности однозначно фиксировать такие кольца относительно плоскости расположения упоров и щупов.
Цель изобретения- расширение технологических возможностей автомата (автоматическая сортировка наружных колец радиально-упорных щариковых подщипников).
Указанная цель достигается тем, что автомат имеет неподвижный кольцевой упор, в отверстии которого размещены базовые
5 упоры и измерительные щупы, и механизм прижима колец к кольцевому упору, состоящий из приводного резинового ролика, ось вращения которого расположена по отнощению к плоскости упора под углом, отличным от прямого, при этом механизм при20жима установлен с возможностью возвратно-поступательного перемещения от штока арретирования измерительных щупов.
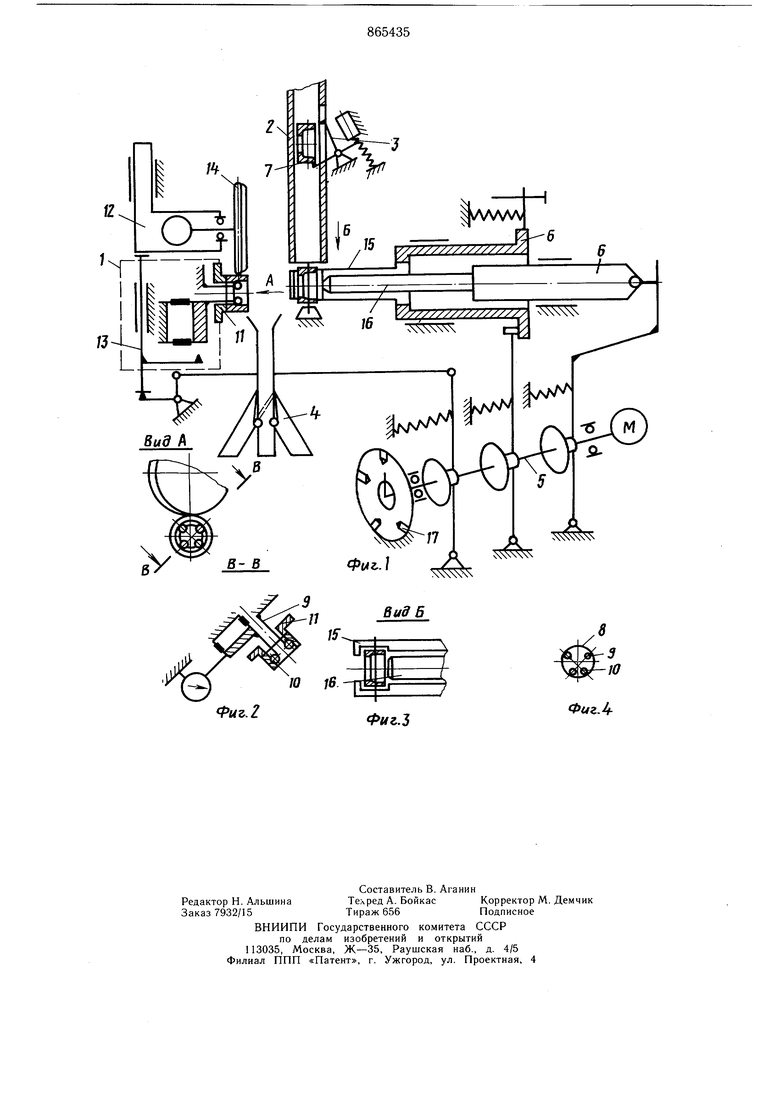
На фиг. 1 изображена схема предлагаемого автомата; на фиг. 2 - вид А на фиг. 1; на фиг. 3 - вид Б на фиг. 1; на фиг. 4 - схематическое расположение неподвижных упоров и арретированных подвижных щупов перед установкой в позицию очередного кольца.
Автомат содержит измерительную станцию 1, загрузочное устройство 4 с электроблоком для преобразования сигналов измерительной станции 1 в команды сортировочного устройства 4, кулачковый командоапиарат 5. Автомат содержит также механизм 6 поштучной подачи колецТв станцию 1, соосный окружности 8, описанной вокруг неподвижных упоров 9 и арретированных подвижных щупов 10. Измерительная станция 1 снабжена неподвижным кольцевым торцовым упором 11, расположенным на требуемом расстоянии от плоскости расположения упоров 9 и щупов 10. Автомат снабжен механизмом 12 прижима кольца 7 к торцовому упору 11, связанным со штоком 13 арретирования подвижных щупов и имеющим приводной резиновый ролик 14, ось вращения которого расположена под углом, отличным от прямого, к плоскости расположения упоров 9 и щупов 10.
Механизм 6 поштучной подачи колец 7 содержит ползун 15 со сквозным окном для установки одного кольца 7 и соосно с ним проходного калибра 16 для предварительного контроля и центрирования колец 7 при подаче их в измерительную станцию 1. Ползун 15 и калибр 16 независимо друг от друга кинематически связаны с кулачками командоаппарата 5.
Автомат работает следующим образом.
Под действием электромагнитного отсекателя 3 из загрузочного устройства 2 кольцо 7 ориентировано (щироким торцом к торцовому упору 11) попадает в сквозное окно ползуна 15 механизма пощтучной подачи. Одним из кулачков командоаппарата 5 подается вперед проходной калибр 16. В начале хода вверх толкателя 13 вводятся в нерабочее положение механизм 12 прижима и измерительные щупы 10. Проходной калибр 16 доходит до измерительной станции 1. Следующий кулачок командоаппарата перемещает ползун 15 с кольцом 7
по калибру 16 в зону измерения. Толкатель 13 идет вниз, сначала опускается механизм 12 прижима, а в конце хода толкателя 13 вводятся в контакт с желобом кольца 7 подвижные щупы 10.
Кольцо 7, расположенное на двух неподвижных упорах 9, вращающимся резиновым роликом 14 прижимается к неподвижному торцовому упору 11. Затем механизм 12 прижима несколько поднимается вверх,
а подвижные щупы 10 продолжают контактировать с желобом кольца. Одним из микропереключателей 17 командоаппарат 5 включает схему измерения электронного блока.
В двух диаметральных сечениях кольца 7
фиксируются размеры диаметра желоба. По сигналу измерительной станции 1 электроблок обрабатывает результаты измерения и выдает управляющий сигнал на сортировочное устройство 4.
Ходом толкателя 13 вверх арретируются подвижные щупы 10. Ходом ползуна 15 вправо кольцо 7 выводится из измерительной станции 1 и падает в сортировочное устройство 4.
Формула изобретения
Автомат для сортировки наружных подшипниковых колец по диаметру желоба по
авт. св. № 648289, отличающийся тем, что, с целью расщирения технологических возможностей, он имеет неподвижный кольцевой упор, в отверстии которого размещены базовые упоры и измерительные щупы, и механизм прижима колец к кольцевому упору, состоящий из приводного резинового ролика, ось вращения которого расположена по отнощению к плоскости упора под углом, отличным от прямого, при этом механизм прижима установлен с возможностью возвратно-поступательного перемещения от штока арретирования измерительных щупов.
Источники информации, принятые во внимание при экспертизе 451- Авторское свидетельство СССР
№ 648289, кл. В 07 С 5/04, 1975.
8
3 10
| название | год | авторы | номер документа |
|---|---|---|---|
| АВТОМАТ ДЛЯ КОНТРОЛЯ ОТВЕРСТИЙ ВНУТРЕННИХ КОЛЕЦ ПОДШИПНИКОВ КАЧЕНИЯ | 1972 |
|
SU328952A1 |
| АВТОМАТ ДЛЯ КОНТРОЛЯ И СОРТИРОВКИ КОЛЕЦ ПОДШИПНИКОВ | 1991 |
|
RU2016673C1 |
| Автомат для сортировки внутренних и наружных колец шариковых радиальных подшипников | 1958 |
|
SU120919A1 |
| Способ сборки радиальных шариковых подшипников и автомат для его осуществления | 1977 |
|
SU717425A1 |
| Устройство для контроля и сортировки уплотнительных колец | 1986 |
|
SU1359008A1 |
| Автомат для сортировки деталей | 1985 |
|
SU1294391A1 |
| Автомат для сортировки подшипников качения по моменту сопротивления вращению | 1987 |
|
SU1506319A1 |
| Автомат для сортировки деталей | 1990 |
|
SU1789311A1 |
| Сортировочное автоматическое устройство для контроля размеров деталей | 1971 |
|
SU540684A1 |
| Автомат для сортировки подшипников качения по моменту сопротивления вращению | 1989 |
|
SU1686329A1 |