Предлагаемое изобретение относится к области техники, где необходим съем тока подвижными контактами.
Наилучшие условия съема тока с контактного провода были бы достигнуты в том случае, если бы давление в контакте между проводом и головкой токоприемника оставалось во все время движения неизменным. Это может быть в том случае, если контактная подвеска обладает на всем ее протяжении равномерной эластичностью и если контактные провода расположены строго на одной высоте над землей. В действительных условиях выдержать эти требования не удается.
Высота контактных проводов подвергается значительным изменениям под влиянием температуры. Также неизбежны снижения контактных проводов в отдельных пунктах участка при проходе их в искусственных сооружениях. Эластичность контактной подвески при существующих ее конструкциях изменяется нередко в значительных пределах в различных точках пролета. Таким образом, во всех случаях работа токоприемника протекает при постоянных изменениях его высоты, величина и скорость которых определяются конструктивными параметрами контактной подвески и токоприемника, скоростью движения троллейбуса и рядом других факторов. На троллейбусах ЗИУ -9Б применяются токоприемники типа РТ-6И (И.С. Ефремов, Г.В. Косарев. Теория и расчет троллейбусов. 4.1. М: "Высшая школа», 1981.), предназначенные для работы при напряжении сети 550 В и длительном токе 170 А. Токоприемник РТ -6И состоит из основания, штангодержателя с пружинами, штанги со штанговым проводом и контактной головкой.
Необходимое нажатие токоприемника на контактный провод создают две натяжные пружины. Верхние концы пружин отогнуты в виде петель и надеты на валик, запрессованный в штангодержателе. Соскакиванию пружин с валика препятствуют шайба и шплинт. Нижние концы натяжных пружин соединены с регулировочными тягами, предназначенными для регулировки натяжения пружин. Усилие нажатия на контактный провод в пределах рабочей высоты должно быть 14+1 кГ.
Недостатком токоприемника РТ -6И является то, при изменении высоты подвески контактных проводов, давление между головкой токоприемника и контактным проводом будет меняться, а значит, не будет полного съема тока и возрастает вероятность схода штанги с контактного провода.
Известен токоприемник для троллейбуса, содержащий токосъемный элемент и штангу, выполненную в виде двух шарнирносочлененных частей, верхняя из которых короче нижней и снабжена рычагом, с присоединенным к нему пружинным толкателем, нижний конец которого связан с другой частью штанги [Авторское свидетельство СССР №397386, кл. В 60/5/10, 25.1.1974], принятый за прототип.
Недостатком является то, что величина усилия пружинного толкателя меняется во время движения троллейбуса, а значит будет меняться и усилие между головкой токоприемника и контактным проводом, что приводит к нарушению полного съема тока.
Задачей (техническим результатом) заявляемого устройства является в обеспечение постоянного по величине контактного усилия между головкой троллейбуса и контактным проводом, улучшение съема тока с контактного провода, снижения вероятности спадания штанги при больших скоростях движения.
Поставленная задача достигается тем, что в известном устройстве поджатие головки к проводу обеспечивается за счет пружинного толкателя, который крепится шарнирно к нижней и верхней части штанги, в заявленном устройстве нижняя часть штанги крепится к корпусу жестко, а верхняя часть шарнирно соединяется с нижней. Пружина крепится одним концом на корпусе, а другим концом к кулачку, закрепленным шарнирно на нижней части штанги и выполненным с переменным радиусом закругления, а к барабану верхней части штанги крепится трос, сходящий с профиля кулачка.
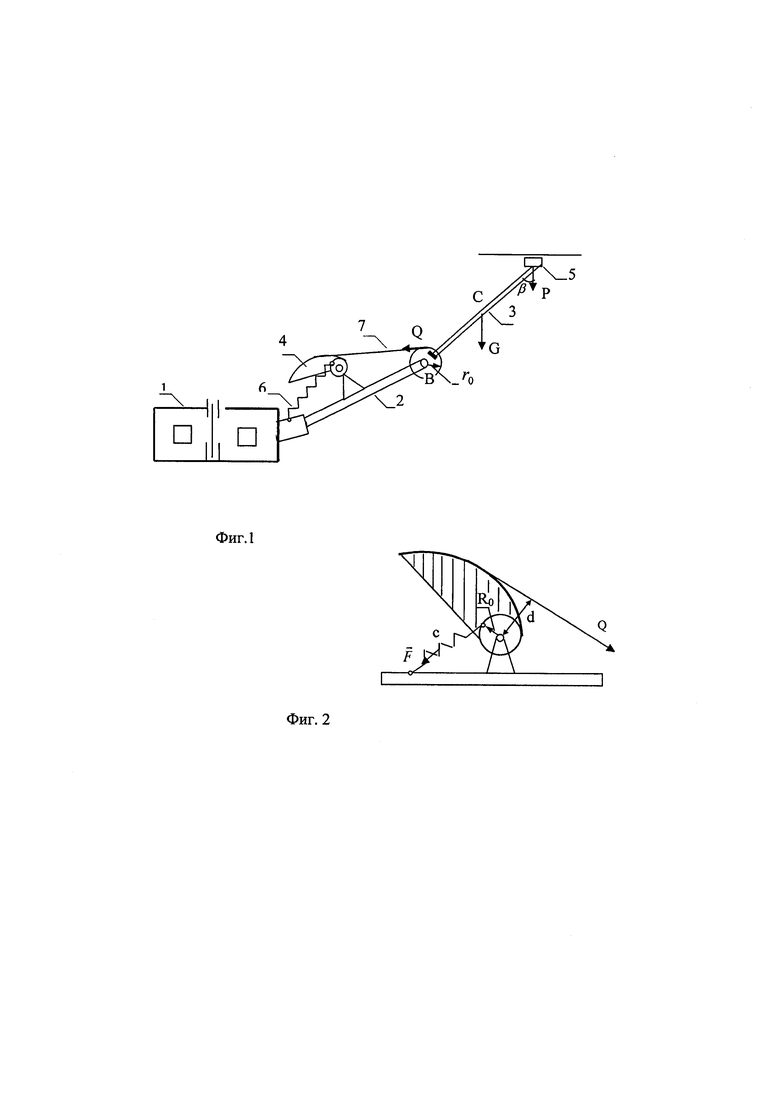
На фиг. 1 представлена схема токоприемника для троллейбуса со стабилизацией контактного нажатия.
На фиг. 2 представлена схема сил, действующих на кулачок.
Предлагаемое устройство (фиг. 1) содержит корпус 1, нижнюю штангу 2, верхнюю штангу 3, кулачок 4, контактную головку 5, пружину 6, трос 7. Рассмотрим статическое состояние устройства. Начальное положение кулачка 3 соответствует углу поворота его на угол ψн. Этот угол находится посередине диапазона 0<ψн<ψпр. Угол ψ=0 соответствует максимальному поднятию контактной головки 4 вместе с контактным проводом (пружина 5 в этом случае растянута на λ). Угол ψпр соответствует максимальному опусканию контактной головки 4 с контактным проводом.
Устройство работает следующим образом.
В случае увеличения давления на контактную головку 5 со стороны контактного провода (то есть штанга 3 стремится повернуться по ходу часовой стрелки), кулачок 4 начнет вращаться по ходу часовой стрелки (пружина 6 растягивается). Но за счет специально рассчитанной формы кулачка 4 усилие в тросе 7, сходящего с кулачка, остается постоянным и равным заданному Q. Для того, чтобы усилие в тросе 7 было во время поворота кулачка постоянным, необходимо чтобы моменты сил Q и упругой силы F относительно оси вращения кулачка были равны (фиг. 2)
Qd=c(λ+R0ψ)R0,
где Q - заданное усилие в тросе, сходящего с кулачка,
с - жесткость пружины,
ψ - угол поворота кулачка,
λ - деформация пружины при ψ=0,
R0 - радиус барабана кулачка,
d - длина перпендикуляра, опущенного из центра барабана кулачка на линию троса.
Отсюда длина перпендикуляра d, опущенного из центра барабана кулачка О на линию троса 7 должна изменяться по закону
где 
В случае движения контактной головки 5 с контактным проводом вверх кулачок 4 начнет вращаться против хода часовой стрелки (пружина 6 в этом случае сжимается). Но усилие в тросе 7, сходящего с кулачка 4 и прикрепленного к барабану штанги 3, будет неизменным и равным Q. Надо связать усилие Q с усилием Р между контактной головкой и контактным проводом. Для этого составим уравнение равновесия штанги 3

где G - вес штанги 3,
L - длина штаги 3,
ВС - расстояние от центра тяжести штанги 3 до оси вращения,
М=Q⋅r0 - постоянный момент силы Q.
Рассмотрим пример реализации.
Пусть вес штанги 3 равен 200 Н, длина штанги 3 равна 6 м, расстояние от шарнира В до центра тяжести штанги 3 равно 2 м. Примем рабочую высоту от контактного провода до основания токоприемника -3 м. Тогда угол наклона штанги 3 к горизонтали составит 30°, а угол β=60°. По формуле (1) найдем величину постоянного момента М, который необходимо приложить к штанге 3, учитывая что усилие нажатия на контактный провод должно 14+1 кГ. Тогда
М=1073.84 Нм.
Перемещение контактной головки 5 по вертикали, как правило, составляет 0.3 м, что составляет 2.86° углового перемещения штанги 3. Значения контактного усилия Р в верхней и нижнем положении контактной головки из формулы (1) составит:
в верхнем положении 143 Н,
в нижнем положении 137,4 Н
То есть значения усилия Р находятся в рамках допуска.
Таким образом поставленная задача решена.
| название | год | авторы | номер документа |
|---|---|---|---|
| ТОКОПРИЕМНИК НИЖНЕГО ТОКОСЪЕМА | 2018 |
|
RU2705391C1 |
| Способ борьбы с обледенением проводов | 2021 |
|
RU2784611C1 |
| ТОКОСЪЕМНАЯ ШТАНГА ТРОЛЛЕЙБУСА | 2009 |
|
RU2412069C1 |
| СПОСОБ ИЗГОТОВЛЕНИЯ ШТАНГИ ТОКОПРИЕМНИКА ТРАНСПОРТНОГО СРЕДСТВА | 2011 |
|
RU2453447C1 |
| УПРАВЛЯЕМЫЙ ТОКОПРИЕМНИК ТРОЛЛЕЙБУСА И КОНТАКТНАЯ СЕТЬ | 2006 |
|
RU2346830C2 |
| ТОКОПРИЕМНИК НИЖНЕГО ТОКОСЪЕМА | 2020 |
|
RU2747344C1 |
| Токоприемник безрельсового транспортного средства | 1988 |
|
SU1588581A1 |
| Токоприемник нижнего токосъема | 2023 |
|
RU2806924C1 |
| Токоприемник для транспортного средства им.Каушлы | 1981 |
|
SU1043046A1 |
| ЛАГШМ. Кл. В б'О/ 5/14УДК 621.3i36.613i(088.8) | 1973 |
|
SU375218A1 |
Изобретение относится к токоприемникам транспортных средств, в частности к конструктивным особенностям штанг. Токоприемник для троллейбуса содержит токосъемный элемент и штангу, выполненную в виде двух шарнирносочлененных нижней и верхней частей штанги. Нижняя часть штанги жестко крепится к корпусу, а верхняя часть шарнирно соединяется с нижней. На нижней части штанги установлен кулачок с переменным радиусом закругления, с профиля которого сходит трос на барабан, жестко связанный с верхней частью штанги. Пружина крепится одним концом с корпусом, а другим с барабаном кулачка. Технический результат заключается в обеспечении постоянного по величине контактного усилия между головкой токоприемника и контактным проводом. 2 ил.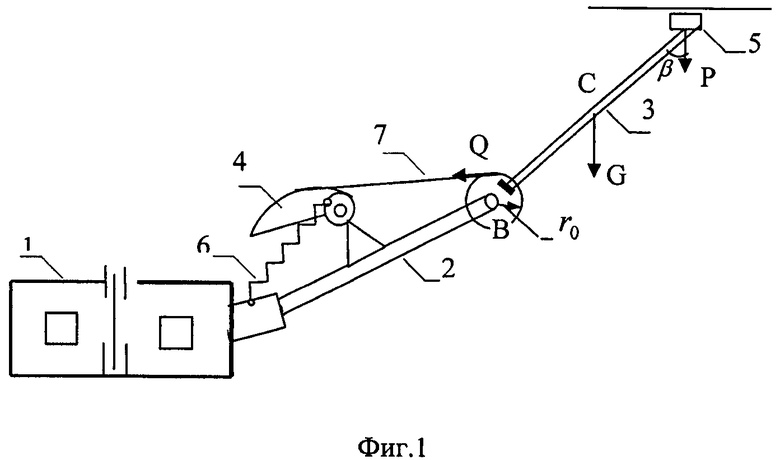
Токоприемник для троллейбуса, содержащий токосъемный элемент и штангу, выполненную в виде двух шарнирносочлененных частей, отличающийся тем, что на нижней части штанги, жестко скрепленной с корпусом, установлен кулачок с переменным радиусом закругления, с профиля которого сходит трос на барабан, жестко связанный с верхней частью штанги, пружина крепится одним концом с корпусом, а другим с барабаном кулачка.
| Токоприемник | 1978 |
|
SU742183A1 |
| ТОКОПРИЕМНИК, НАПРИМЕР, ДЛЯ ТРОЛЛЕЙБУСА | 0 |
|
SU397386A1 |
| УСТРОЙСТВО ДЛЯ ЗАКАЛКИ ПЛАСТИН ШИН ПИЛЬНЫХ АППАРАТОВ | 1991 |
|
RU2031148C1 |

