(54) УСТРОЙСТВО ДЛЯ ПЕРЕДАЧИ ИНФОРМАЦИИ ПРИ УЧЕТЕ ПЕРЕМЕЩАКадИХСЯ ИЗДЕЛИЙ

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для передачи информации при учете перемещающихся изделий | 1981 |
|
SU942114A1 |
| Устройство для передачи информации при учете перемещающихся изделий | 1982 |
|
SU1068957A2 |
| Устройство для передачи информации при учете перемещающихся изделий | 1976 |
|
SU616647A1 |
| Система управления устройством для маркирования | 1985 |
|
SU1242275A1 |
| Устройство для подсчета перемещающихся изделий | 1981 |
|
SU963021A1 |
| Устройство для подсчета перемещающихся изделий | 1983 |
|
SU1121687A2 |
| Устройство для управления загрузкой, выгрузкой и перемещением заготовок в кольцевой печи | 1989 |
|
SU1721420A1 |
| Устройство для учета предметов, перемещающихся по конвейеру | 1987 |
|
SU1444842A1 |
| ЦИФРОВАЯ КОММУТАЦИОННАЯ СИСТЕМА | 1994 |
|
RU2127025C1 |
| Система сбора и обработка данных для обслуживания торгового комплекса общественного питания | 1975 |
|
SU608164A1 |
Изобретение относится к информационным системам для передачи инфор мации о перемещающихся изделиях и может быть использовано при автоматизированном управлении технологиче кими процессами. По основному авт. св. 754462 известно устройство передачи информ ции при учете перемещающихся издели содержащее импульсный датчик переме щения изделий , датчик параметров из делий, блок регистров памяти, регис учета-снятых изделий, датчик загруз изделий по числу позиций загрузки, датчик окончания цикла, блок анализ блок управление и регистр сдвига, в полненный с равным числу регистров паиляти числом ячеек разрядов, вход первой из которых подключен к выходу импульсного датчика перемещения изделий, а выходы - соединены с управляющими последовательным переносом информации входами блока регистров памяти, первый вход блока управления подключен к выходу импульсного датчика перемещений, второй вход соединен с выходом регистра уч та снятых изделий, третий вход подключен к выходам каждого регистра r..,v.ro.u тготпоптнй пхоп соелинен с выходами датчиков загрузки и с первыми информационными входами регистров загрузки, входы которых подключены к датчику паргилетров изделий, первый вход блока управления соединен со входами слока регистров, управляющими параллельной записью ячеек разрядов регистра сдвига, второй вход блока управления подключен ко входу регистра учета снятых изделий, а первый вход блока анализа соединен с выходом датчика окончания цикла, второй вход подключен к выходу блока регистров памяти, а выход блока анализа соединен с пятым входом блока управления lU. В известном устройстве возможна потеря информации об изделии в случае, когда изделие, находясь на уборочном конвейере,поднято приемником рулонов и оставлено в таком положении, в то время как конвейер мо)кет сделать несколько шагов. В этом случае информсщия об изделии (рулоне) передвигается в регистре сдвига, не соответствуя фактическому местонахождению изделия на конвейере. Кро- , ме того, нет информации о том, находится ли данное изделие на конвейере или на приемнике изделия, так
как в соответствии с технологией транспортировки изделий на конвейер, изделие предварительно попадает на приемник, находящийся, в положении над конвейером, а затем, когда приемник занимает крайнее нижнее положение, изделие попадает на конвейер.
Цель изобретения - повышение надежности устройства в случае задержки транспортировки изделия, находящегося над уборочньам конвейером.
Это достигается тем, что в устройство для передачи информации введены по числу позиций загрузки регистры поднятых изделий и позиционные датчики,выходы которых-соединены с шестым входом блока управления,первый выход которого подключен к первым входам регистров поднятых изделий, выходы которых соединены со входами регистров памяти, соответствующих позициям загрузки, выходы которых подключены ко вторым входам регистров поднятых изделий.
Введение в предлагаемое устройств позиционных датчиков положения механизмов установки и регистров подняты рулонов позволяет повысить надежност устройства в случаях, когда изделие поднято над конвейером а конвейер совершает движение. Такая ситуация нередка в практике прокатного произвoдcfвa, когда например, отделяют изделия одного сортамента от другого, особенно при большом темпе прокатки или по другим причинам, когда необходимо увеличить расстояние между изделиями, устанавливаемь1ми на конвейере.
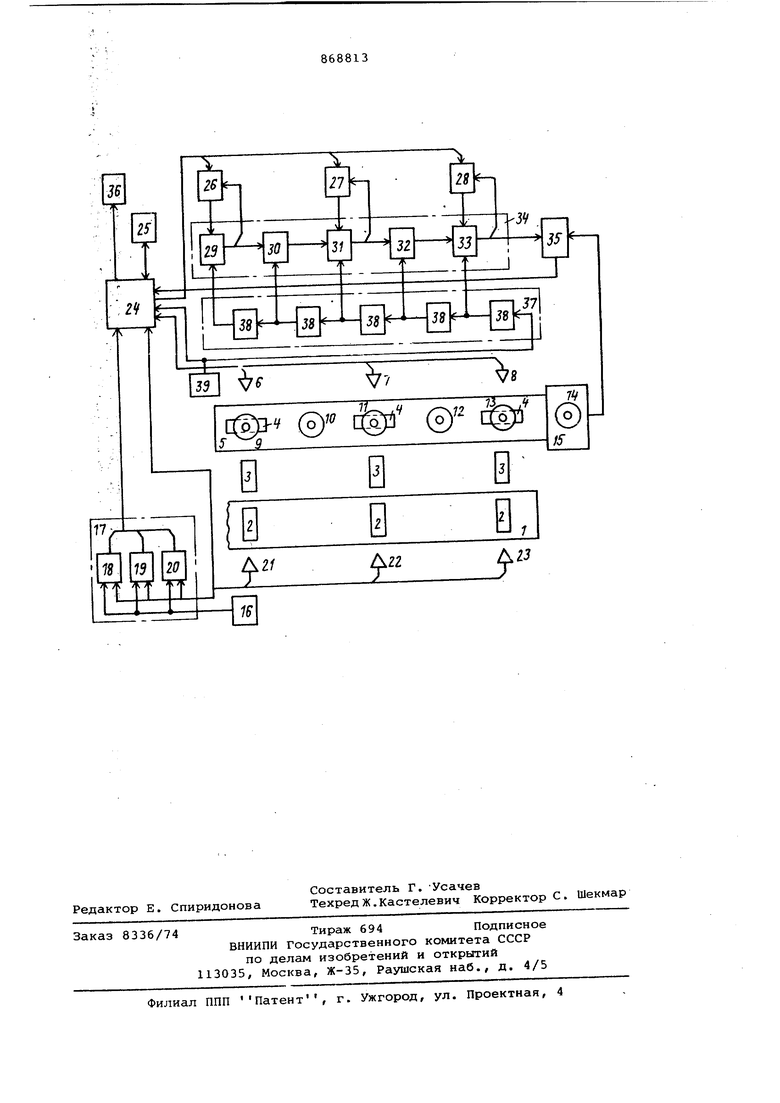
На чертеже изображена блок-схема устройства для передачи информации при. учете перемещающихся изделий.
Она состоит из линии 1 подачи(отводшцей рольганг), механизмов 2 останова (моталки), механизмов 3 загрузки (кантователя) , механизмов -4 установки изделия (приемника рулонов) , линии 5 уборки (конвейера), позиционных датчиков 6-8, мест нахождения рулонов на линии уборки 9-13 из них на позиции 9-11,13 рулоны устанавливаются при опускании механизма 4 установки изделия, на который при его нахождении в верхнем положении,механизмом 3 разгрузки торцом устанавливается рулон после окончания смотки, позиции 14 выхода рулонов с линии уборки, датчика 15 окончания цикла, датчика 16 параметров изделий, блока 17 регистров загрузки, содержащего регистры 18,19 и 20, датчиков 21,22 и 23 загрузкиt блока 24 управления. Первый выход блока 24 управления соединен с входом регистра 25 учета снятых изделий. Второй выход блока 24 управления соединен с первыми входами регистров 26, 27 и 28 подл - т-чдгтпм памяти 29,
30,31,32 и 33, образующие блок 34 памяти. Выходы регистров 26,27 и 28 соединены с первыми входами регистров 29, 31 и 33 памяти соответственно. Выход регистра 29 памяти соедиJ нен со вторым информационным входом регистра 26 поднятых изделий и первым информационным входом регистра 30 памяти, выход которого соединен с первым информационным входом реQ гистра 31 памяти, выход которого соединен со вторым информационным входом регистра 27 поднятых изделий и первым информационным входом регистра 32 памяти, выход кот эрого соединен с первым информационным входом регистра 33 памяти, выход которого соединен с информационным входом регистра 28 поднятых изделий и вторым входом блока 35 анализа, первый вход которого соединен с выходом
0 датчика 15 окончания цикла, а выход с пятым входе блока 24 управления, третий выход которого соединен со входом исполнительного блока 36. Регистр 37 сдвига состоит из пяти
5 ячеек разрядов 38, соединенных последовательно. Вход регистра 37 сдвига, совпадгиощий со входом первой ячейки 38, соединен с выходом импульсного датчика 39 перемещения изделий
и первым входом блока 24 управления.
Датчик 16 параметров изделия вклю-, чает в себя комплекс информационноизмерительных средств прокатного стана, например, измерители толщины, ширины, длины, температуры проката,
вычислитель теоретического веса,
комплекс средств ввода технологической информации об изделиях, например, номер партии, плавки, заказа, марки стали, номера смены и др. Информация на выходе этого датчика представлена в цифровом виде.
Блок 17 регистров загрузки предназначен для записи, а также хранения информации, поступающей от датчика 16 параметров изделий и состоит из трех многоразрядных регистров 18-20 с выходной логикой, первые входы каждого из них. соединены с вьисодом датчика 16 параметров издеQ ЛИЙ, вторые входы каждого из них соединены с соответствующим выходом датчиков 21-33 загрузки и четвертым входом блока 24 управления.
Датчики 21-24 загрузки фиксируют 5 наличие полосы в местах загрузки (в нашем случае - это наличие полосы и окончание смотки в механизмах 2) и представляют собой преобразователи статического тока, реагирующие на 0 величину тока нагрузки электропривода механизмов 2 при сматывании полосы в рулон.
Блок 24 управления состоит из генератора тактов, набора триггеров, 5 элементов И и предназначен для выполнения следующих операций: приема и обработки информации от датчиков 21-23 загрузки; приема и обработки информации от позиционных датчиков 8; формирования сигналов переписи из регистров 18,19 и 20 в регистры 26,27 и 28 поднятых изделий; формирования сигналов переписи из регистров 26,27 и 28 поднятых изделий в регистры 29,31 и 33 памяти соответственно; формирования сигналов переписи из регистров 29,31 и 33 памяти в регистры 26,27 и 28 поднятых изделий соответственно; приема и обработки сигналов от импульсного датчика 39 перемещения изделий, блока 17 регистров загрузки, регистра 25 учета снятых изделий, блока 35 анализа
Исполнительный блок 36 предназначен для управления печатью и состоит из печатающего устройства, например телетайпа памяти, схемы дешифрации кода и схемы управления печатью
Импульсный датчик 39 перемещечия изделий связан с линией 5 уборки и вьдает тактовые импульсы шаг конвейера окончен . Выход импульсного датчика 39 перемещения подключен к первому входу блока 24 управления и ко входу регистра 37 сдвига.
Регистр 37 сдвига предназначен для формирования серии последовательных импульсов, в совокупности обеспечивающих перенос информации, содержгидийся в регистрах 29-33 памяти, на один шаг ближе к выходу устройства Регистр J7 сдвига состоит из разрядов 38, количество котоЕялх равно числу регистров 29-33 памяти, вход первого из которых йодключен к выходу импульсного датчика 39 перемещений, а выходы которых подключены к управляющим переносом информации входам регистров 29-33 памяти последовательно в таком порядке, что первая ячейка 38 регистр 37 сдвига соединена с последним регистром 33 памяти блока 34 памяти а последний ячейка 38 - с первым регистром 29 блок 34 памяти.
Блок 34 памяти состоит из-пяти многоразрядных регистров памяти, соединенных последовательно и имеющих входную логику. Каждый регистр 29-33 памяти соответствует месту установки 9-13 изделия на конвейере 5, т.е. является идентификатором изделия. Выход последнего регистра 33 памяти соединен со вторым входом блока 35 анализа.
Блок 35 анализа состоит из набора триггеров, регистров, схем совпадения и предназначен для анализа сигналов и информации, поступающей от регистра 33 Пс1мяти и датчика 15 окончания цикла, выход которого подсоединен к первому входу блока 35 анализа.
Датчик 15 окончания цикла фиксирует наличие изделия в конце зоны слежения и представляет собой в данном случае весы, которые вьадают сигнал о наличии рутюна и информацию о его весе.
Регистр 25 учета снятых изделий предназначен для хранения информации о снятом рулоне и представляет собой снегоразрядный регистр со входной логикой.
0
Позиционные датчики 6-8 положения механизмов уборки представляют собой путевые выключатели, которые срабатывают при достижении приемниками рулонов крайнего верхнего и нижнего
5 положения,.
Регистры 26,27 и 28 поднятых изделий предназначены для хранения информации 6 поднятом на приемнике .рулоне и представляет собой регистры
0 с входной логикой аналогичные регистрам 29-33 памяти.
При описании работы устройства приняты следующие обозначения: логическая единица - сигнал наличия сигнал от позиционных датчиков 6-8
5 о нахождении приемника рулонсма в крайнем верхнем положении, сигнал от датчиков 21-33 загрузки о наличие полосы в мотсшке, нгшичие информации в регистрах 18-28, 26-28,
0 29-33 и рулона на весах); логический нуль - отсутствие вышеперечисленной информации.
В процессе прокатки полоса движется по линии 1 подачи 3, попадает
5 в один из механизмов 2 и сматывается в рулон. Начало смотки фиксируется одним из датчиков 21-23 загрузки, который переходит из логического нуля в единицу и информация о поло0се записывается в соответствующий регистр 18-20 блока 17 регистров загрузки. По окончании смотки (соответствующий датчик 21-23 загрузки переходит из логической единицы в ноль рулон с помощью механизма раз5грузки устанавливается на поднятый приемник рулонов (соответствукидий позиционный датчик 6-8 переходит из логического нуля в единицу и блок 24 управления выдает сигнал на перепись
0 информации из регистров 18-20 в соответствукидие регистры 26-28 поднятых изделий.
При опускании приемника рулонов 5 вниз (соответствукнций позиционный датчик 6-8 переходит из логической единицы в ноль) и установки рулона на соответствующее установочное место 9,11 и 13 конвейера 5, блок 24 0 управления выдает сигнал на перепись информации из регистра 26,26,28 поднятых рулонов в регистры 29,31,33 памяти соответственно. При осуществлении конвейером 5 шага, сигнал 5 шаг конвейера окончен поступает
с выхода импульсного датчика 39 перемещения в регистр 37 сдвига, который формирует серию последовательных импульсов, обеспечивающих перенос содержащейся в регистрах 29-33 памяти информации на один шаг ближе .к выходу устройства последовательно, начиная с последнего регистра 33 памяти. При наличии в регистре информации, последняя передается в регист блока 35 анализа, при этом рулон, находящийся на позиции 13, поступает на позицию 14 выхода рулона.
При поступлении очередной полосы, которая,может сматываться любой свободной моталкой, алгоритм функционирования аналогичен,.
После поступления рулона на позицию 14 выхода рулона, в блоке 35 анализа происходит анализ состояния датчика 15 окончания цикла (есть инфор.мация о фактическом весе рулона или рет) и информации, принятой из регистра 33 памяти. При этом возможны следующие ситуации.
Сигнал от датчика 15 окончания цикла есть, информация в регистре блока 35 анализа есть, в этом случае вьвдается сигнал с блока 24 управлени на перепись информации из блока 35 анализа в исполнительный блок 36 и ее регистрацию.
Сигнала от датчика нет,информации в регистре блока 35 анализа нет - в этом случае регистрация не производится.
Сигнала от датчика нет, информация в регистре блока 35 анализа есть в этом случае выдается сигнал на перепись информации из регистра блока 35 анализа в регистр 25 учета снятых изделий, а это значит, что рулон с данного места снят.
Сигнал от датчика есть, информации в регистре блока 35 анализа нет, в этом случае выдается сигнал в блок 24 управления на передачу информации которая содержится в регистре 25 учета снятых изделий в исполнительны блок 36 и ее регистрацию, а это значит, что снятый рулон был поставлен на свободное установочное место.
В случае, когда рулон, находясь на уборочном конвейере, поднят приемником рулонов и оставлен в таком положении, в то время как конвейер делает несколько шагов (соответствующий позиционный датчик 6-8 переходит из логического нуля в единицу) и при наличии информации в регистрах
29,31,33 памяти блок 24 управления выдает сигнал на перепись информации из регистров 29,31,33 памяти в регистры 26,27,28 поднятых изделий соответственно. При опускании рулон вниз (соответствующий позиционный датчик 6-8 переходит из логической единицы в нуль), блок 24 управления вьщает сигнал на перепись информаци из регистров 26-28 поднятых рулонов в регистры 29,31,33 памяти соответственно.
Из рассмотрения алгоритма работы следует, что устройство для передачи информации при учете перемещающися изделий выполняет свои функции слежения за изделиями в условиях их произвольного поступления на линию слежения, а также при снятии и возврате изделия на любое свободное установочное место линии слежения и не перепутывает их. Кроме того, устройство обеспечивает сохранение информации о изделии в случае, когда изделие, находясь на уборочном конвейере, поднято приемником рулонов и оставлено в таком положении, в то время, как конвейер может сделать несколько шагов.
Наличие в устройстве позиционных датчиков положения механизмов установки изделия на уборочный конвейер и регистров поднятых изделий позволяет повысить надежность передачи информации.
Формула изобретения
Устройство для .передачи инфорадаци при учете перемещающихся изделий по авт. св. № 754462, отличающ е е с я тем, что, с целью повьлиения надежности устройства в него введены по числу позиций загрузки регистры поднятьох изделий и позиционные датчики, выходы которых соединены с шестым входом блока управления, первый выход которого подключен к первьм входам регистров поднятых изделий, выхода которых соединены со входами регист юв памяти, соответствующих позициям загрузки, выходы которых подключены ко вторым входам регистров поднятых изделий.
Источники информации, принятые во внимание при экспертизе
