В известных устройствах для опускания штанги токоприемника троллейбуса нри сходе с контактного провода, принцип действия которых основан на ослаблении нодъемных пружин и опускании штанги под влиянием собственного веса, срабатывание механизма для выключения пружин зависит от угла подъема штанги при сходе ее с провода.
Кроме того, в НИХ не предусмотрено дистанционное управление штангами из кабины водителя.
В предлагаемом устройстве эти недостатки устранены путем применения механизма для выключения пружин, денствуюшего в зависимости от поворота контактной голонки токоприемника. Таким обра.юм, обеспечивается быстрота срабатывапия устройства вне зависимости от положения троллейбуса и вьгсоты подвеса контактного провода.
Отличительной особенностью иредлагае.мого устройства является соединение поворотной контактной головки с трехилечим рычагом, управляющим .механ11змами отключения подъемных пружин, а также }1аличие соленоидного привода д.чя дистанционного управления штанга.ми.
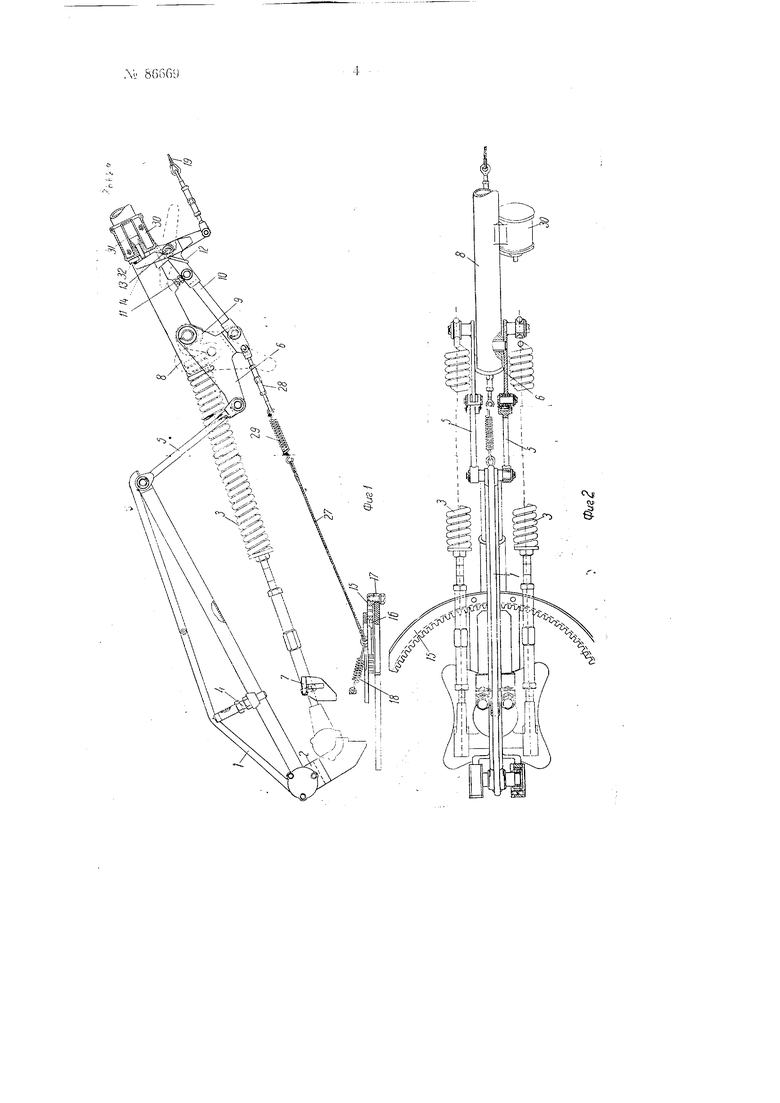
Конструкция И действие оиисываемого устройства поясняются чертежом, где на фиг. 1 и 2 показано предлагаемое устройство сбоку и в плане; на фиг. 3 его датчик.
Устройство СОСТОИТ ИЗ четырех основных узлов: механизма отк.пония И включения пружин, датчика, агрегата фикс1 рования в горизонтальной ПЛОСКОСТИ, соскочившей с контактного провода штанги и механиз.ма для дистанционного управления.
Механизм отключения и включения подъемных иружпн выполнен в виде шпрепгельной балки /, иижиий конец KOTopoii установлен в luaрикоподшииниках, закрепленных на вилке 2, ириваренно к поворотпоГг
; 866G9- 2 колонке штаяги. Главная каретка б механизма укреплена на основа1 ни шгунгн 8 и соединена тягами 5 с балкой J. Кроме этого, механизм енабжеп за: ковой тягой 10 и трехнлечлм рычагом 14.
Верхние концы подъемных пружин о укрен.меиы на главной каретке 6.
В рабочем положеннн штанги главная каретка 6 занирается тяroii 10 и трехнлечим рычагом 14.
Устойчивое иоложение заиираюнхего механизма обеснечнвается сп| ральной нружиной 12, прижимающей шарнир соединения тяги 10 с рычагом 14 к болту //, и наличием обратной стрелы нрогиба, шарнирного соединения, равно: примерно 0,25 мм и регулируемой болтом //.
В момент соп акиваиия итганги с контактного провода датчик н;тангоуловителя поворачивает тросом 19 трехнлечий рычаг 14 вокруг 13 и выводит замковую тягу 10 и трехплечий рычаг 14 нз положения равновесия. При этом указанная система рычагов обеспечивает возможность главно каретке 6 под действием подъемных пружин 3 повериутгся до упора 5л что приводит к резкому уменьшению иатяжеиия под1 емных пружин и опуекаиию штанги под действием собствеиного веса.
Штанга, освобожденная от натяжения нодьемных пружин, опуекаС;С5; до тех пор, пока ширепгеЛУаая ба.ака 1 не упрется болтами 4 в упор 7, приваренный к поворотной колонке штанги. Под амортизируюШ.ИМ действием нодьемиых пружин остановка игганги происходит плавно, без удара.
Величина опускания штанги регулируется поворотом болтов 4.
Включение подъемны.х пружин осуществляется водителем при помогай установочной веревки путем онускания штанги до горизонтально Ч) положения.
При этом главная каретка 6 поворачивается и включает подъемные пружины.
После включения подъемных пружин главная каретка 6 автоматически запирается замковой тягой 10 и трехплечим рычагом 14, обеспечивая возможность установкп штанги на контактный провод.
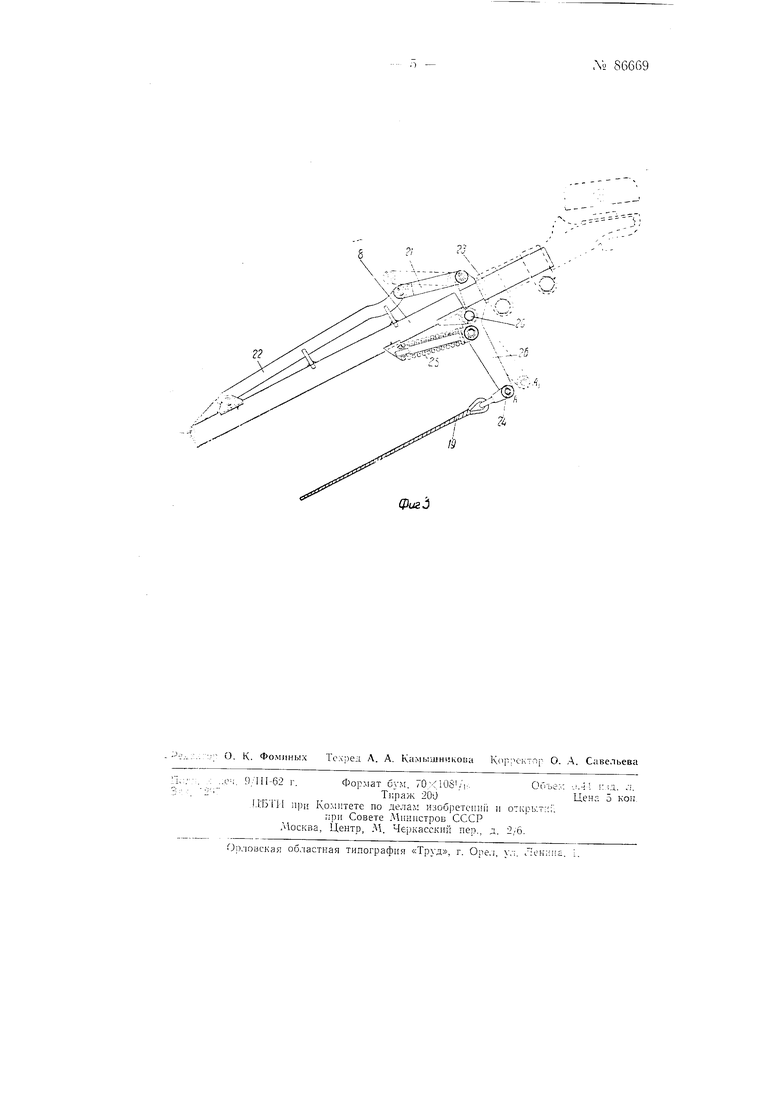
Датчик штангоуловителя (фнг. 3), вызывающий при сходе токоприемника с контактного провода срабатывание всех механизмов, располагается в верхней части штанги. Головка токоприемника, укрепленная на штанге на шарнире 20, поворачивается з пределах, ограниченных с одiioii стороны рычагами 21 и 22, а с другой стороны торцами штаиги 8 и трубки 23.
При иорма.тьпой работе штанги головка токоприемника занимает положение, при котором шарнир 24 находится в точке А.
При соскакивании штанги с контактного провода го;ювка токоприемника под действием пружипы 25 поворачивается вверх, вследствие чего рычаг 26 перемещает шарнир 24 из точки А в точку AI и тросом 19 выводит запирающий механизм главной каретки из состояния равновесия.
Усилие иружины 25 должно быть достаточным для сообщения, при сходе штанги с контактного провода, необходимого вертикального ускорения головке токоприемника и создания импульса для открытия запорного механизма.
При включении подъемных пружин головка штаиги опускается вниз и рычаг 26, освобождая трос 19, обеспечивает возможность запирающему механизму главной каретки установиться в распорное поло-; жение.
Механизм фиксирования в горизонтально . COC vO4I Blliei
с конта тко о провода штанг сосго т 3 неподв жного зубчатого сектора 15 замка 16, враш,аюн1С ося в гор 13октально нлоскост со . Зубчаты - 15 укреплен на кронште11не 17, приваре 1ном к ;е 1одвнжному основани 0 штанги.
При нормаоТьно работе замок 16 нружнно 18 выведе П зацепления. При срабатгз ван И ycTpoiicTBa главная каретка 6 тросо- 27 1всднт в заценленне 16 с зубчаты ч ceKTOpoN 15.
Замок 16, нерел е даюни1нся в нанравляющнх 17, препятствует нри срабатыван( устро 1ства вращенню штанги вокруг вертикальной оси.
Натяжение троса 27 регулгруется стяжко ; 28. Для обеспечения срабатывания .;e. ирн различно: высоте предус.мотрена 1ружина 29.
Дистанционное унравле 1ие нта 1гами осуш:ествляется соленоидным 1р водом, ycтaнoвлe ны на ос овани штанги.
При прохо( тока через соленоид 30 сердечннк 31, толкая трехплечий рычаг 14, выводит тягу 10 и рычаг 14 , состояHiin равновесия, т. е. вызывает срабатывание устройства.
На приборнол дктке водителя устанавл ва отся две кнопк i две си нальные лампочки, в цепь которых введены контакты 32, установленные на корпусе соленондного привода. , нажимая правую кнопку, вызывает срабагь вание устройства право или лево 1 танги, а нри oднoвpe eннo кнопок опускает обе штанги.
Предмет i з о б р е г е н я
1.Устройство для aвтo aт чecкoгo опускания штанг троллейбусного токо1 р емника при соскак ваии1 головк с ко тактного провода, сонровождающегася ослаблеи е. нoдъe Ь x пружин опускан ем 1 танги под действ ел собственного веса, о т л и ч а О ш, е е с я тем, что новоротная контактная го.товка, пр(жимаемая пружиной к проводу, соединена тягой с пoвopoт Ь трехплечнм . управляю цим exaниз oм нoдъe ныx пружин.
2.В устройстве но п. 1 - ipHMe ie i ie солено 1дпого привода для дистанционного унравле1 ия из водителя.
- 3 -Ло 86669
W
21
Фиг
| название | год | авторы | номер документа |
|---|---|---|---|
| Быстродействующее устройство для опускания штанг токоприемников | 1948 |
|
SU82851A1 |
| Токоприемник троллейбуса | 1983 |
|
SU1088962A1 |
| ТОКОСЪЕМНОЕ УСТРОЙСТВО | 2001 |
|
RU2191708C2 |
| Передвижное устройство для вырезки щебня из шпальных ящиков | 1956 |
|
SU106905A1 |
| ТОКОПРИЕМНИК ДЛЯ ТРОЛЛЕЙБУСА | 2018 |
|
RU2690946C1 |
| Штангоуловитель для токоприемников троллейбусов | 1967 |
|
SU422214A1 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО УЛАВЛИВАНИЯ ШТАНГ ТОКОПРИЕМНИКОВ ТРОЛЛЕЙБУСА | 2001 |
|
RU2209143C1 |
| Штанговый токоприемник | 1976 |
|
SU770868A1 |
| ТРОЛЛЕЙБУС С ЧАСТИЧНОЙ НЕЗАВИСИМОСТЬЮ ОТ КОНТАКТНОЙ СЕТИ | 2012 |
|
RU2493027C1 |
| Устройство для автоматического улавливания штанги токоприемника троллейбуса при соскакивании головки с контактного провода | 1989 |
|
SU1735081A1 |