(54) ШАРНИРНО-РЫЧАЖНЫЙ МЕХАНИЗМ
| название | год | авторы | номер документа |
|---|---|---|---|
| ЗАМКНУТЫЙ ДИФФЕРЕНЦИАЛЬНЫЙ МЕХАНИЗМ ПРЕРЫВИСТОГО ДВИЖЕНИЯ | 2018 |
|
RU2694348C1 |
| КРИВОШИПНЫЙ МЕХАНИЗМ В.И. ПОЖБЕЛКО С ТОЧНЫМИ ОСТАНОВКАМИ | 2005 |
|
RU2283446C1 |
| РЫЧАЖНЫЙ МЕХАНИЗМ В.И. ПОЖБЕЛКО С ТОЧНЫМ ДЛИТЕЛЬНЫМ ВЫСТОЕМ | 2023 |
|
RU2836248C1 |
| Механизм верхнего двигателя ткани швейной машины | 1980 |
|
SU931850A1 |
| Зубчато-рычажное кулисное устройство с выстоем ведомого звена | 1975 |
|
SU539199A1 |
| КОМБИНИРОВАННЫЙ МЕХАНИЗМ СО СЛОЖНЫМ ДВИЖЕНИЕМ ВЫХОДНЫХ ЗВЕНЬЕВ | 2006 |
|
RU2331507C1 |
| Шарнирно-рычажный механизм | 1979 |
|
SU796573A1 |
| КРИВОШИПНО-ПОЛЗУННЫЙ МЕХАНИЗМ | 1996 |
|
RU2110718C1 |
| ШАРНИРНО-РЫЧАЖНЫЙ МЕХАНИЗМ С ВЫСТОЯМИ | 1991 |
|
RU2019767C1 |
| Конвейер с прерывистым движением тягового органа | 2017 |
|
RU2674383C1 |
1
Изобретение относится к машинестроению и може;; быть использовано в машинах-автоматах различных отраслей промышленности, в которых вращательное движение входного звена ;преобразуется во вращательное движение выходного звена с передаточным отношением, равным семи.
Известен шарнирно-рычажный Механизм, содержащий стойку, ведущую и ведомую четырехзвенные кинематические цепи кривьшипы-и короьФысла которых шарнирно связаны со стойкой, выходное звено ведомой четырехзвенной кинематической цепи выполнено в виде маховика, и промежуточную -кинематическую цепь til .
Недостатком этого механизма является отсутствие возможности получить передаточное отнсяиение, равное сеют, вследствие кинематических особенностей.
Цель изобретения - получение передаточного отношения, равного семи.
Указанная цель достигается тем, что промежуточная кинематическая цепь выполнена в виде двух диад, шарнирно связанных между собой, а механизм снабжен стержнем, шарнирно связывгиощим вторую диаду и коромисло ведомой четырехзвенной кинематической цепи.
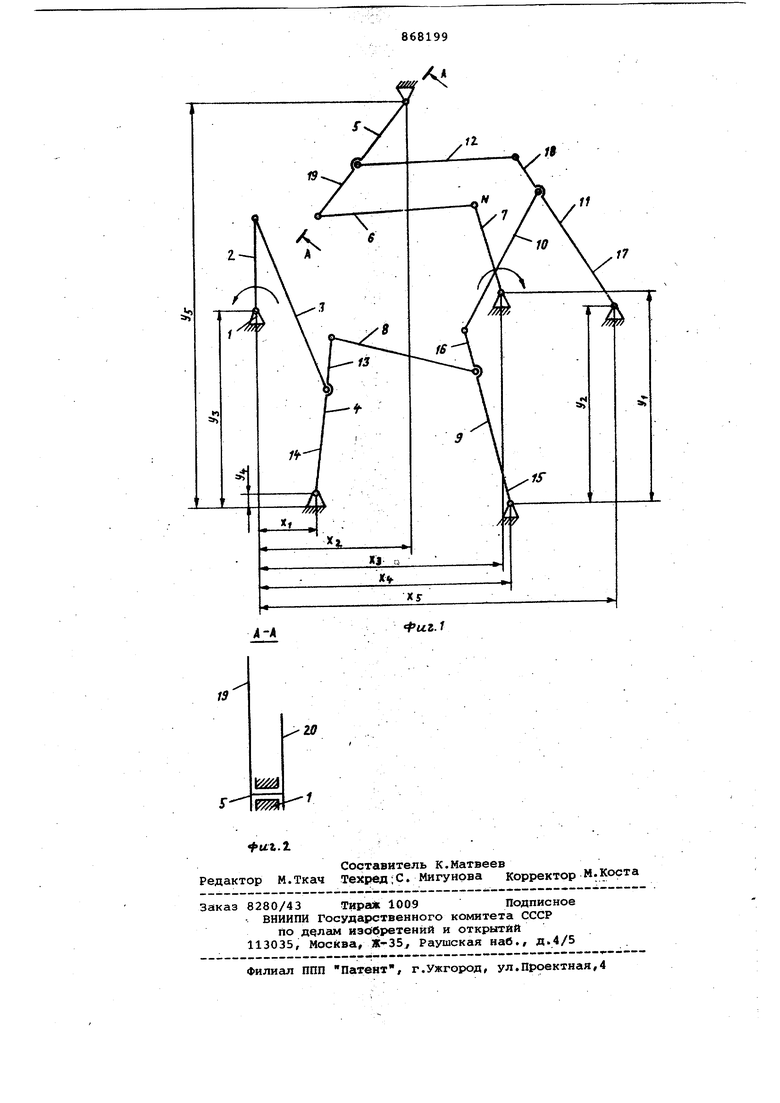
На фиг.1 изображена кинематическая схема шарнирно-рычажного механизма , на фиг.2 - сечение А-А на фиг.1.
Механизм содержит стойку 1, ведущую четырехзвенную кинематическую цепь, состоящую из стойки 1, кривошипа 2, шатуна 3, коромысла 4, и
10 ведомую четьчрехзвенную кинематическую цепь, состоящую из стойки 1, коромысла 5, шатуна 6, выходного звена 7, выполненного в виде маховика, кривошип 2 и короюдсло 5 шарнирно связаны со стойкой 1, промежуточную кинематическую цепь, выполненную в виде двух шарнирно связанных между собой ,диад, первая состоит из шатуна 8 и короишсла 9, вторая - из шатуна 10 и
20 корсилысла 11, шарнирно связанных между собой он снабжен стержнем 12, шарнирно связывакщим коромысло 11 второй диады и коромысло 5 ведомой четырехзвенной кинематической цепи.
25
Коромысло 4 состоит из жестко связанных между собой частей 13 и 14, коромысло 9 соётоит из жестко связанных между собой часзтей 15 и 16, коромысло 11 состоит из жестко свя30 .занных между собой частей 17 и 18. Коромысло 5 выполнено двойным из жес тко связанных между собой частей 19 и 20 и имеет с ними общую ось вращения. Часть 19 шарнирно соединяется со стержнем 12, а часть 20 шарнирно со.единяется с шатуном 6 ведомой четырехзвенной кинематической цепи. Шатун 3 шарнирно соединяется с ко ромыслом 4 в месте соединения частей 13 и 14/ шатун 8 шарнирно соединяетс с коромыслом 9 в месте соединения ча тей 15 и 16, шатун 10 шарнирно соеди няется с коромыслом 11 в месте соедй нения частей 17 и 18. Механизм (фиг.1) имеет следующие относительные размеры подвижных звеньев: кривошип 2 и выходное звено 7 1,0; шатун 3-2; часть 13 коромысла 4 - 0., часть 14 коромысла 4 1,085; часть 20 коромысла Б - 0,814/ часть 19 коромысла 5 - 1,525 шатун 6 - 1,983,- шатун 8 - 1,593; часть16 коромысла 9 - 0,54; часть 15 корю мысла 9 - 1.425, шатун 10 и стержень 12 - 1,695; часть 18 коромысла 11 0,44; часть 17 коромысла 11 - 1,475 Расстояния между опорами в относительных размерах: х- xj 1,644; ,678; х 4. 2,739; ,898 у 2,237; y,j 2,102; у 2,068; Ун 0,163; yj.4,271. Механизм работает следующим образом. При повороте кривошипа 2 на угол 237 коромысло 4 совершает два равных качательных движения, которые посредством шатуна 8 преобразуются в два неравных качательных движения коромысла 9. Два неровных качательных движения коромысла 9 посредством шатуна 10 преобразуются в два коротких и шесть длинных качательных движений коромысла 11. При этом одно короткое качательное движение имеет место в начале и одно - в конце цикла, а шесть длинных качательных движений - в середине цикла. Одно длинное качательное движение равно двум коротким. Качательные движения коромысла 11 преобразуются в четырнадцать качательных движений коромысла 5, выполненного из жестко связанных между собой частей 19 и 20. Посредством шатуна 6 четырнадцать качательных движений коромысла 5 преобразуются в сеть полньох оборотов выходного звена 7, выполненного в виде маховика. Предлагаемое устройство, состоящее из последовательно соединенных шарнирно-рычажных кинематических цепей, при повороте кривошипа на угол 2J позволяет получить поворот выходного звена на 7 оборотов. Формула изобретения Шарнирно-рычажный механизм, содержащий стойку, ведущую и ведомую четырехзвенные кинематические цепи, кривошипы и коромысла которых шарнирно связаны со стойкой, выходное звено ведомой четырехзвенной кинематической цепи выполнено в виде маховика, и промежуточную кинематическую цепь, отличающийся тем, что, с целью получения передаточного отношения, равного семи, промежуточная кинематическая цепь выполнена в виде двух диад, шарнирно связанных между собой, а механизм снабжен стержнем, шарнирно связывающим вторую диаду и коромысло ведомой четырехзвенной кинематической цепи. Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР по заявке 2719892/25-28, кл.Р 16 Н 21/12, 1979 (прототип).
