Изобретение относится к подшипниковой промышленности и может быть использовано для сортировки подшипников по моменту сопротивления вращению.
Цель изобретения - расширение технологических возможностей автомата.
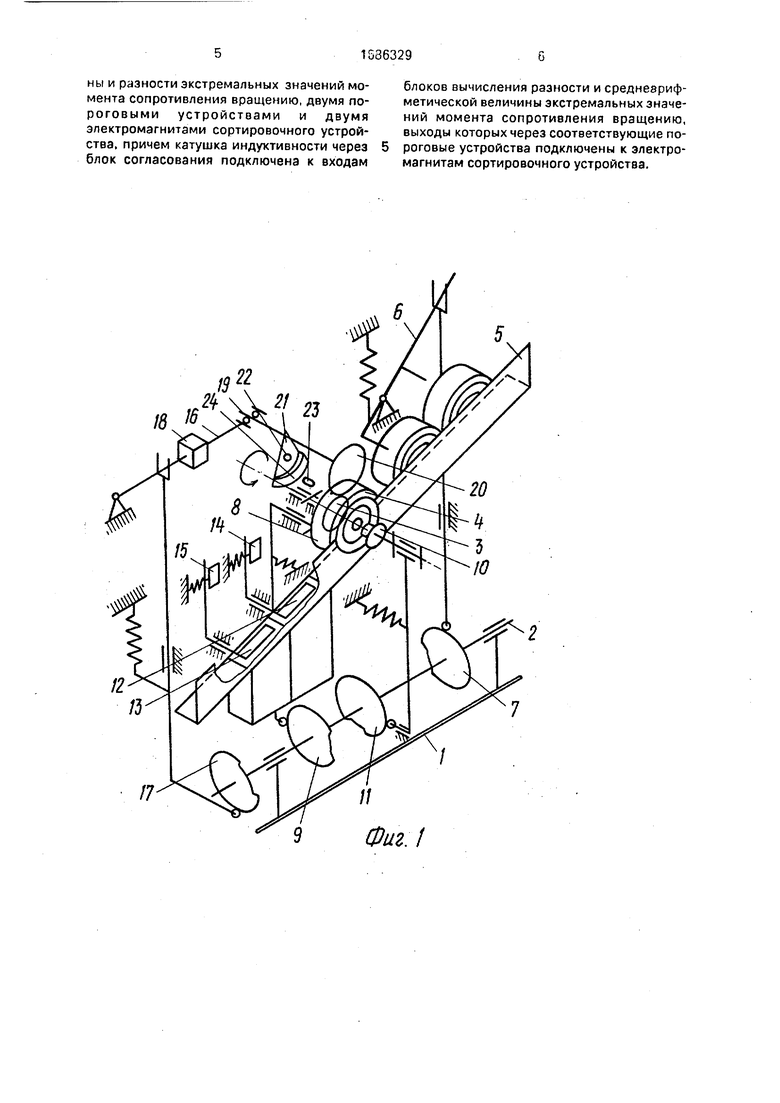
На фиг. 1 представлена функциональная схема; на фиг. 2 - представлен узел взаимодействия флажка маятника с катушкой индуктивности; на фиг. 3 - приведена функциональная схема преобразования сигнала от катушки индуктивности.
Автомат для сортировки подшипников качения по моменту сопротивления вращению содержит станину 1, на которой установлен привод, обеспечивающий вращение кулачкового распределительного вала 2 и планшайбы 3 механизма вращения внутреннего кольца контролируемого подшипника 4. В верхней части наклонного лотка 5 установлен механизм 6 поштучной подачи, взаимодействующий с кулачком 7, а в зоне контроля подшипника 4 имеется ловитель 8, взаимодействующий с кулачком 9 и прижимной грибок 10, установленный с возможностью свободного вращения и принудительного осевого перемещения or кулачка 11. В нижней части гаклониого лотка 5 установлены сортировочные заслонки 12 и 13, приводимые в действие посредством электромагнитов 14 и 15. На рычаге 16, взаимодействующим с кулачком 17, крепятся подвижный груз 18, а при помощи оси 19 - контрольный маятник, состоящий из диска 20 с фрикционным элементом для взаимодействия, с наружным кольцом конгролируемого подшипника 4 и флажка 21 с грузиком 22. На корпусе автомата против рабочего положения флажка 21 маятника неподвижно установлена катушка 23 индуктивности своею осью параллельно оси 19. Рабочая поверхность 24 флажка 21 находится в плоскости, не перпендикулярной к оси катушки 23 индуктивности. Катушка 23 индуктивности через блок 25 согласования подключена к входам блока 26 вычисления разницы и блока 27 вычисления среднеарифметической величины экстремальных значений момента сопротивления вращению, выходы которых через пороговые устройства 28 соединены с соответствующими электромаг- нитами 14 и 15 сортировочного устройства.
Автомат работает следующим образом.
Производят накладку путем установки груза 18, определяющего нагрузку на контролируемый подшипник 4, и установкой грузика 22, определяющего противодействующий момент моменту сопротивления вращению. При вращении распределительного вала 2 от кулачка 7 срабатывает механизм 6 поштучной выдачи подшипника. По наклонному лотку 5 до ловителя 8 скатывается подшипник 4, где от действия кулачка 11 грибок 10, перемещаясь, центрирует и прижимает подшипник 4 внутренним кольцом к вращающейся планшайбе. При этом наружное кольцо подшипника 4 прижимается к подпружиненному ловителю 8, который выполняет дополнительную функцию тормоза наружного кольца при разгоне до рабочей скорости планшайбой 3 внутреннего кольца подшипника 4. От кулачка 17 под действием груза 18 опускается рычаг 16, на конце которого /установлен контрольный маятник, до соприкосновения с наружным кольцом подшипника 4 диска 20. При этом флажок 21 маятника входит в зону взаимодействия с катушкой 23 индуктивности. По-/ еле этого в результате действия кулачка 0 отводится от наружного кольца подшипника 4 ловитель 8. В стадий контроля внутрен- нее кольцо подшипника 4 принудительно вращается планшайбой 3, а наружное кольцо удерживается от вращения противодействующим моментом контрольного маятника, который определяется массой грузика 22 и углом поворота флажка 21 вокруг оси 19 Противодействующий момент контрольного маятника соответствует моменту сопротивления вращению подшипника 4. Поэтому при контроле изменения момента сопротивления вра- щению в подшипнике 4 выражается изменением угла отклонения флажка 21 контрольного маятника, что фиксируется катушкой 23 индуктивности. Регистрация угла отклонения флажка 21 осуществляется при
помощи катушки 23 определением расстояния до рабочей поверхности 24 (см. фиг. 2). При контроле подшипника 4 аналоговый сигнал от катушки 23 индуктивности через блок 25 согласования поступает на вход блоков 26 и 27, в одном из которых вычисляется разница, а в другом среднеарифметическая величина экстремальных значений аналогового сигнала в цикле измерения. Полученные величины в пороговых устройствах 28 сравниваются с предельно-допустимыми соответствующими значениями. Если какая- либо из величин превышает предельно-допустимое значение, то с выхода соответствующего порогового устройства 28 подается команда выключения определенного электромагнита 14 и 15 сортировочного устройства. Определенная сортировочная заслонка открывает ячейку соответствующей сортировочной группы. Если же ни одно из предельно-допустимых значений не превышало, то ни одна из заслонок 14, 15 не открывается. Поэтому по окончании цикла измерения после отвода от подшипника 4 диска 20 контрольного маятника посредством подъема рычага 16 от воздействия кулачка 17 и вывод из зоны лотка 5 грибка 10 от воздействия кулачка 11 подшипник 4 под действием своего веса катится по наклонному лотку 5 и в соответствующую ячейку.
Автомат позволяет рассортировать подшипники с учетом непостоянства моменту сопротивления качению с высокой точностью.
Формула изобретения Автомат для сортировки подшипников качения по моменту сопротивлени вращению, содержащий привод с кулачковым рас- пределительным валом, измерительную станцию с механизмом вращения одного из колец подшипника и маятником, снабженным фрикционным элементом, предназначенным для взаимодействия с другим кольцом подшипника, загрузочный бункер с механизмом поштучной подачи подшипников в измерительную станцию, а также сортировочное устройство, отличающий- с я тем, что, с целью расширения функциональных возможностей и повышения качества рассортировки подшипников, измерительная станция оснащена катушкой индуктивности, установленной неподвижно против флажка маятника на оси, параллельной оси маятника, а рабочая поверхность флажка маятника выполнена не перпендикулярной к оси катушки, автомат также снабжен блоком согласования, блоками вычисления среднеарифметической величины и разности экстремальных значений момента сопротивления вращению, двумя пороговыми устройствами и двумя электромагнитами сортировочного устройства, причем катушка индуктивности через блок согласования подключена к входам
блоков вычисления разности и среднеарифметической величины экстремальных значений момента сопротивления вращению, выходы которых через соответствующие пороговые устройства подключены к электромагнитам сортировочного устройства.


Изобретение относится к подшипниковой промышленности и может быть использовано для сортировки подшипников по моменту сопротивления вращению. Цель изобретения - расширение технологических возможностей автомата. В автомате измерительная станция снабжена чувствительным элементом в виде катушки и несимметричного флажка маятника, определяющим момент сопротивления вращению в подшипнике. К катушке подключены блоки согласования, вычисления разности и среднеарифметической величины экстремальных значений, которые через пороговые устройства соединены с исполнительными органами сортировочного устройства. Автомат позволяет учитывать комплексный показатель состояния подшипника, зависящий от чистоты рабочих поверхностей, состояния смазки. 3 ил. 00 с
/ я
#
19
22
12
17
7
Фиг.1
фиг. 2
фиг.З
| Автомат для сортировки подшипников качения по времени выбега | 1983 |
|
SU1105769A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Автомат для сортировки подшипников качения по моменту сопротивления вращению | 1987 |
|
SU1506319A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
