ми регистров и через второй инверторс вторым входом третьей схемь совпадения И, выход которой соединен с вторыми входами четвертой и пятой схемы совпадения И, а выход счетчика подсоединен к первому входу четвертой схемы совпадения И и через третий инвертор - к первому входу пятой схемы совпадения И, выход четвертой схемы совпадения И соединен с вторым управляющим входом второго регистра памяти, с входом второго
1
Изобретение относится к устройствам для маркирования металлов,, в. частности горячекатаных рулонов.
Цель изобретения - повышение надежности системы за счет автоматического восстановления учетных данных рулона при повреждении канала связи и обеспечение слежения за рулонами на участке весы - маркировщик уборочного конвейера.
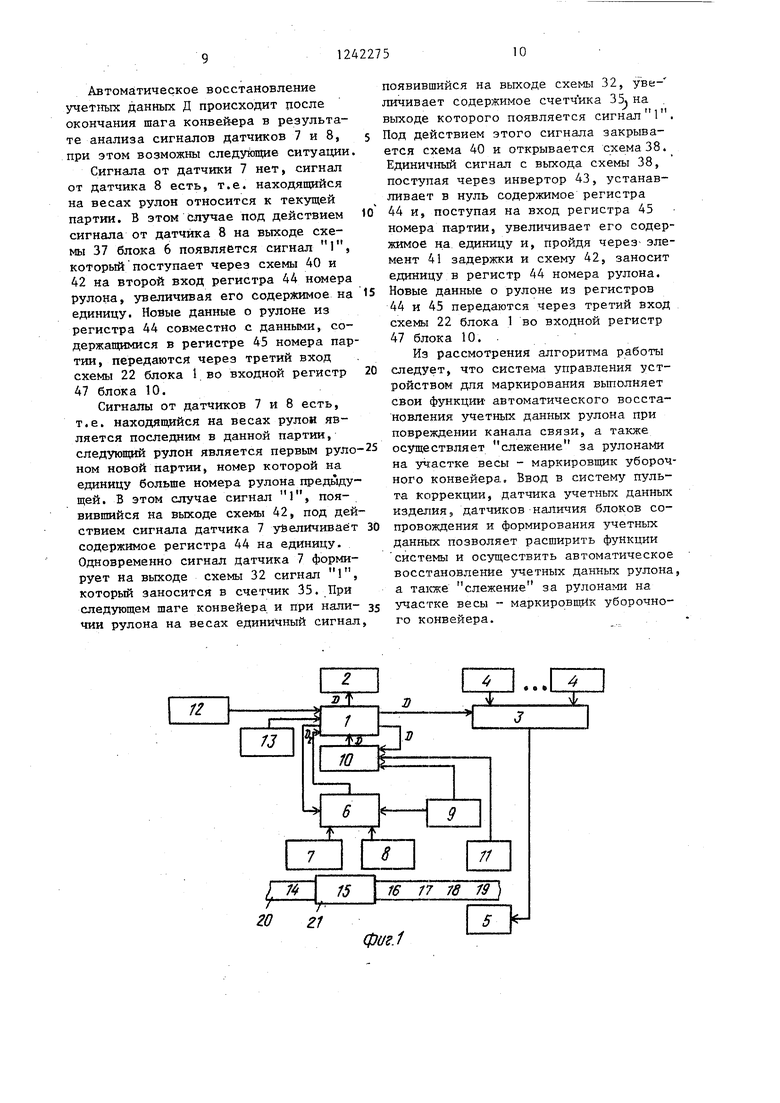
На фиг.1 представлена блок-схема системы управления устройством для маркирования; на фиг.2 - структурная схема .блока ввода информации; на ,фиг.3 - структурная схема блока восстановления учетных данных; на фиг.4- структурная схема блока сопровождения; на фиг.5 - кинематическая схема
механизации перемещения трафарета устройства для маркирования.
Система управления устройством для маркирования содержит блок 1 ввода информации, первый выход которого соединен с входом контрольного табло 2, второй выход соединен с первым входом блока 3 сравнения, остальные входы которого соединены с выходами датчиков 4 положения, а выход - с входом устройства 5 для маркирования, блок 6 восстановления учетных данных, первый вход которого соединен с выходом датчика 7 изменения учетных данных, второй вход соединен с выходом первого датчика 8 наличия рулонов, третий вход соединен с выходом датчика 9 импульсов и с первьи входом блока 10 сопровождения, втоэлемента задержки и через четвертый инвертор - с управляющим входом первого регистра памяти, а выход второго элемента задержки подсоединен к первому входу схемы 2 И-ИЛИ, второй вход которой соединен с выходом пятой ) совпадения И, а выход схемы 2 I-I-I-UIH подсоединен к второму управляющему входу первого регистра памяти, выход которого и выход второго регистра памяти являются выходом блока восстановления учетных данных.
рой вход котор.ого соединен с выходом второго датчика 11 наличия рулона, третий вход соединен с третьим выходом блока 1, первый вход которого
соединен с выходом блока 10, второй вход соединен с выходом блока 6, четвертый вход которого соединен с четвертым выходом блока I, третий и четвертый входы которого соединены с
выходами датчика 12 учетных данных и пульта 13 коррекции соответственно.
Позициями 14-19 обозначены места нахо; щения рулонов на конвейере 20, в линию которого встроены весы 21
для взвешивания рулонов.
Система имеет блочную структуру. Блок 1 ввода информации предназначен )viR ввода в систему данных о рулоне от датчика 12, пульта 13, блока 10 сопровождения и блока 6 восстановления учетных данных, а так же для выдачи данных о рулоне на контроль- . ное табло 2, в блоки 3, 6 и 10.
Блок 1 (фиг.2) состоит из много- входовой схемы И 22, схемы И-ИЛИ 23, схемы 24 формирователя и многоразрядного регистра 25. Первый вход схемы 22 соединен с третьим входом блока 1, второй вход - с четвертым входом блока 1, третий вход - с вторым входом блока 1, а выход схемы 22 соединен с первым, третьим выходами блока 1 и с первыми входами схем 23 и 24, вторые входы которых соединены
с третьим входом схемы 22. Выходы
схем 23 и 24 объединены в один выход, соеданенный с четвертым выходом бло
ка-1. Вход регистра 25 соединен с первым входом блока 1, а выход - с вторым выходом блока 1.
Контрольное табло 2 состоит из цифровых индикаторов и предназначено для индикации входящих и скорректированных данных о рулоне.
Блок 3 сравнения предназначен для сравнения информации, поступающей из блока 1, и сигналов от датчиков 4, выг.ачи в устройство 5 сигнала рассогласования и представляет с обой схему поразрядного сравнения информации.
Датчики 4 используются для определения истинного положения трафаретов и могут быть вьтолнены, например, в виде считывающих линеек на базе фотопреобразователей .
Устройство 5 для маркирования служит для нанесения информации о рулоне на его поверхность и содержит маркировочную головку, в корпусе которой смонтированы механизмы перестановки трафаретов и электрометаллиза- тора. Количество механизмов перестановки трафаретов равно количеству цифр (символов), наносимых на поверхность рулона.
Механизм перестановки трафарета (фиг.З) состоит из трафарета 26 и привода, управляемого электроклапанами. Привод механизма перестановки трафаретов пневматический. Каждый из трафаретов взаимосвязан с группой размещенных на общей оси пневмоци- линдррв 27-30, которые соединены между собой таким образом, что шток пневмоцилиндра 27 соединен с корпу- сом пневмоцилиндра 28, .а шток пневмоцилиндра 28 соединен с корпусом пневмоцилн1 дра 29 и т.д. Причем корпус пневмоцилиндра 27 закреплен на корпусе маркирующей головки, шток пневмоцилиндра 30 связан с трафаретом 26, а корпуса пневмоцилиндров 28-30 име- ют возможность перемещаться в направляющих .
Активные длины пневмоцилиндров (длина, соответствующая величине перемещения штока при подаче давления в него) выбраны из условия обеспечения установки трафарета в одном из десяти заданных положений. Активная длина наименьшего пневмоцилиндра равна расстоянию между осями сменных цифр трафарета. Активная длина этого пневмоцилиндра принята за единицу, активные длины остальных пневмоциt5
20
5
5 .„ 5
0 5
линдров отвечают соотношению 4:2:2:1, что позволяет выдавать задания на установку трафаретов в цифровом виде.
В качестве электрометаллизатораА применяют электрометаллизатор, ис- польззтащий принцип распыления двух непрерывно подаваемых электродов путем возбуждения между ними электрической дуги и р аспьшения расплавленного металла (алюминия) струей сжатого воздуха.
Блок 6 восстановления учетных данных предназначен для автоматического восстановления учетных данных (номера партии и номеров рулона в партии) о рулоне в случае повреждения канала связи-или датчика 12 учетных данных, ввода информации о рулоне из блока 1, приема сигналов от датчиков 7-9, выдача авторского восстановления.данных о рулоне в блок 1.
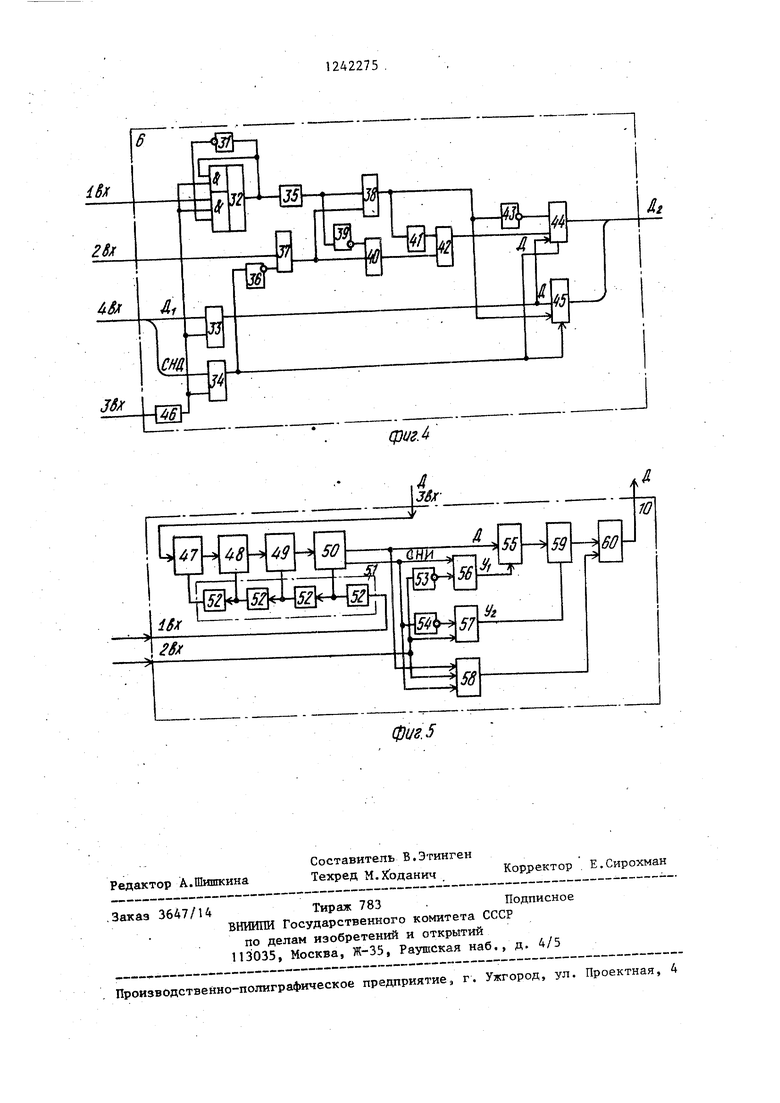
Блок 6 состоит из инвертора 31, схемы 2 И-ИЛИ 32, схем 33 и 34 совпадения, счетчика 35, инвертора 36, схем 37 и 38 совпадения, инвертора 39, схемы 40 совпадения, элемента 41 задержки, схемь ИЛИ 42, инвертора 43, регистров 44 и 45 и элемента 46 задержки.
Первый вход блока 6 соединен с выходом датчика 7 и третьим входом схемы 32. Второй вход блока 6 соединен с ВЁтходом датчика 8 и первым входом схемы 37. Третий вход блока 6 соединен с вьгходом датчика 9 и входом элемента 46 задержки, выход которой соединен с вторым и четвертым входами схемы 32 и вторыми входами схем 33 и 34, Четвертый вход блока 6 предназначен для подключения информа- дирнного D и управляющего СНД сигна- юв, поступающих с четвертого выхода блока 1, при этом информационный сигнал D подключен к первому входу схемы 33, а управляющий СНД - к первому входу схемы 34. Выход схемы 32 соединен с первым и через инвертор 31 с пятым входами схемы 32 и с входом счетчика 35, выход которого соединен с первым входом схемы 38 и через инвертор 39 с первым входом схемы 40. Выход схемь: 33 соединен с информационными входами регистров 44 и 45. Выход схемы 34 соединен с управляющими записью информации входами регистров 44 и 45 и через инвертор 36 с вторым . входом схемы 37, выход которой соединен с вторыми входами схем 38 и 40.
Выход схемы 38 соединен с вторым уп- равлягопщм входом регистра 45 и через инвертор 43 с входом установки в нуль регистра 44. Выход схемы 40 соединен с вторым входом схемы 42, первый вход которой через элемент 41 соединен с выходом схемы 38, а выход схемы 42 соединен с вторым управляющим входом регистра 44. Выходы регистров 44 и 45 через выход блока 6 соединены с вторым входом блока 1.
Датчик 7 изменения учетных данных предназначен для выдачи сигнала об окончании партии рулонов и представ- ляет собой кнопку с электронной схемой формирования сигнала. Выход датчика 7 соединен с первым входом блока 6 .
Датчики 8 и 11 фиксируют наличие рулонов на конвейере и представляют собой фотоэлектрические или пневмо- струйные преобразователи. Выход датчика 8 соединен с вторым входом блока 6, а выход датчика 11 - с вторым входом блока Ю.
Импульсный датчик 9 связан с автоматикой конвейера 20 и выдает импульсы Шаг конвейера окончен (11IKO) . Вьпсод датчика 9 соединен с третьим входом блока 6 и первым входом блока 10.
Блок 10 предназначен для сопровождения данных о рулоне на участке весы 21 - устройство 5 уборочного кон- вейерй 20, ввода данных о рулоне из блока 1, сигналов от датчиков 9 и 1 1 , хранения данных о снятом с конвейера 20 рулоне, выдачи данных о рулоне в блок 1.
Блок 10 (фиг,5) состоит из соединенных последовательно многоразрядных регистров 47-50 памяти, количество которых на единиду меньше установочных мест на участке весы 21 - ycT ройство 5 уборочного конвейера 20, регистра 51 сдвига, выполненного с равным числу регистров 47-50 числом ячеек 52 разрядов, инверторов 53 и 54 схем 55-58 совдадения многоразрядно- го регистра 59 и схемы 60 логического сложения.
Первый вход блока 10 соединен с выходом датчика 9 и является входом первой ячейки 52 регистра 51 сдвига, выходы ячеек 52 подключены к управляющим последовательным переносом данных входам регистров 47-50 памяти
последовательно в таком порядке, что первая ячейка 52 разряда регистра 51 соединена с последним регистром 50, а последняя ячейка разряда регистра сдвига - с первым регистром 47 памяти, вход которого является третьим входом блока 10. Первый информационный выход Д регистра 50 подключен к первым входам схем 55 и 58. Второй выход регистра 50, формирующий управляющий сигнал СНИ Наличие информа- дии, подключен к первым входам схем
56и 57 (через инвертор 54) и к третьему входу схемы 58.
Второй вход блока 10 подключен к выходу датчика 11 и вторым входам схемы 56 (через инвертор 53 и схем
57и 58). Выход схемы 56 подключен к второму входу схемы 55, выход которой соединен с информационным входом регистра 59, второй управляющий вход которого соединен с выходом схемы 57. Выход регистра 59 соединен с первым
входом схемы 60, второй вход которой соединен с выходом схемы 58, а выход схемы 60 соединен с выходом блока 10. Датчик I2 предназначен для формирования и передачи в блок 1 учетных данн1э1х о рулоне, подлежащем маркиро- ванжо. В качестве датчика 12 может быть применена система сбора и обработки технологической информации о рулоне (типоразмер, номера партии, смены, плавки, рулона в партии и т.д.). Информация на выходе датчика 12 представлена в цифровом виде. Датчик 12 соединен с блоком 1 каналом связи. Выход датчика соединен с третьим входом блока 1.
Пульт 13 корр екции состоит из вра щаюп тнхся декадных переключателей и предназначен для корректировки входных данных рулона. Выход пульта 13 соединен с четвертым входом блока 1.
При описании системы условимся обозначать: логическая единица сигнал наличия (в нашем случае это сигналы от датчиков 7-11) и наличие информации в регистрах 47-50 и 59 блока 10 и т.д., логический нуль О - отсутствие указанных сигналов и информации.
По технологии прокатки установленные торцом на конвейере 20 рулоны перемещаются в сторону маркировщика. Перемещение конвейера происходит тагами в одном направлении. При окончаНИИ движения конвейера 20 датчик 9, связанный с автоматикой конвейера, выдает тактовые импульсы окончания перемещения ШКО-, который поступает на третий и первый входы блоков 6 и 10 соответственно. При достижении ру,лоном весов 21 происходит взвешивание рулона и через время, определяемое длительностью взвешивания и фор- мирования данных, информация о руло,не, подлежащая нанесению на его поверхность из датчика 12 через схему 22 блока 1 заносится во входной регистр 47 блока 10 и индицируется на
табло 2. t
Мастер ОТК может скорректировать входную информацию о рулоне. В этом
случае скорректированные данные, наб ранные на пульте 13, через второй вход схемы 22 блока 1 заносятся на место ранее занесенной информации во входной регистр 47 блока 10 и индицируются на табло 2. Сигнал ШКО, пос тупивший через первый вход блока 10 в регистр 51, формирует серию последовательных импульсов, обеспечивающи перенос содержащейся в регистрах 47;50 информации на один шаг ближе к выходу блока 10 последовательно, начиная с последнего регистра 40. Из блока 10 информация о рулоне передается в регистр 25 блока 1, который идентифицируется с установочным местом 19 конвейера 20. При этом инфор- мация из регистра 50 блока 10 в регистр 25 блока 1 передается после анализа состояния датчика 11 (есть информация о наличии рулона или нет) и информации в регистре 50 (присутствие сигнала наличия информации СНИ на выходе регистра 50). При этом возможны следующие ситуации: сигнал от датчика 11 есть, информация в регист ре 50 блока 10 есть (сигнал на втором выходе регистра 1) - в этом случае информация Д о рулоне через схемы 58 и 60 блока 10 передается в регистр 25 блока 1; сигнала от датчика 11 нет, информации в регистре 50 нет - перепись информации не производится; сигнала от датчика 11 нет, информация в регистре 50 блока 10. есть - в этом случае на выходе схемы 56 блока 10 формируется управляющий сигнал У , который поступает на второй, вход схемы 55, разрешая перепись информации о рулоне из регистра 50
5 10
15
п 25
. ,
0
в регистр 59 учета снятых рулонов, а это значит, что рулон с конвейера 20 снят; сигнал от датчика 11 есть, информация в регистре 50 блока IО отсутствует (сигнал на втором выходе регистра 50 О) - в этом случае на выходе схемы 57 блока 10 формируется управляющий сигнал Yg , который, поступая на управляющий вход регистра 59 снятых рулонов, разрешает перепись информации из регистра 59 через схему 60 блока 10 в регистр 25 блока 1 , а э то значит, что снятый рулон поставлен на свободное установочное место конвейера 20.
Из регистра 25 блока 1 данные о рулоне в цифровом виде через блок 3 поступают в устройство 5. В устройстве 5 под воздействием входной информации о рулоне трафареты устанавливаются в требуемое положение и при отсутствии сигнала рассогласования из блока 3 включается привод злектро- металлизатора и данные о рулоне наносятся на его поверхность.
Сигнал ШКО, поступивший на третий вход блока 6, через время, определяемое временем задержки элемента 46, поступает на входы схем 32, 33 и 35 блока 6. Время задержки Т определяется длительностью процесса взвешивания и формирования учетных данных в датчике 12. Сигнал ШКО, поступивший на вход схемы 33, разрешает перепись учетной информации Д о рулоне в регистры 44 и 45 под воздействием управляющего сигнала наличия данных СНД, поступающего через схему 34 на управляющие входы указанных регистров. Учетная информация Д представляет собой часть входной информации о рулоне и содержит данные о номере партии и номере рулона в партии. Эта информация с выхода схемы 23 с управляющим сигналом СНД, сформированным формирователем 24 блока 1, через четвертый выход блока 1 поступает на четвертый вход блока 6. При отсутствии информации Д и сигнала СНД нулевое значение информации Д в регистры 44 и 45 не заносится.
При обрыве линии связи между датчиком 12 и блоком 1 либо неисправнос- ти датчика 12 блок 6 автоматически восстанавливает учетные данные Д (номер партии и номер рулона в партии) рулона, находящегося на весах 21.
Автоматическое восстановление учетных данных Д происходит после окончания шага конвей-ера в результате анализа сигналов датчиков 7 и 8, при этом возможны следующие ситуации.
Сигнала от датчики 7 нет, сигнал от датчика 8 есть, т.е. находящийся на весах рулон относится к текущей партии. В этом случае под действием сигнала от датчика 8 на выходе схемы 37 блока 6 появляется сигнал 1, который поступает через схемы 40 и 42 на второй вход регистра 44 номера рулона, увеличивая его содержимое на единицу. Новые данные о рулоне из регистра 44 совместно с данными, содержащимися в регистре 45 номера партии, передаются через третий вход схемы 22 блока 1 во входной регистр 47 блока 10.
Сигналы от датчиков 7 и 8 есть, т.е. находяпщйся на весах рулон является последним в данной партии, следующий рулон является первым руло ном новой партии, номер которой на единицу больше номера рулона предыдущей. В этом случае сигнал 1, появившийся на выходе схемы 42, под действием сигнала датчика 7 у&еличиваёт содержимое регистра 44 на единицу. Одновременно сигнал датчика 7 формирует на выходе схемы 32 сигнал 1, который заносится в счетчик 35. При следующем шаге конвейера и при нали- чии рулона на весах единичный сигнал
появившийся на выходе схемы 32, уве- личивает содержимое счетчика 35. на выходе которого появляется сигнал Под действием этого сигнала закрывается схема 40 и открывается схема 38. Единичный сигнал с выхода схемы 38, поступая через инвертор 43, устанавливает в нуль содержимое регистра 44 и, поступая на вход регистра 45 номера партии, увеличивает его содержимое на единицу и, пройдя через- элемент 41 задержки и схему 42, заносит единицу в регистр 44 номера рулона. Новые данные о рулоне из регистров 44 и 45 передаются через третий вход схемы 22 блока 1 во входной регистр 47 блока 10. .
Из рассмотрения алгоритма работы следует, что система управления устройством для маркирования вьтолняет свои функции автоматического восстановления учетных данных рулона при повреждении канала связи, а также осуществляет слежение за рулонами на уч:астке весы - маркировщик уборочного конвейера. Ввод в систему пульта коррекции, датчика учетных данных изделия, датчиков наличия блоков сопровождения и формирования учетных данных позволяет расширить функции системы и осуществить автоматическое восстановление учетных данных рулона а также слежение за рулонами на участке весы - маркировщик уборочного конвейера.
Эле/ гг7роме/77а 7/ 1/зе7/77оо А/
(риг.З
8ш
-вч
4
S.1
фиг л

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для передачи информации при учете перемещающихся изделий | 1982 |
|
SU1068957A2 |
| Устройство для передачи информации при учете перемещающихся изделий | 1976 |
|
SU616647A1 |
| Устройство для подсчета перемещающихся изделий | 1983 |
|
SU1121687A2 |
| Система сбора и обработка данных для обслуживания торгового комплекса общественного питания | 1975 |
|
SU608164A1 |
| Устройство для передачи информации при учете перемещающихся изделий | 1979 |
|
SU868813A2 |
| СИСТЕМА ИЗГОТОВЛЕНИЯ, УЧЕТА И ВЕРИФИКАЦИИ ЗАЩИТНЫХ ЗНАКОВ И ЗАЩИЩЕННЫХ ДОКУМЕНТОВ | 2004 |
|
RU2272320C1 |
| Устройство для учета перемещаемых изделий | 1984 |
|
SU1231523A1 |
| Устройство для подсчета перемещающихся изделий | 1981 |
|
SU963021A1 |
| УСТРОЙСТВО ДЛЯ МОДЕЛИРОВАНИЯ ЦИФРОВЫХ СХЕМ | 1992 |
|
RU2042196C1 |
| Устройство для контроля каналов управления и сигнализации судовых энергетических установок | 1984 |
|
SU1177797A1 |


Редактор А.Шишкина
Составитель В.Э ринген
Техред М-Х оданич Корректор , Е.Сирохман
.Заказ 3647/14Тираж 783 . Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб,, д. 4/5
Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4
Физ.5
| Устройство для маркировки | 1976 |
|
SU662190A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
| Устройство для маркировки | 1972 |
|
SU483166A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
| Система управления устройством для маркирования | 1980 |
|
SU902900A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
