Изобретение относится к устройствам вращательного движения для преобразования вращения ведущего вала в требуемый закон движения рабочего органа, а также к механизмам для воспроизведения сложных кривых и может найти применение в машиностроении для фасонной обработки деталей, а также в автоматических линиях и манипуляторах для согласованного привода нескольких рабочих органов.
Известен шарнирный многозвенный механизм Чебышева, звенья которого образуют со стойкой замкнутую кинематическую цепь с разной длиной звеньев, в котором движение одной из точек шатуна по близкой к окружности траектории обеспечивает в этот период приближенную условную остановку рабочего органа [1].
Недостатками известного механизма являются ограниченные кинематические возможности реализации движения по волнообразной поверхности; происходящее во время приближенной остановки осевое перемещение рабочего органа (например, инструмента - сверла, метчика и т.д.) относительно оси детали при ее обработке недопустимо в машинах-автоматах; кроме того, достигается привод только одного рабочего органа.
Известен также шарнирный многозвенный механизм Кардана, содержащий ведущий кривошип, шатун, ползуны и зубчатое колесо, имеющее привод от кривошипа [2].
Недостатками этого механизма являются сложность конструкции и ограниченные кинематические возможности движения рабочего органа только по прямой [2].
Наиболее близким по технической сущности и достигаемому эффекту к предлагаемому изобретению является шарнирный четырехзвенный механизм, содержащий вращающиеся ведущее и ведомое звенья, шарнирно соединенные со стойкой и через шатун между собой, образующие со стойкой замкнутую кинематическую цепь с разной длиной звеньев, в которой рабочий орган соединен с шатуном [3].
Недостатками указанного механизма являются ограниченные кинематические возможности, не позволяющие воспроизводить сложные волнообразные кривые при фасонной обработке деталей и обеспечивать согласованный привод нескольких рабочих органов, в том числе прерывистого движения (требуемого во всех машинах-автоматах).
Цель изобретения - расширение кинематических возможностей за счет обеспечения движения по волнообразной кривой (половина лемнискаты) в сочетании с полуокружностью, а также за счет одновременного привода двух рабочих органов, один из которых вращается с периодическими, точными остановками.
Это достигается за счет того, что противоположно расположенные звенья кинематической цепи механизма выполнены одинаковой длины, шатун сделан большей длины, чем ведущий кривошип, а ведомый кривошип снабжен упругим устройством для его соединения со стойкой и фиксации при сборке механизма в перпендикулярном относительно стойки положении.
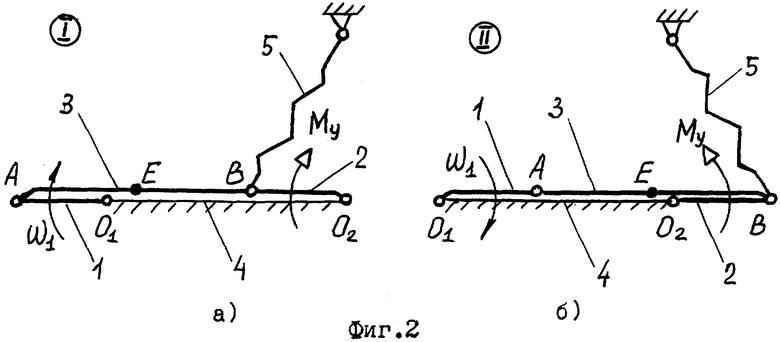
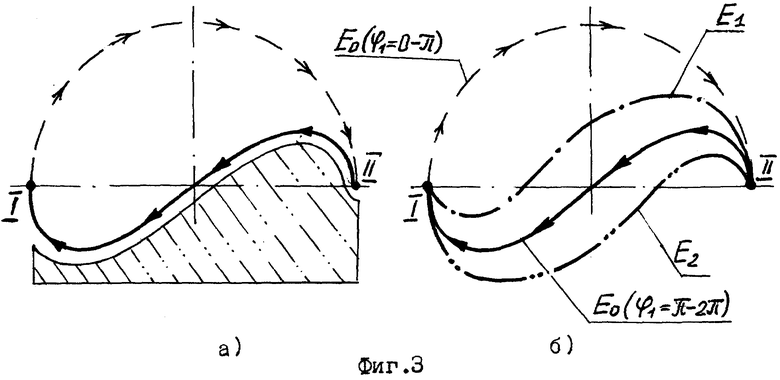
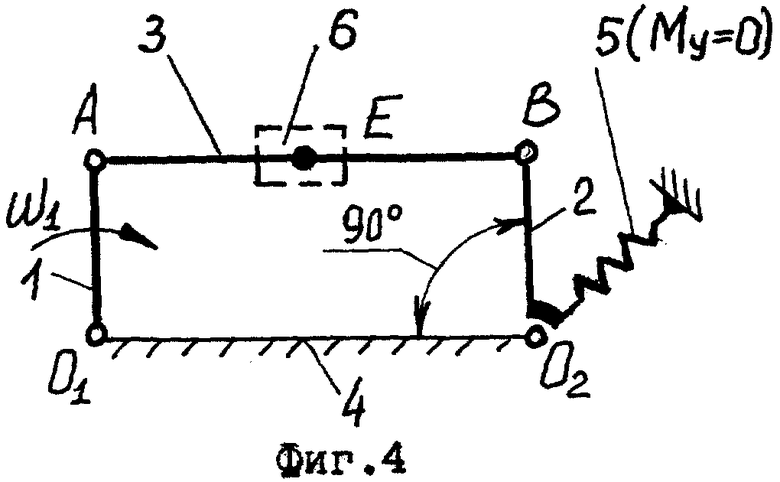
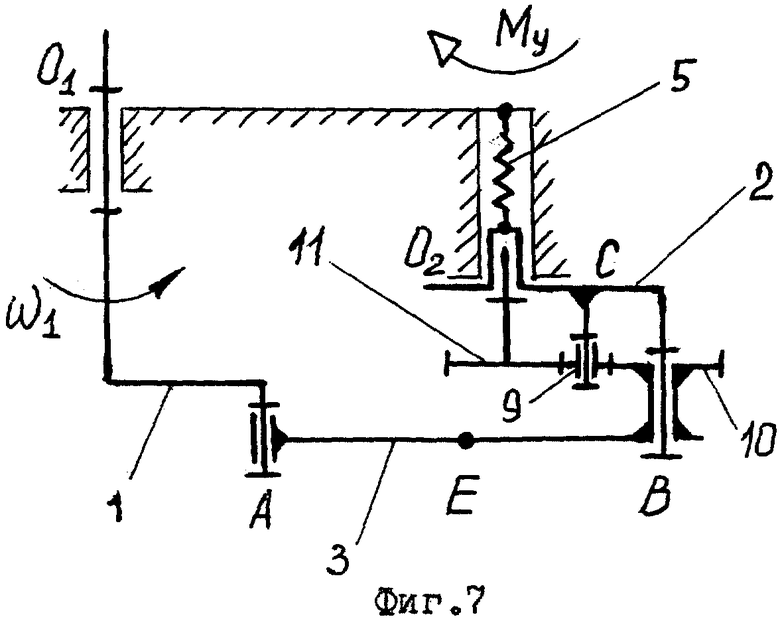
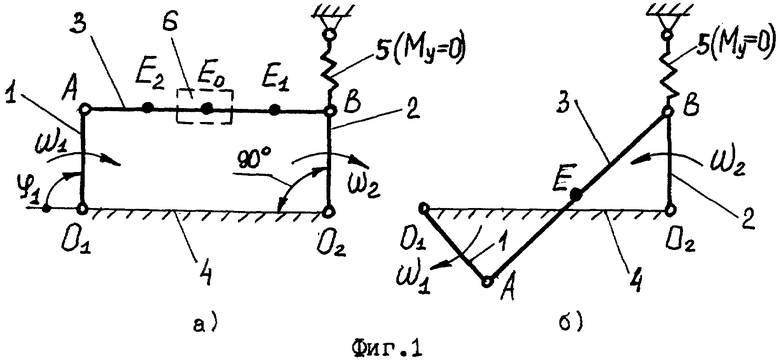
На фиг.1 показана кинематическая схема механизма с упругим устройством в виде пружины растяжения; на фиг.2 даны крайние положения звеньев механизма; на фиг.3 показаны возможные траектории движения рабочего органа при его закреплении в разных точках (Е0, E1, Е2) по длине шатуна (АЕ0=АВ/2; AE1>АВ/2; АЕ2<АВ/2). На фиг.4, 5 и 6 показаны варианты выполнения упругого устройства соединения и фиксации ведомого кривошипа на стойке в виде: торсионного вала (фиг.4), подпружиненной рейки с зубчатым колесом (фиг.5) или двух подпружиненных роликовых толкателей с кулачком (фиг.6). На фиг.7 дана схема механизма с дополнительным приводом периодического поворота с точной остановкой ведомого колеса 11, передающего прерывистое движение на второй рабочий орган (не показан).
Механизм содержит ведущий кривошип 1 и ведомый кривошип 2, шарнирно соединенные непосредственно со стойкой и посредством шатуна 3 между собой и образующие со стойкой 4 замкнутую кинематическую цепь с разной длиной звеньев. Противоположно расположенные звенья цепи выполнены одинаковой длины (O1A=ВO2, АВ=O1O2), шатун 3 сделан большей длины, чем ведущий кривошип 1 (АВ>AO1). Ведомый кривошип 2 снабжен упругим устройством 5, соединяющим его со стойкой и фиксирующим ведомый кривошип при сборке механизма в перпендикулярном относительно стойки положении. Упругое устройство 5 соединения и фиксации кривошипа 2 относительно стойки 4 может быть выполнено в виде: пружины растяжения (фиг 1); торсионного вала (фиг.4); подпружиненной рейки в зацеплении с соосно закрепленным на ведомом кривошипе 2 зубчатым колесом 7 (фиг.5); симметрично расположенных относительно оси вращения ведомого кривошипа 2 подпружиненных упоров в виде двух подпружиненных роликовых толкателей, взаимодействующих с соосно закрепленным на ведомом кривошипе 2 вдоль его длины односторонне выпуклым кулачком 8. Шатун 3 снабжен подвижным ползуном 6 для закрепления на нем рабочего органа с возможностью перемещения по длине шатуна и последующей фиксации в разных его точках (Е0, E1, Е2).
В перпендикулярном относительно стойки положении ведомого кривошипа 2 устройство 5 не создает на нем упругий момент (My=0), а при отклонении звена 2 от указанного нейтрального положения сила от деформации упругого устройства 5 будет создавать на звене 2 относительно точки O2 упругий момент, направленный в разные стороны.
Для обеспечения от ведущего кривошипа 1 привода периодического поворота другого рабочего органа - на ведомом кривошипе в точке С посередине его длины шарнирно установлено зубчатое колесо 9 в зацеплении с двумя другими зубчатыми колесами 10 и 11, выполненными одинакового диаметра. Колесо 10 жестко закреплено на шатуне 3 со стороны ведомого кривошипа, а колесо 11 свободно установлено на оси ведомого кривошипа и кинематически связано с приводом второго рабочего органа (на фиг.7 не показан).
Механизм работает следующим образом.
При вращении ω 1 ведущего кривошипа 1 из крайнего левого положения I (фиг.2, а) в крайнее правое II (фиг.2, б) - растянутая пружина упругого устройства 5 создает на ведомом кривошипе 2 упругий момент (My) в направлении ω 1 и механизм работает по схеме параллелограмма (фиг.1) с движением точки Е шатуна по полуокружности (фиг.3). При дальнейшем вращении ведущего кривошипа 1 в направлении ω 1 растянутая пружина будет создавать на ведомом кривошипе 2 упругий момент (My) в другую сторону, т.е. против ω 1 - в результате этого ведомый кривошип 2 при обратном переходе из крайнего положения II в крайнее положение I будет вращаться в другую сторону относительно ω 1 и механизм превратится в антипараллелограмм с движением точки Е шатуна по волнообразной половине лемнискаты (фиг.3). Перемещая ползун 6 по длине шатуна 3, можно получить как симметричную волнообразную кривую (точка Е0), так и несимметричную (точки E1 и Е2).
Особенностью работы рассматриваемого механизма по схеме параллелограмма (фаза поворота ведущего кривошипа на угол ω 1=0-180° из I из II) является синхронное вращение ведомого кривошипа 2 с той же скоростью ω 2=ω 1 и круговое поступательное движение шатуна 3 с угловой скоростью ω 3=0, в результате чего ведомая шестерня 11 при движении точки Е по полуокружности (фиг.3) будет оставаться абсолютно неподвижной. При дальнейшем повороте ведущего кривошипа 1 на угол ϕ 1=180° -360° (т.е. обратно из II в I) работа механизма по схеме антипараллелограмма приводит к вращению ведомого кривошипа 2 с переменной угловой скоростью ω 2≠ω 1, из-за чего возникает скорость шатуна ω 3≠0 и вращение ведомой шестерни 11 (в этот период точка Е перемещается по волнообразной половине лемнискаты).
Достигаемый в предлагаемом механизме положительный эффект заключается в расширении кинематических возможностей механизма за счет:
1. Реализации движения рабочего органа по лемнискате в сочетании с полуокружностью (что позволяет производить фасонную обработку волнообразных деталей и регулировку профиля волны (фиг.3, б)) с отводом инструмента из зоны обработки в исходное положение по полуокружности (сечение обрабатываемой детали на фиг.3 заштриховано).
2. Обеспечения согласованного привода периодического поворота дополнительного рабочего органа с продолжительной точной остановкой ведомого колеса 11 в пределах поворота ведущего кривошипа 1 на угол 180° .
Источники информации, принятые во внимание:
1. Боренштейн Ю.П. Исполнительные механизмы со сложным движением рабочих органов. - Л.: Машиностроение, 1973, с. 12, рис. 13 - аналог.
2. Там же, с. 16, рис. 19 - аналог.
3. Озол О.Г. Теория механизмов и машин. Пер. с латыш. /Под ред. Кожевникова С.Н. - М.: Наука, 1984, с. 81, рис. 5.1 - прототип.
| название | год | авторы | номер документа |
|---|---|---|---|
| КРИВОШИПНЫЙ МЕХАНИЗМ ИЗМЕНЯЕМОЙ СТРУКТУРЫ | 2020 |
|
RU2750997C1 |
| СПОСОБ И МЕХАНИЗМ В.И. ПОЖБЕЛКО ДЛЯ ВОСПРОИЗВЕДЕНИЯ ВРАЩЕНИЯ С ОСТАНОВКАМИ | 2003 |
|
RU2249133C1 |
| ЗУБЧАТО-РЫЧАЖНЫЙ МЕХАНИЗМ С ПЕРИОДИЧЕСКИМИ ОСТАНОВКАМИ В.И. ПОЖБЕЛКО | 2003 |
|
RU2252350C1 |
| ШАРНИРНЫЙ ВИБРОУДАРНЫЙ МЕХАНИЗМ | 2022 |
|
RU2783900C1 |
| КРИВОШИПНЫЙ МЕХАНИЗМ В.И. ПОЖБЕЛКО С ТОЧНЫМИ ОСТАНОВКАМИ | 2005 |
|
RU2283446C1 |
| РЫЧАЖНЫЙ МЕХАНИЗМ В.И. ПОЖБЕЛКО С ТОЧНЫМ ДЛИТЕЛЬНЫМ ВЫСТОЕМ | 2023 |
|
RU2836248C1 |
| РЫЧАЖНЫЙ МЕХАНИЗМ В.И. ПОЖБЕЛКО | 2003 |
|
RU2246056C1 |
| СКЛАДЫВАЮЩИЙСЯ МНОГОКРАТНЫЙ КРИВОШИПНО-КОРОМЫСЛОВЫЙ МЕХАНИЗМ | 2024 |
|
RU2833554C1 |
| МЕХАНИЗМ ПЛАВАЮЩЕГО ШАРНИРНОГО ПАРАЛЛЕЛОГРАММА | 2021 |
|
RU2765387C1 |
| МНОГОКРАТНЫЙ ШАРНИР ПЕРЕДАЧИ | 2013 |
|
RU2543135C2 |


Изобретение относится к машиностроению и может быть использовано в устройствах для воспроизведения сложных кривых и технологическом оборудовании для фасонной обработки деталей. Механизм содержит ведущий 1 и ведомый 2 кривошипы, шарнирно соединенные посредством шатуна 3, длина которого больше длины каждого из кривошипов. Ведомый кривошип 2 соединен со стойкой 4 упругим устройством 5. Шатун 3 снабжен подвижным ползуном 6 для закрепления на нем рабочего органа, установленным с возможностью перемещения по длине шатуна и последующей фиксации на нем. Технический результат заключается в расширении кинематических возможностей механизма за счет обеспечения движения первого рабочего органа по волнообразной кривой в сочетании с полуокружностью и вращения второго рабочего органа с периодическими, точными остановками. 6 з.п. ф-лы, 7 ил.
| RU 94016943 A1, 10.05.1996 | |||
| Рычажно-зубчатый планетарный механизм | 1989 |
|
SU1629649A1 |
| US 5547064 A, 20.08.1996 | |||
| Способ крепления наклонно-направленных скважин | 1986 |
|
SU1368425A1 |

