(54) ГАЗОСТАТИЧЕСКАЯ ОПОРА
| название | год | авторы | номер документа |
|---|---|---|---|
| Газостатический амортизатор | 1981 |
|
SU998784A1 |
| Виброизолирующая опора | 1982 |
|
SU1104324A1 |
| СТАНОК ПОРТАЛЬНОГО ТИПА С УСТРОЙСТВОМАВТОМАТИЧЕСКОЙ КОМПЕНСАЦИИ УПРУГИХПЕРЕМЕЩЕНИЙ | 1972 |
|
SU427832A1 |
| Система программного управления процессом порционной вакуумной обработки стали | 1989 |
|
SU1684347A2 |
| АНТИШОКОВАЯ ПОДВЕСКА | 2018 |
|
RU2676843C1 |
| Пневмоопора | 1979 |
|
SU838170A1 |
| Регулятор частоты вращения вала энергетической установки | 1989 |
|
SU1740734A1 |
| Стенд для диагностики рулевых приводов транспортных средств | 1989 |
|
SU1651133A1 |
| ЛОЖЕМЕНТНАЯ ОПОРА ДЛЯ ТРАНСПОРТИРОВКИ ДЛИННОМЕРНЫХ НЕЖЕСТКИХ И НЕВИБРОСТОЙКИХ ГРУЗОВ | 2005 |
|
RU2353850C2 |
| Источник сейсмических сигналов | 1987 |
|
SU1436087A1 |
1
Изобретение относится к средствам защиты от вибраций различных объектов.
Известна опора, содержащая корпус с двумя связанными между собой камерами, заполненными газом, и автоматическую систему управления расходом газа между камерами fl .
Недостаток опоры заключается в малом демпфировании опоры. .
Наиболее близкой к предлагаемой по технической сущности и достигаемому результату является газостатическая опора, содержащая корпус с двумя связанными между собой камерами, заполненными газом, и регулятор уровня f2} .
Недостаток опоры заключается в малой эффективности демпфирования, обусловленной узким частотным рабочим диапазоном.
Цель изобретения - повышение эффективности демпфирования колебаний.
Указанная цель достигается тем, что опора снабжена регулятором расхода, выполненным в виде золотника, межпор1инев&я полость которого соединена с камерами, и управляющего электромагнита, связанного со гатоком золотника, последовательно соединенными между собой датчиком перемещений, устанавливаемым на объекте,усилителем, фил зтpoм нижних частот (ФНЧ), вторым усилителем, фазовым дискриминатором, усилителеммощности и коммутатором, выход которого подключен ко входу управляющего электромагнита, и блокированным устройством, вход которого соединен с дат10чиком перемещений, а выход - с коммутатором.
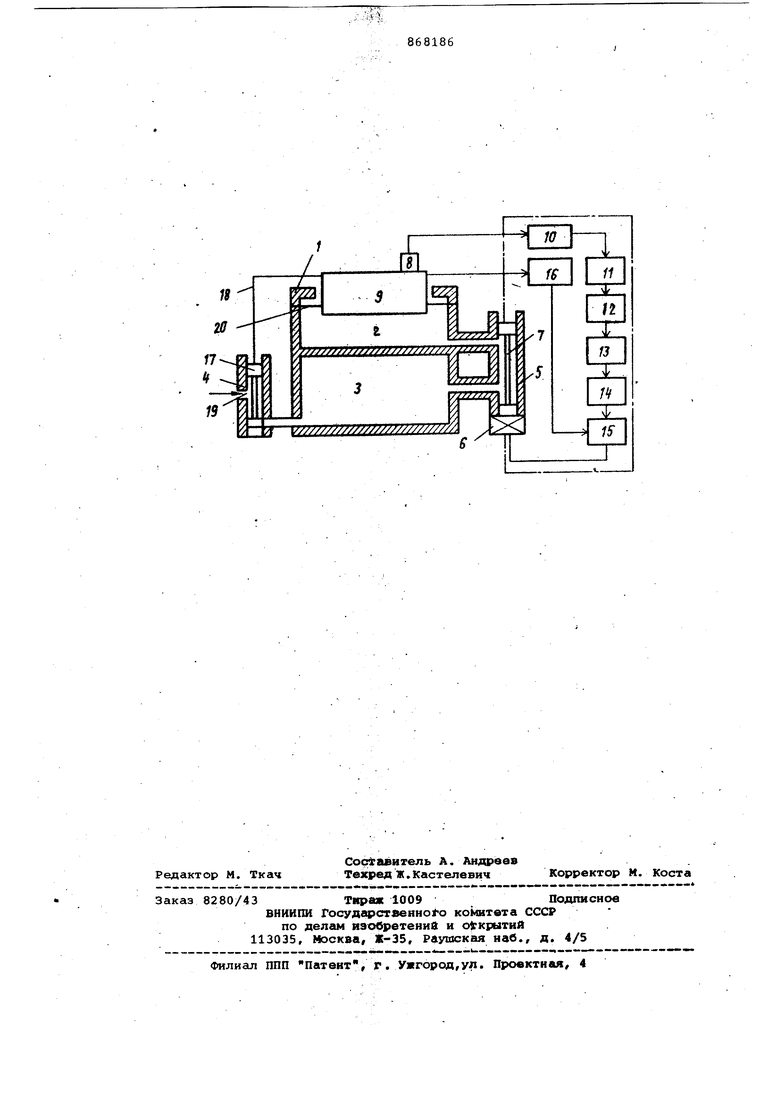
На чертеже изображена схема газостати че с кой опоры.
Опора содержит корпус 1 с двумя
15 связанными между сс5бой камерами 2 и 3, заполненными газом, регулятор 4 уровня, регулятор расхода, выполненный в виде золотника 5, межпоршневая полость которого соединена с каме20рами 2 и 3, и управляющего электромагнита 6, связанного со штоком 7 золотника, последовательно соединенные между собой датчик 8 перемещений, устанавливаемый на объекте 9, усилитель 10, фильтр 11 нижних частот,
второй усилител,ь 12, фазовый дискриминатор 13, усилитель 14 мощности, коммутатор 15, выход которого подклю чен ко входу управляющего электромагнита 6, и блокировочное устройптво 16, вход которого соединен с датчиком 8, а выход - с коммутатором 15, Регулятор 4 уровня выполнен в виде золотника 17 и рычага 18 обратной связи, связывающего его с объектом 9. Внутренняя полость золотника 17 связана с питающей магистралью 19 сжатого газа и с камерой 3.
Объект установлен на упругой мембране 20,
Опора работает следунадим образом. При заполнении камер 2 и 3 сжатым газом через питающую магистраль 19 объект 9 приподнимается, к посредством рычага 18 поршень золотника 17 перекрывает канал, связывающий золотник с камерой 3. В камерах 2 и 3 устанавливается давление, необходимое для поддержания объекта в положении равновесия, при этом срабатывает блокировочное устройство 16, и коммутатор 15 подключает вход управляющего электромагнита 6 к усилителю 14 мощности .
При уменьшений веса объекта последний приподнимается, и золотник 1 сообщает камеру 3 с атмосферой, выпуская сжатый газ до тех пор, пока объект не вернется в заданное положение равновесия.
При колебаниях-объекта датчик 8 вырабатывает сигнал, который усилийается в усилителях 10 и 12, фильтруется и подается на вход фазового дискриминатора 13, который вырабатывает сигнал управления, величина и полярность которого зависит от частоты колебаний объекта. Сигнал.подается на усилитель 14 мощности и далее через коммутатор 15- - на управлякжий электромагнит 6, рабочий орган которого жестко связан со штоком 7 золотника 5 .
Пуи колебаниях с малой частотой шток 7 золотника 5 находится в нижнем положении, уменьшая проходное сечение канала, связывающего межпораневую полость золотника и камеру 2. По мере увеличения частоты шток 7 сдвигается вверх, при этом изменяется гидравлическое сопротивление каналов, связывающих межпоршневую полость золотника 5 и камеры 2 и 3, обеспечивая оптимальное демпфирование колебаний объекта в рабочем диапазоне частот опоры.
Применение предлагаемой опоры позволяет уменьшить динамические нагрузки, приходящиеся на объект, что приводит в конечнбм счете к повышению надежности его работы.
Формула изобретения
5 Газостатическая опора, содержащая корпус с двумя связанными между со,бой камерами, заполненными газом, и регулятор уровня, отличающаяся тем, что, с целью, повышения эффективности демпфирования колебаний, опора снабжена регулятором расхода, выполненным в виде золотника, мвжпоршневая полость которого соединена с камерами, и управляющего 5 электромагнита, связанного со штоком зслотника, последовательно соединенными между собой датчиком перемещений, устанавливаемым на объекте, усилителем, фильтром нижних частот,втол рым усилителем, фазовым дискриминатором, усилителем мощности и коммутатором, выход которого подключен ко входу управляющего электромагнита, и блокировочным устройством, вход которого соединен с датчиком перемещений, а выход - с коммутатором.
Источники информации, принятые во внимание при экспертизе
1, Авторское свидетельство СССР 568770, кл, F 16 F 9/50, 1974,
2, ГриганОв А,С, и др. Исследование динамики пневматической системы виброизоляции с сервоуправлением. Сб, Автоматизация исследования динамики машин. М,, Наука, 1973 (прототип).
