(Л
////у///////////////
оо со ел
оо
//////// ////////
.
N)
Фиг.1
Изобретение относится к машиностроению, может быть использована в исполнительных органах для перемещения изделий в двух направлениях с автоматическим управлением и является усовершенствованием изобретения по авт.св. № 693082.
Цель изобретения - расширение кинематических возможностей путем пере дачи движения в одном из двух возможных направлений.
На фиго 1 изображен механизм поступательного движения, общий вид; на фиг. 2 - то же, вид сверху о
Механизм содержит размещенный в направляющих корпуса 1 ползун 2, который соединен со стойкой 3 при помощи упругой пластины 4, выполненной из ферромагнитного материала, шарнирно связанной одним концом со стойкой 3, а другим - с ползуном 2.
Симметрично по обе стороны относительно продольной оси упругой пластины 4 в зоне ее прогиба (показано штрихпунктирными линиями) расположены основное 5 и дополнительное
6ведомые звенья.
Вне пространства, которое занимает прогибающаяся упругая пластина 4, симметрично ее продольной оси в непосредственной близости от упругой пластины 4 установлены два электромагнита 7 и 8. Упругая пластина 4 из ферромагнитного материала взаимодействует (притягивается) с магнитным полем электромагнитов.
Механизм работает следующим образом.
При невключенных электромагнитах
7и 8 упругая пластина 4 занимает среднее положение и не имеет начального прогиба.
При необходимости движения упругой пластины 4 и ведомого звена 5 вверх (по стрелке В) включают электромагнит 7. Упругая пластина 4 оказывается в магнитном поле электромагнита 7 и прогибается вверх. Далее при движении ползуна 2 влево упругая пластина 4 прогибается вверх и занимает положение, соответствующее ходу ведомого звена 5, равному h или
П мпис
Обратно ползун 2
возвращается под
действием упругой пластины 4, которая при этом распрямляется до исходного положения.
Если затем включить электромагнит 8, то упругая пластина 4 прогибается вниз. После движения ползуна 2 влево упругая пластина 4 прогибается вниз и взаимодействует с дополнительным ведомым звеном 6, перемещая его вниз (по стрелке Н) .
Полному ходу S j ползуна 2 соответствует максимальный прогиб h ачс упругой пластины 4.
Формула и 3 обретения
Механизм поступательного движения по авт.св. № 693082, отличающийся тем, что, с целью расширения кинематических возможностей путем передачи дв1таения в одном из двух возможных направлений, упругая пластина выполнена из ферромагнитного материала, а механизм снабжен двумя электромагнитами, расположенными симметрично по обе стороны пластины, и дополнительным ведомым звеном, расположенным симметрично основному относительно продольной оси пластины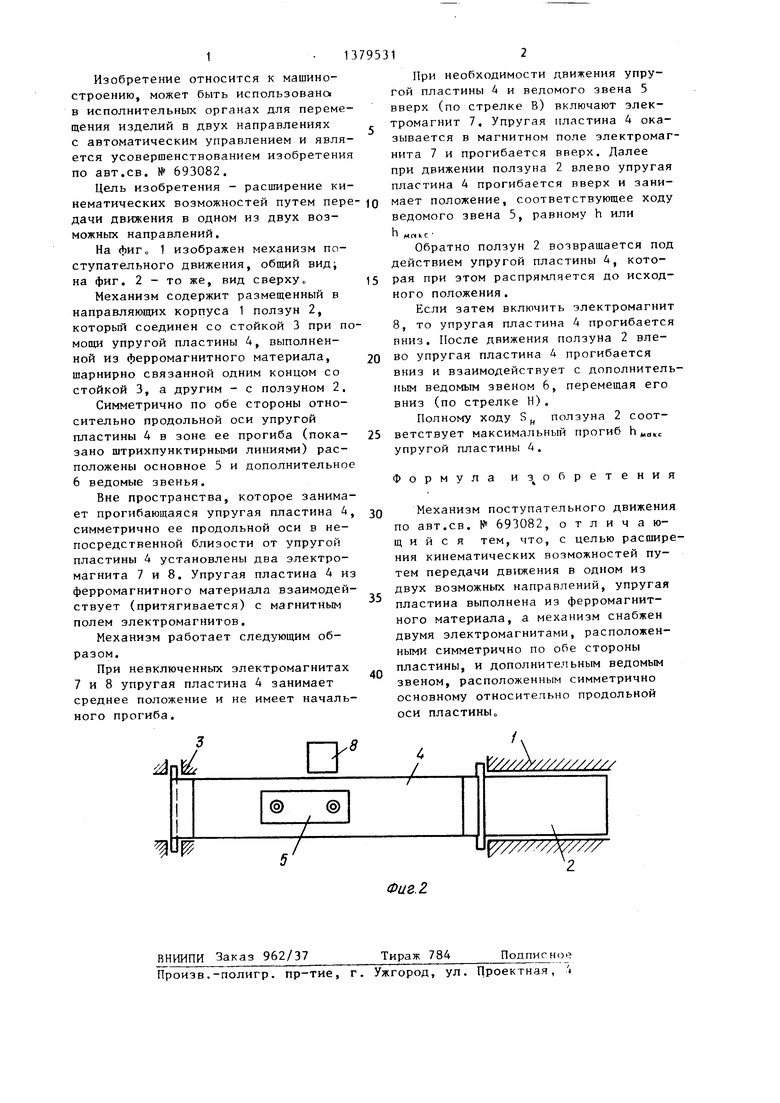
| название | год | авторы | номер документа |
|---|---|---|---|
| МЕХАНИЗМ, ПРЕОБРАЗУЮЩИЙ ВОЗВРАТНО-ПОСТУПАТЕЛЬНОЕ ДВИЖЕНИЕ В ВОЗВРАТНО-ПОВОРОТНОЕ, И ЗАПОРНОЕ УСТРОЙСТВО ДЛЯ ТРУБОПРОВОДОВ | 2009 |
|
RU2480657C2 |
| Устройство для поштучной выдачи деталей | 1983 |
|
SU1143573A1 |
| ЛИНЕЙНЫЙ ШАГОВЫЙ ЭЛЕКТРОДВИГАТЕЛЬ | 2002 |
|
RU2222091C1 |
| Правильный пресс | 1978 |
|
SU770602A1 |
| ПОВОРОТНОЕ УСТРОЙСТВО | 2006 |
|
RU2304242C1 |
| Автоматическая линия для изготовления арматурных каркасов | 1984 |
|
SU1337176A1 |
| ЭЛЕКТРОМАГНИТНЫЙ ЛИНЕЙНЫЙ ДВИГАТЕЛЬ | 1999 |
|
RU2149493C1 |
| Устройство для навивки пружин | 1981 |
|
SU1028408A1 |
| Шарнирно-кривошипный механизм с регулируемым ходом ползуна | 1988 |
|
SU1514994A2 |
| Устройство для преобразования колебательного движения в реверсивное поступательное | 1986 |
|
SU1372129A1 |
Изобретение относится к машиностроению. Цель изобретения - расширение кинематических возможностей путем передачи движения в одном из двух возможных направлений. В направляющих корпуса 1 размещен ползун 2, шарнирно соединенный со стойкой 3 ферромагнитной упругой,пластиной 4, по обе стороны от которой расположены ведомые звенья и управляюгцне электромагниты 7 и 8, задающие начальный прогиб пластине 4. В зависимости от того в какую сторону направлен начальный прогиб упругой пластины 4, в ту сторону она прогибается при движении ползуна 2 влево. Обратно ползун 2 возвращается под действием силы изогнутой ферромагнитной упругой пластины 4. 2 ил. с &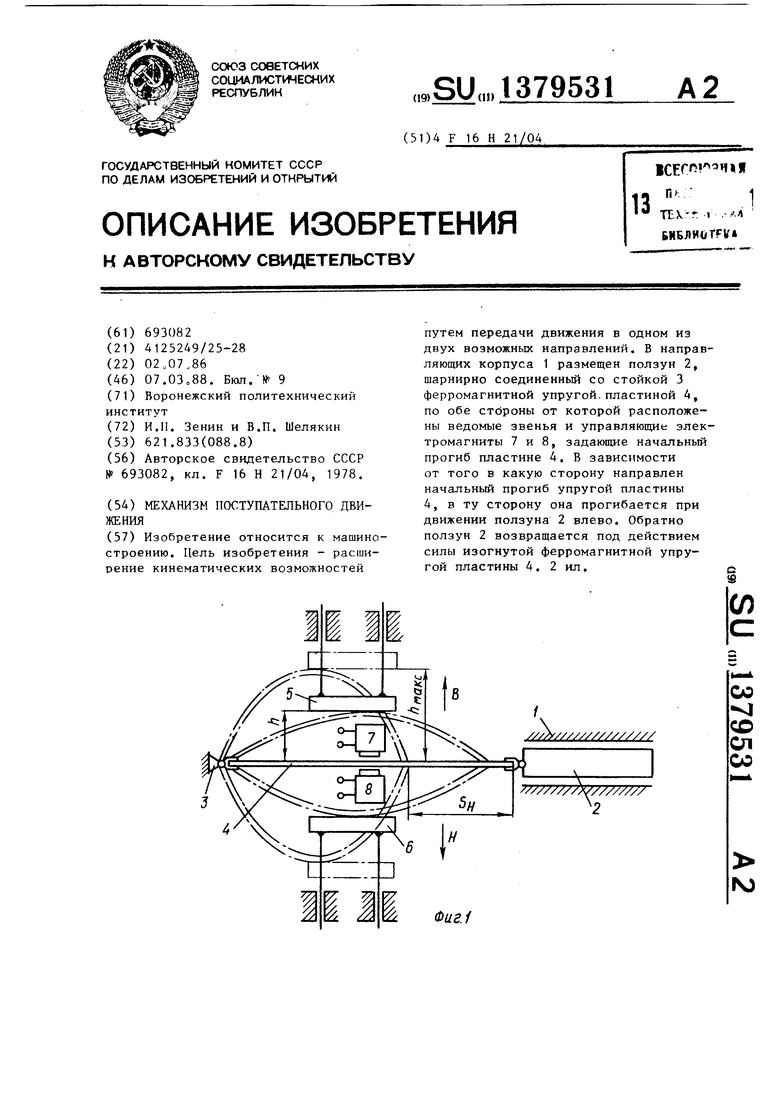
ВНИИПИ Заказ 962/37
Произв.-полигр. пр-тие, г. Ужгород, ул. Проектная,
Фаг.2
Тираж 784
Подпис Hot
| Механизм поступательного движения | 1978 |
|
SU693082A1 |
| Устройство для электрической сигнализации | 1918 |
|
SU16A1 |
