(5) УСТРОЙСТВО ДЛЯ ПЕРЕДАЧИ ИНФОРМАЦИИ ПРИ УЧЕТЕ ПЕРЕМЕЩАЮЩИХСЯ ИЗДЕЛИЙ

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для передачи информации при учете перемещающихся изделий | 1979 |
|
SU868813A2 |
| Устройство для передачи информации при учете перемещающихся изделий | 1982 |
|
SU1068957A2 |
| Устройство для передачи информации при учете перемещающихся изделий | 1976 |
|
SU616647A1 |
| Устройство для сопровождения рулонов | 1975 |
|
SU564017A1 |
| Устройство для подсчета перемещающихся изделий | 1983 |
|
SU1121687A2 |
| Устройство для подсчета перемещающихся изделий | 1981 |
|
SU963021A1 |
| Устройство автоматического управления автоматом для укладки кирпича | 1988 |
|
SU1648779A1 |
| Устройство управления автоматом для укладки кирпича | 1990 |
|
SU1726265A1 |
| Система управления разгрузочным устройством | 1987 |
|
SU1424895A1 |
| Устройство для счета предметов,переносимых конвейером | 1982 |
|
SU1072076A1 |
1
Изобретение относится к ийформационным системам для передами информации о перемещаемых изделиях на широкополосных станах горячей (ШСГП) прокатки и может быть использовано в других отраслях промышленности при автоматическом учете перемещаемых изделий.
Известно устройство для передачи информации при учете перемещающихся изделий, содержащее импульсный датчик перемещения изделий, датчик параметров изделий, блок управления, блок регистров памяти, регистр сдвига, регистр учета снятых изделий, датчик загрузки изделий, блок регистров загрузки, датчики наличия изделий на участке передачи информации l.
Наиболее близким к предлагаемому является устройство для передачи информации при учете перемещающихся изделий, содержащее импульсный датчик перемещения изделий, датчик параметров изделий, блок памяти, регистр учета снятых изделий,датчик загрузки изделий по числу позиций загрузки, блок регистров загрузки, датчик окончания цикла, блок анализа, блок уп равления, регистры поднятых рулонов, количество которых соответствует числу позиций загрузки, регистр сдвига, выполненный с равным числу регист д ров памяти числом ячеек разрядов, вход первой из которых подключен к выходу импульсного датчика перемещения изделий, а выходы соединены с управляющими последовательным п ре}j носом информации входами регистров блока памяти, первый вход блока управления подключен к выходу импульсного датчика перемещений, второй вход соединен с выходом регистра учета
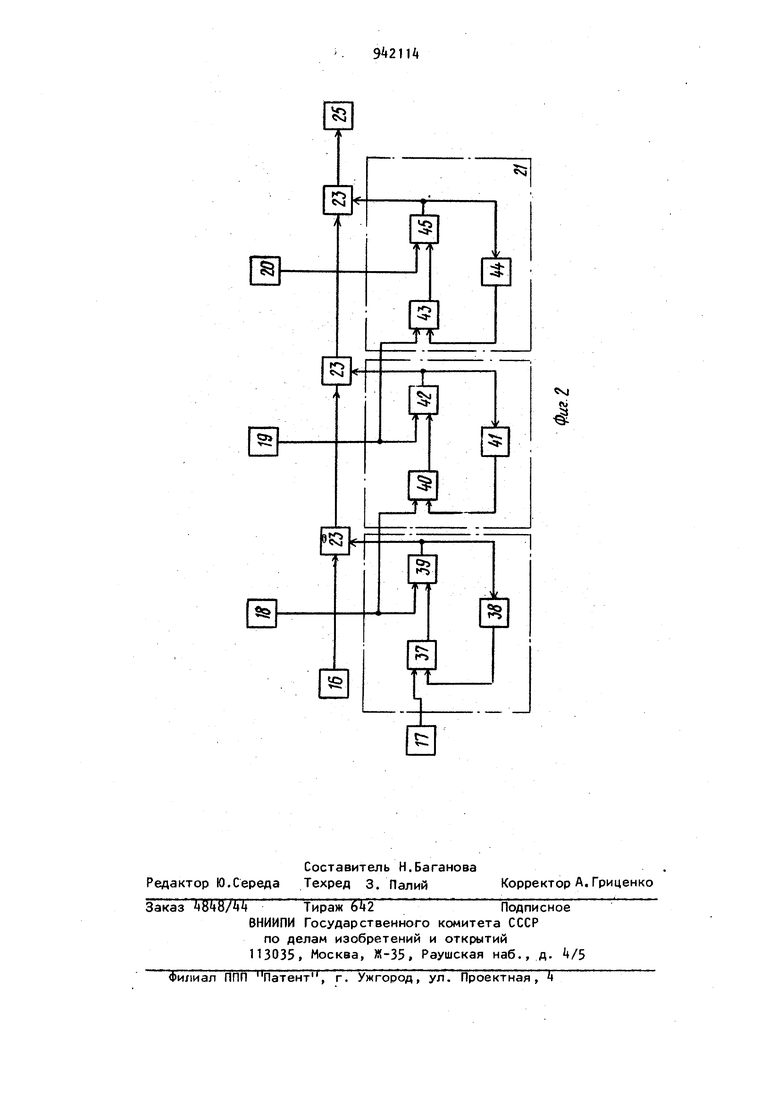
20 снятых изделий, третий вход подключен к выходам каждого регистра загрузки , четвертый вход соединен с выходами датчиков загрузки, вторые входы которых Подключены к датчику параметров изделий, первый вход блока управления подключен ко входу регистра учета снятых изделий, а первый вход блока анализа соединен с выходом датчика окончания цикла, второй вход подключен к выходу блока памяти, выход блока анализа соединен с пятым входом блока управления, первые входы регистров поднятых рулонов соединены со вторым выходом блока управления, вторые входы соединены с выходами регистров блока памяти, соответствующих позициям загруз ки, а выходы - со вторыми информационными входами соответствующих регист-1(5 ров блока памяти, шестой вход блока управления соединен с выходами позиционных датчиков положения механизмов установки 2. Применение известного устройства для учета перемещающихся изделий на моТалках широкополосных станов горячей прокатки СШСГП показало, что оно имеет недостаточную надежность передачи информации. В извест ном устройстве отсутствуют позиционные датчи ки положения механизмов, транспортирующих рулон от моталки к приемнику рулонов, а именно: тележ ки съемника, кантователя рулонов и передаточной тележки кантова ля рулонов, которые входят в уборочную группу оборудования ШСГП. Отсутствие указанных датчиков может привести к снижению надежности передачи ин формации, например, при высоком темпе прокатки, когда почти на всех транспортирующих механизмах находятся рулоны и одновременно на моталку принимается очередная полоса. Отсутствие в известном устройстве регистров для хранения информации о транспортируемом указанными механизмами рулоне, также снижает надежность передачи информации при нарушениях естественного порядка последо вательности включения механизмов транспортировки рулонов: тележка съе ника - кантователь- передаточная тележка кантователя. Указанные недостатки снижают надежность передачи информации известным устройством. Цель изобретения - повышение надежности передачи информации. Указанная цель достигается тем, что устройство для передачи информации при учете перемещающихся изделий содержащее датчики загрузки, выход 9 4 каждого из которых подключен к входу соответствующего регистра загруз ки, первый выход которого соединен с датчиком параметров изделий, датчик окончания цикла подключен к первому входу блока анализа, второй вход которого соединен с выходом блока памяти, выполненного на последовательно соединенных регистрах, выход блока анализа подключен к первому входу блока управления, второй вход которого соединен с датчиками положения приемника изделий, третий вход блока управления подключен к датчику перемещения конвейера, который соединен С входами регистров блока памяти, первый выход блока управления подключен к блоку регистрации, второй выход - к первым входам регистров поднятых изделий, число которых соответствует числу линий загрузки, вторые входы которых соединены с выходами соответствующих регистров блока памяти, число которых соответствует числу мест конвейера, выходы всех регистров поднятых изделий соединены с информационными входами соответствующего регистра блока памяти, регистр учета снятых изделий подключен к блоку управления, в него введены по числу линий загрузки блок контроля, дополнительные датчики положения и блок последовательно соединенных регистров положения, число которых равно числу дополнительных датчиков положения, выходы которых и выход датчика загрузки подключены к входу блока контроля, выход которого соединен с управляющими входами блока регистров положения, выход которого подключен к четвертому входу блока управления, а вход к второму выходу регистра загрузки. Блок контроля содержит по числу дополнительных датчиков ячейки, каждая из которых состоит из триггера, элемента И и линии задержки, выход триггера каждой ячейки подключен к первому входу элемента И, выход которого через линию задержки соединен с первым входом триггера своей ячейки, вторые входы триггера всех ячеек и второй вход элемента И всех ячеек подключен к соответствующему выходу блока контроля, входы которого соединены с выходом элемента И соответствующих ячеек. На фиг. 1 представлена блок-схема устройства ; на фиг. 2- схема блока контроля. 5 На фиг. 1 показаны полоса 1, моталки 2, тележки-съемники 3 рулонов кантователь k изделий (рулонов), пе редаточные тележки 5 кантователя k изделий (рулонов), приемники 6 изделий (рулонов), уборочный конвейер 7 изделий (рулонов), с местами 8-12 расположения, место 13 окончания цик ла, датчик lA окончания цикла, датчик 15 параметров изделия, регистры 16 загрузки, датчики 17 загрузки (мо талок) , дополнительные датчики положения (транспортирунхцих изделие механизмов); 18 - тележек и съемников изделий (рулонов), 19 - полбжения кантователей изделий (рулонов), 20 - передаточных тележек кантователей изделий (рулонов, блоки 21 контроля, блоки 22 регистров положения, содержащие три регистра 23, каждый из которых соответствует дат чикам 18-20 в каждой линии загрузки, датчики 2k положения приемника изделий (рулонов) , блок 25 управления, блок 26 регистрации, регистр 27учета снятых изделий, регистры 28поднятых изделий (рулонов), блок 29памяти, содержащий пять регистров 30-3 по числу мест на уборочном конвейере 7 блок 35 анализа и датчик 36 перемщений конвейера. Блок 21 контроля содержит первый уст новочный триггер 37, первую линию 38 задержки и первый элемент И 39 входящие в первую ячейку второй уста новочный триггер 0, вторую линию задержки k и второй элемент И 2, входящие во вторую ячейку, и третий установочный триггер 3, третью линию 7 задержки и элемент И 5, вхо дящие в третью ячейку. На чертеже показаны три линии загрузки А6-48. Причем выходы датчиков 17 загрузки изделий соединены с первыми входами соответствующих позициям загрузки регистров 16 загру ки, вторые входы которых соединены с выходом датчика 15 параметров изделий, выход датчика 36 перемещений изделия соединен с первым входом бло ка 25 управления, и с управляющими последовательным переносом информации входами регистров 30-З блока 29 памяти, выход регистра 27 учета сня тых изделий соединен со вторым входо блока 25 управления, первый вход которого соединен со входом регистра 27, второй вход - с первыми входакм регистров 28 поднятых изделий, рые входы которых по отдельности соединены с выходами регистров 30, 32 и З блока 29 памяти, а выходы - с информационными входами регистров 30, 32,и З каиадого в отдельности, пятый вход блока 25 соединен с выхот дом блока 35 анализа, первый вход которого соединен с выходом датчика окончания цикла, а второй - с выходом блока 29, регистры 30-3 которого соединены последовательно так, что выход регистра 30 соединен с информационным входом регистра 31, выход регистра 31 - с информационным входом регистра 32, выход регистра 32 - с информационным входом регистра 33, выход регистра 33 с информационным входом 0егистра 3, выход которого является выходом блока 29, в каждой линии загрузки выходы датчиков 18, 17 и 20 соответственно соединены со входами блоков 21 контроля, выходы которых соответственно соединены с управляющими переносом информации входами регистров 23 блоков 22 контроля, регистры -23 которых последовательно соединены так, что выход первого регистра 23 соединен с информационным входом второго регистра 23, выход второго регистра 23 соединен с информационный входом третьего регистра 23. Выходы последних регистров 23, являющиеся выходами блоков 22, соответственно соединены с третьим входом блока 25, входы первых регистров 23 блока 22 соответственно соединены с выходами регистров 16, выходы датчиков 2k положения приемника изделий (рулонов) соответственно соединены с четвертым входом блока 25, единичный вход триггера 37 соединен с выходом датчика 17, нулевой вход - с выходом линии 38 задержки, вход которой соединен с выходом элемента И 39 и управляющим переносом информации входом первого регистра 23 блока 22, первый вход элемента И 39 соединен с единичным входом триггера 37, второй вход - с выходом датчика 18 положения тележки-съемника и единичным входом триггера 0, нулевой вход котс ого соединен с выходом линии 41 3 эдержки, вход которой.соединен с выходом элемента И (2 и управляющим переносом информации входом второго регистра 23 блока 22, первый вход элемента И k2 соединен с единичным выходом триггера kQ, второй вход 7с выходом датчика 19 положения кантователя изделий (рулонов) и единичным входом триггера 43, нулевой вход которого соединен с выходо линии задержки, вход которой сое динен с выходом элемента И 45 и управляющим переносом информации входом третьего триггера 23 блока 22, первый вход элемента И kS соединен с единичным выходом триггера 3, а второй вход - с выходом датчика 2 положения передаточной тележки кантователя изделий (рулонов). На конвейере 7 имеется пять мест 8-12, на которых могут быть располо жены изделия (рулоны). В соответствии с числом мест 8-12 на конвейе ре в блоке 29 памяти содержится пят регистров 30-3, причем регистр 30 соответствует первой позиции загруз ки (место 8), регистр 32 соответств ет второй позиции загрузки (место Ю регистр З соответствует третьей по зиции загрузки (место 12), причем на места 8, 10 и 12 изделия (рулоны устанавливаются с помощью приемнико 6 изделий (рулонов). Конвейер 7 передвигается шагами так, что с каждым шагом изделия (ру лоны) перемещаются с места 8 на мес то 9, с места 9 на место 10 i т.д. до места 13, где цикл завершается. Датчик 15 параметров изделия может представлять собой комплекс информационно-измерительных устройств с помощью которых собирается необходимая информация для получения сертификата прокатываемой полосы, содержащего например, информацию о сортаменте, длине, температуре, полосы и т.п. Регистры 16 загрузки предназначены для записи, хранения и передачи в блоки 22 информации, поступающей на перв.ые входы каждого из регистров 16 от датчика 15. Вторые входы каждого из регистров 16 соответственно соединены с выходами дат чиков 17 загрузки. Датчики 17 загрузки фиксируют начало и окончание смотки полосы моталками 2 и могут представлять собой преобразователи статического тока, реагирующие на изменение тока нагрузки электроприводов моталок 2, возникающее при намотке полосы 1. Датчики 18 положения тележек-съе ников 3 представляют собой реле, дающее сигнал логической единицы 48 (1) в положении, когда с помощью тележки-съемника 3 изделие (рулон) снято с моталки 2 и нуль ( в исходном состоянии. Датчики 19 положения кантователя изделий (рулонов) представляют собой реле, дающее сигнал 1 в положении, когда кантователь Ц скантует изделие (рулон), принятый от тележкисъемника 3, и О - в исходном состоянии. Датчики 20 положения передаточной тележки 5 приемника изделия (рулонов) представляют собой реле, дающее сигнал 1 в положении, когда те лежка 5 перевезет изделие (рулон) в сечение приемника 6 рулонов и О в исходном состоянии. Датчики 2k положения приемника изделия (рулонов) 6 вырабатывают сигнал 1 при подъеме приемника изделия (рулонов) 6 вверх для приемки изделия (рулона) с тележки 5 и О в исходном состоянии, т.е. внизу. Датчик 14 окончания цикла может представлять собой весы, которыми, как правило, оснащены уборочные конвейеры ШСГП, Датчик 36 перемещений фиксирует совершение шага конвейером 7, выдавая при этом сигнал Шаг конвейера окончен (ШКО). Блок 25 управления представляет собой цифровое устройство, содержащее, например триггеры, регистры, элементы И и др. элементы, и который в соответствии с каждой позицией загрузки: принимает информацию от блоков 21 контроля, соответственно переписывает информацию из третьего регистра 23 в один из регистров 28, поднятых изделий (рулонов); принимает и обрабатывает сигналы, поступающие от датчика 24 положения приемников изделия (рулонов)идатчика Зб перемещений, обрабатывает информацию, поступающую от блока 35 анализа , организуют запись информации в регистр 27 снятых изделий ( рулонов и прием информации от него. Блок 35 содержит триггеры, регистры и элементы И и предназначен для анализа сигналов и информации, соответственно поступающей от датчика 14 окончания цикла и блока 29 памяти. Регистр 27 учета снятых изделий (рулонов) предназначен для хранения информации о снятом по каким-либо причинам изделии рулоне j и представ9ляет собой регистр со входной логикой. Блок 26 регистрации служит для р печатки сертификата изделия (рулона и может представлять собой, например телетайп. Устройство работает следующим об разом. Полоса 1 наматывается на одну из моталок 2jj например на моталку в первой позиции загрузки. По сигна лу датчика 17, поступающему в регис 16, информация о полосе из датчика 15переписывается в регистр 16, одновременно этим же сигналом, поСтупающим на вход блока 21, взводится триггер 37, единица на выходе которого поступает на первый вход эле мента И 39, когда тележка-съемник 3 изделия (рулона) снимет его с мо талки 2, на выходе датчика 18 полож ния тележки 3 появляется 1, которая поступает на второй вход элемента И 39 на выходе последнего по является 1, которая поступает на управляющий переносом информации вх первого регистра 23 блока 22, в результате чего информация из регистр 16переписывается в первый регистр 23, одновременно 1 с выхода элеме та И 39 поступает на вход линии 38 задержки, которая спустя выбранное время задержки сбрасы.вает триггер 37. Одновременно 1 с выхода датчика 18 взводит триггер ДО. При срабатывании кантователя k изделий (рулонов)датчик 19 положения кантователя вырабатывает 1, поступающу на второй вход элемента И 2, на пе вом входе которого уже присутствует 1 с выхода триггера kO, 1 с выхода элемента И +2 поступает на управляющий переносом информации вт рой регистр 23 блока 22, в результа те чего информация из первого регис ра 23 переписывается во второй регистр 23, линию 41 задержки, на вхо которой также поступает 1 с элемента k2 и сбрасывает триггер 0. При срабатывании датчика 19 взводит ся также триггер При срабатываНИИ передаточной тележки 5 кантователя датчик 20 положения передаточной тележки 5 вырабатывает 1, которая поступает на второй вход элемента И tS, на первом входе-которого уже присутствует 1 с выхода триггера 43, 1 с выхода элемента И 45 поступает на вход третьего peЦ10гистра 23 блока переписывается информация из второго регистра 23 блока 22. При срабатывании приемника 6, т.е. при подъеме его вверх для снятия изделия (рулона) с перед;аточной тележки 5, 1 с датчика 24 поступает на четвертый вход блока 25 управления. После прихода 1 в блок 25, что соответствует верхнему положению приемника изделия (рулонов), блок 25 переписывает информацию из блока 22 в первый регистр 28поднятых изделий (рулонов).При опускании изделия (рулона)на конвейер7 сигнал О с датчика 24 поступает на четвертый вход блока 26, вырабатывающего сигнал , по которому информация из первого регистра 28 переписывается в регистр 30 блока 29памяти. После опускания рулона на конвейер 7, последний совершает шаг, что фиксируется датчиком Зб перемещений. Сигнал с датчика 36 поступает на управляющие переносом информации входы регистров блока 29. Информация, содержащаяся в каждом регистре последовательно переписывается из регистра 30 в регистр 31, из регистра 31 в регистр 32, из регистра 33 в регистр З, а из регистра 34 в блок 35 анализаI После поступления изделия (рулона) в место 13 взвешивания, срабатывает датчик окончания цикла, и на первый вход блока 35 поступает цифровая информация о массе изделия (рулона). При этом возможны следующие ситуации, сигнал от датчика 15 есть, информация в блоке 35 есть, тогда блок 35 выдает сигнал в блок 25, по которому последний выдает информацию об изделии (рулоне) для регистрации ее блоком 26, печатащим сертификат изделия ( рулона) ; сигнала от датчика 14 нет, а информация в блоке. 35 есть, тогда блок 35 выдает в блок 25 сигнал, по которому информация из блока 35 переписывается в регистр 27 учета снятых изделий рулонов, что свидетельствует о том, что изделие (рулон) ,с данной информацией снято с конвейера 7, сигнал датчика есть, информация в блоке 35 есть-, тогда в блок .5 выдается сигнал на передачу информации, которая содержится в регистре 27 учета снятых изделий (рулонов) в блок 26 для печатс1ния сертификата изделия (рулона), что означает снятое изделие ( рулон) ставится на :свободимое место ксэнвейера 7. В случае, ко да изделие (рулон, находясь на убо рочном конвейере 7, поднимается при емником 6 и оставляется в таком поло жении, в то время как конвейер дела несколько шагов (соответствующий дат чик 2 положения приемника изделия (рулона) находится в 1) и при нали чии информации в соответствующем ре гистре, например 30, блок 25 выдает сигнал, по которому информация из регистра 30 переписывается в соответ ствующий ему регистр 28 поднятых из делий (рулонов)и хранится в нем до тех пор, пока приемник изделия (рулонов не опускает его вниз на конвейер. Рассмотрим случай нерегламентного включения какого-либо транспорти рующего механизма. Пусть смотанное изделие (рулон) находится на кантователе Ц изделия (рулонов). При этом кантователь k находится в исходном состоянии и на выходе датчика 19 положения кантователя присутствует О Предположим, что оператор включает передаточную тележку 5 кантователя с целью проверки ее работы. В этом случае нет перестановки изделия (рулона) с кантователя на передаточную тележку 5, для того чтдзбы обеспечить блокировку передвижки информации из второго регистра 23 в третий регистр 23, О с выхода датчика 19 положения приемника изделия (рулонов) блокирует элемент И kS, на выходе которого также О, который поступает на управляющий переносом информации вход третьего регистра 23, запрещая перепись информации из предыдущего регистра. Аналогичная блокировка передвижения информации происходит в любом случае если не срабатывает любой механикам транспортировки изделий (рулонов) в необходимой для транспортировки изделий (рулонов) последовательности моталка-тележка - съемника кантоаатель - передаточная тележка. Для кащой новой полосы алгоритм функционирования устройства такой же Таким образом, предлагаемое устройство для передачи информации выполняет функции слежения за перемещением изделия в УСЛОВИЯХ, когда происходит нарушение естественного порядка включения транспортирующих механизмов, какие нередко возникают на МСГП, что повьйиает надежность пеU12редачи информации при учете перемещаемых изделий, что достигается за счет введения блоков контроля. Формула изобретения 1. Устройство для передачи информации при учете перемещающихся изделий, содержащее датчики загрузки, выход каждого из которых подключен к входу соответствующего регистра загрузки, первый выхсд которого соединен с датчиком параметров изделий, датчик окончания цикла подключен к первому входу блока анализа, второй вход которого соединен с выходом блока памяти, выполненного на последовательно соединенных регистрах выход блока анализа подключен к первому входу блока управления, второй вход которого соединен с датчиками положения приемника изделий, третий вход блока управления подключен к датчику перемещения конвейера, который соединен с входами регистров блока памяти, первый выход блока управления подключен к блоку регистрации, второй выход - к первым входам регистров поднятых изделий, число которых соответствует числу линий загрузки, вторые входы которых соединены с выходами соответствующих регистров блока Памяти, число которых соответствует числу мест конвейера, выходы всех регистров поднятых изделий соединены с информационными входами соответствующего регистра блока памяти, регистр учета снятых изделий подключен к блоку управления, отличающееся тем, что, с целью повышения надежности передачи информации, в него введены по числу линии загр1узки блок контроля, дополнительные датчики положения и блок последовательно соединенных регистров положения, число которых равно числу дополнительных датчиков положения, выходы которых и выход датчика загрузки подключены к входу блока контроля, выход которого соединен с управляющими входами блока регистров положения, выход которого подключен к четвертому входу блока управления, а вход - к второму выходу регистра загрузки. 2. Устройство по п. 1, о т л и ч а ющ ее с я тем, что блок контроля содержит по числу дополнитель139 21
ных датчиков ячейки, каждая из которых состоит из триггера, элемента И и линии задержки, выход триггера каждой ячейки подключен к первому входу элемента И, выход которого через s линию задержки соединен с первым входом триггера своей ячейки, вторые входы триггера всех ячеек и второй ВХОД;.элемента И всех ячеек подключены к соответствующему выходу блока ю
k
И
контроля, входы которого соединены с выходом элемента И соответствующих ячеек.
Источники информации, принятые во внимание при экспертизе
кл. G 08 С 19/28, 1980(прототип).
