(54) МЕХАНИЗМ ПОСТУПАТЕЛЬНОГО ДВИЖЕНИЯ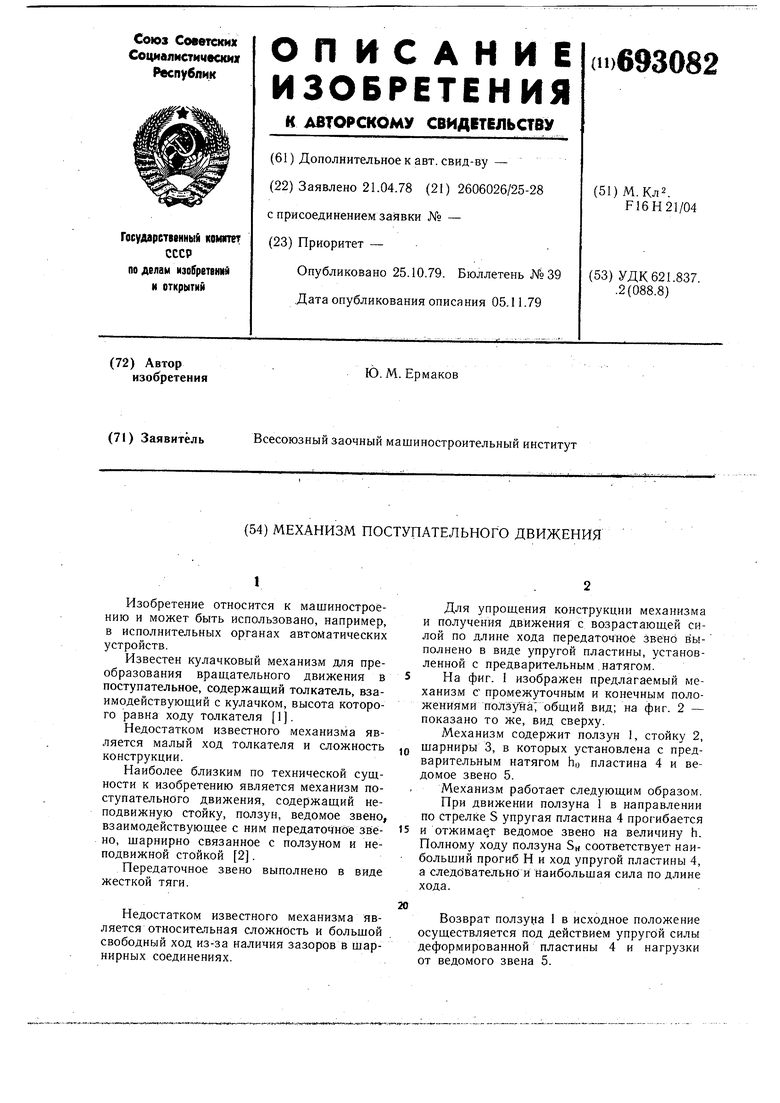
| название | год | авторы | номер документа |
|---|---|---|---|
| Механизм поступательного движения | 1979 |
|
SU868197A1 |
| Механизм преобразования поступательного движения | 1980 |
|
SU1113606A1 |
| Ударно-поворотный механизм | 1987 |
|
SU1661398A1 |
| КРИВОШИПНЫЙ МЕХАНИЗМ В.И. ПОЖБЕЛКО С ТОЧНЫМИ ОСТАНОВКАМИ | 2005 |
|
RU2283446C1 |
| МУСКУЛЬНЫЙ ПРИВОД ТРАНСПОРТНОГО СРЕДСТВА | 2003 |
|
RU2247676C2 |
| СТЕНД ДЛЯ ИЗМЕРЕНИЯ КОЛЕБАНИЙ ВЫХОДНОГО ЗВЕНА КУЛАЧКОВО-ЗУБЧАТО-РЫЧАЖНОГО МЕХАНИЗМА | 1993 |
|
RU2066858C1 |
| КОМБИНИРОВАННЫЙ МЕХАНИЗМ СО СЛОЖНЫМ ДВИЖЕНИЕМ ВЫХОДНЫХ ЗВЕНЬЕВ | 2006 |
|
RU2303520C1 |
| МАНИПУЛЯТОР ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2008 |
|
RU2390406C1 |
| МЕХАНИЗМ ДЛЯ ПРЕОБРАЗОВАНИЯ ВОЗВРАТНОГО ДВИЖЕНИЯ ВО ВРАЩАТЕЛЬНОЕ | 2001 |
|
RU2223430C2 |
| ШАРНИРНЫЙ ЧЕТЫРЕХЗВЕННЫЙ МЕХАНИЗМ В.И. ПОЖБЕЛКО | 2003 |
|
RU2247273C2 |
1
Изобретение относится к машиностроению и может быть использовано, например, в исполнительных органах автоматических устройств.
Известен кулачковый механизм для преобразования врашательного движения в поступательное, содержащий толкатель, взаимодействующий с кулачком, высота которого равна ходу толкателя 1.
Недостатком известного механизма является малый ход толкателя и сложность конструкции.
Наиболее близким по технической сущности к изобретению является механизм поступательного движения, содержащий неподвижную стойку, ползун, ведомое звено, взаимодействующее с ним передаточное зве:но, шарнирно связанное с ползуном и неподвижной стойкой 2.
Передаточное звено выполнено в виде жесткой тяги.
Недостатком известного механизма является относительная сложность и большой свободный ход из-за наличия зазоров в шарнирных соединениях.
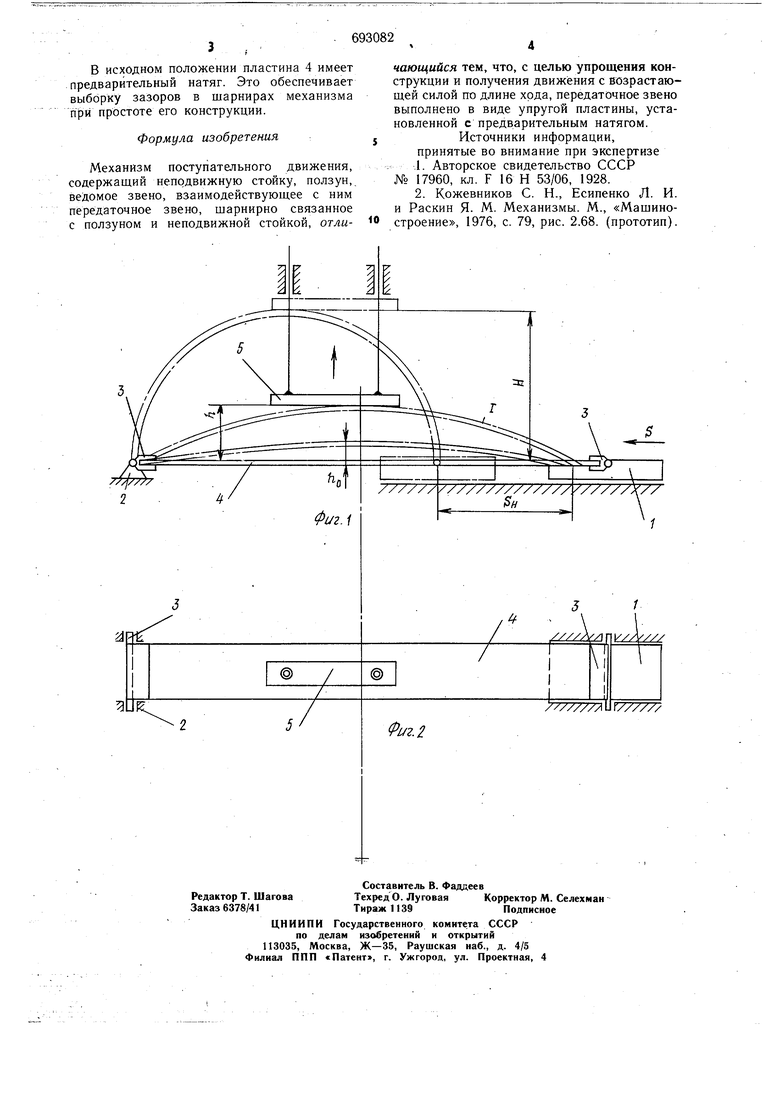
Для упрощения конструкции механизма и получения движения с возрастающей силой по длине хода передаточное звено выполнено в виде упругой пластины, установленной с предварительным натягом. На фиг. 1 изображен предлагаемый механизм с промежуточным и конечным положениями поЛзунау общий вид; на фиг. 2 - показано то же, вид сверху.
Механизм содержит ползун 1, стойку 2, шарниры 3, в которых установлена с предварительным натягом ho пластина 4 и ведомое звено 5.
Механизм работает следующим образом.
При движении ползуна 1 в направлении по стрелке S упругая пластина 4 прогибается и отжимает ведомое звено на величину h. Полному ходу ползуна SH соответствует наибольший прогиб Н и ход упругой пластины 4, а следовательно и наибольшая сила по длине хода.
Возврат ползуна 1 в исходное положение осуществляется под действием упругой силы деформированной пластины 4 и нагрузки от ведомого звена 5.
В исходном положении пластина 4 имеет предварительный натяг. Это обеспечивает выборку зазоров в шарнирах механизма при простоте его конструкции.
Формула изобретения
Механизм поступательного движения, содержащий неподвижную стойку, ползун,, ведомое звено, взаимодействующее с ним передаточное звено, шарнирно связанное с ползуном и неподвижной стойкой, отличающийся тем, что, с целью упрощения конструкции и получения движения с возрастающей силой по длине хода, передаточное звено выполнено в виде упругой пластины, установленной с предварительным натягом.
Источники информации, принятые во внимание при экспертизе
