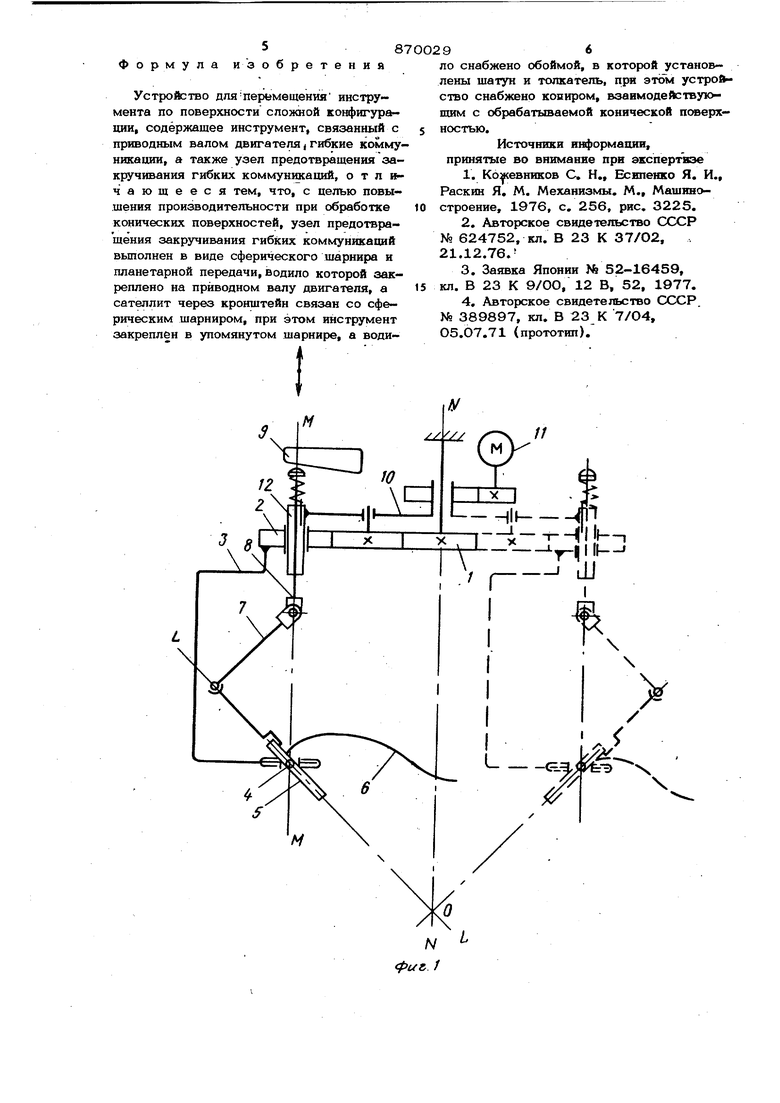
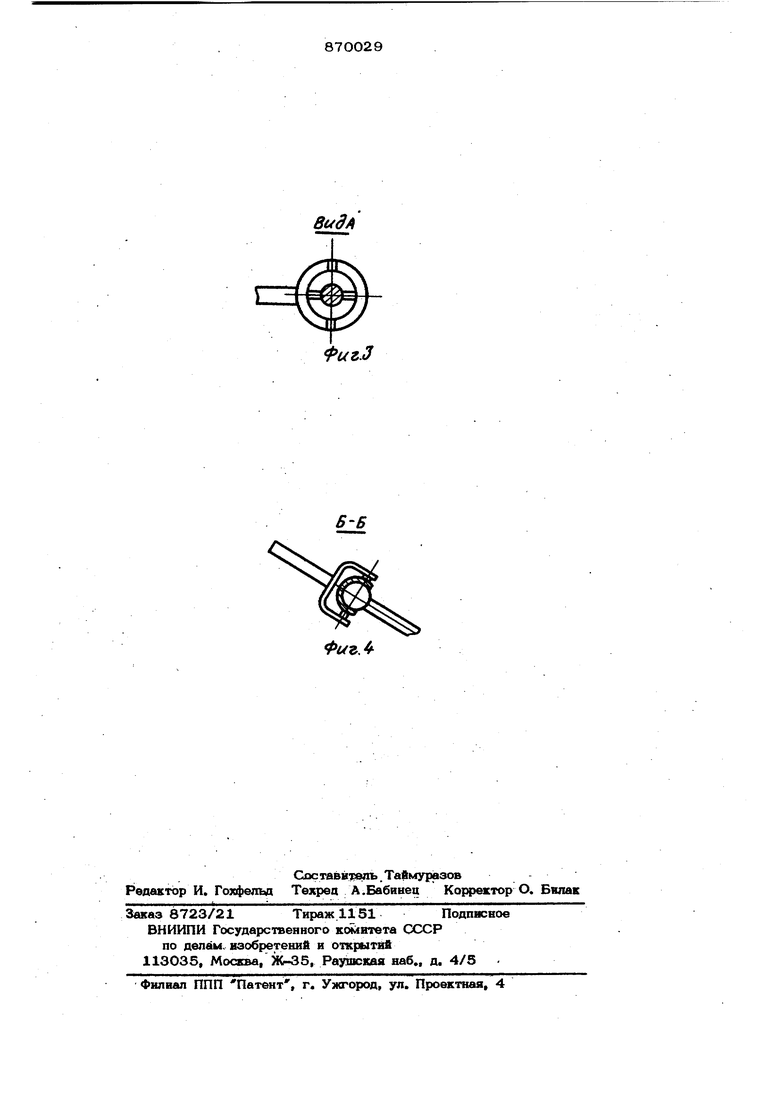
(54) УСТРОЙСТВО ДЛЯ ПЕРЕМЕЩЕНИЯ ИНСТРУМЕНТА ПО ПОВЕРХНОСТИ СЛОЖНОЙ КОНФИГУРАЦИИ Изобретение относится к машиностроению и может быть использовано в автоматизированных процессах для получения параллельно-кругового движения рабочего органа по конической поверхности, например при плазменном напылении выхлопных патрубков головок цилиндров двигателей внутреннего сгорания, а также при дробеструйной обработке, пескоструйной зачист ке и т.д. Известен привод мешалки для получения движения рабочего органа по конической поверхности с дополнительным вращением мешалки относительно собственной оси, содержащий установочную базу, привод, кинематические связи, пространственный шарнир, в котором укреплен рабочий орган ij. Известно устройство для электродуговой сварки кольцевых швов, содержащее установочную базу (корпус), рабочий орган (сварочная горелка), закрепленный в пространственном шарнире, привод, кинематические связи (шестерни), гибкие коммуникации (привода, шланги) 21, Данное устройство позволяет перемещать рабочий орган по круговой траектории, не поворачиваясь относительно корпуса устройства. Общими недостатками этих устройств является то, что пространственный шарнир жестко связан с установочной базой и ось вращения механизма всегда проходит через центр пространственного шарнира, а,отсутствие шатуна в первом случае, не позволяет изменить угол наклона образующей конической поверхности в процессе работы, а во втором случае ограничивается величиной перемещения полэуяа по направляющим приводной шестерни. Известно также поворотное устройство для плазменной горелки, содержащее установочную базу, привод кинематические связи, шарнир, в котором укреплен рабочий орган fS. Данное устройство позволяет получить параллельно-круговое движение рабочего органа и исключить закручивание гибких ком(Ауникаций, ио отсутствие шатуна не позволяет менять угол наклона образующе конической поверхности, который в процессе {заботы остается всегда постоянным Наиболее близким техническим решением к изобретению является устройство для кислородной резки изделия, содержащее инструмент, связанный с приводным валом двигателя, гибкие шланги, а также узел предотвращения закручивания шлангов .4 J Известное устройство позволяет получить параллельно-круговое движение рабочего органа без закручивания гибких коммуникаций. Недостатком этого устройства $шляется то, что подшипник с закрепленным рабочим органом связан с установочной базой при помощи кронштейна, вращающегося в процессе работы относительно уст ройства и ограничивающего тем самым зону, в которую подводятся коммуникации вследствие чего угол наклона образующей конической поверхности ограничен до 35 и не меняется в процессе работы. Целью изобретения является возможность автоматического изменения в процессе работы угла наклона оси рабочего органа от О до 90 без закручивания гибких коммуникаций при параллельно-кру говом движении и повьпиение производительности при обработке конических поверхностей. Для этого в устройство для перемеще ния инструмента по поверхности сложной К01к|)игураш1и, содержащем инструмент, связанный с приводным валом двигателя гибкие коммуникации, а также узел предотвращения закручивания гибких коммуникаций, последний выполнен в виде сферического шарнира и планетарной передачи, водило которой закреплено на приводном валу двигателя, а сателлит через кронштейн связан со сферическим шарни,ром, при этом инструмент закреплен в упомянутом ,- а водило снабжено обоймой, в которой установлены шатун и толкатель, при этом устройство снабжено копиром, взаимодействующим с обраба тываемой конической поверхностью. На фиг. 1 изображена схема устройства; на фиг. 2 - общий вид.устройства; на фиг. 3 - вид А фиг. 2; на фиг.. .4 - разрез Б-Б фиг, 2, Устройство состоит КЗ центрального колеса 1 планетарной передачи, посредством оси связанного с установочной базой В зацеплении с ним находится промежуточное колесо и сателлит 2, который через кронштейн 3 связан со сферическим шарниром 4. В шарнире 4 установлен инструмент 5 с подведеннымн гибкими шлан-. гами 6, который через шатун 7 и толкатель 8 совершает поступательное движение от копира 9,. Водило 1О приводится в движение от двигателя 11 и имеет обойму 12. Устройство работает следукяцим образом, От двигателя 11 вращение передается водилу 10 с обоймой 12, совершающему круговое движение вокруг неподвижной оси NN .Обойма 12 приводит в движение сателлит 2 планетарной передачи. Кронштейн 3 со сферическим шарниром 4, закрепленный на сателлите 2, совершает параллельно-круговое движение, обеспечивая при этом свободную зону для подвода гибких шлангов 6 и инструменту 5. При вращении водила .10 С обоймой 12 ось LL инструмента 5 описывает коническую поверхность с вершиной в точке О, находящийся на оси NN устройства. Изменение угла наклона оси L L (обра- , зующей конической поверхности обеспечивается за счет перемещения толкателя 8 от копира 9, связанного посредством шатуна 7 с инструментом 5. Таким образом, инструмент S совершает параллельно-круговое движение по конической поверхности с возможностью изменения угла наклона образующей от О до 90 без вращения вокруг собственной оси, что исключает закручивание гибких шлангов. Применение предлагаемого устройства позволяет улучшить качество процесса, например плазменного напыления выхлопных патрубков головок хшлиндров двигателей внутреннего сгорания, вследствие того,.что рабочий орган постоянно ориентируется под необходимым углом к обрабатьшаемой поверхности, увеличить произБодителшостъ процесса за счет автоматической ориентации инструмента относительно обрабатьшаемой поверхности в про1юссе работы устройства; исключить закручивание гибких коммуникаций (шлангов, проводсж и т.п.), подводимых к рабочему ofHaHy; получить любой угол наклона (от О до 90) инструмента относительно оси вращения устройства; автоматизировать технологические процессы обработки, например плазменное напыление, окраску, дробеструйную обработку, пескоструйную очистку и т.д. деталей с пространственно сло аными поверхностями. формула изобретения Устройство для перемещения инструмента по поверхности сложной конфигурации, содержащее инструмент, связанный с приводным валом двигателя j гибкие комму никации, а также узеп предотвращения закручивания гибких коммуншсаций, отличающееся тем, что, с целью повышения производительности при обработке конических поверхностей, узел предотвращения закручивания гибких коммуникаций вьшолнен в виде сферического шарнира и планетарной передачи, водило которой закреплено на приводном валу двигателя, а сателлит через кронштейн связан со сферическим шарниром, при этом инструмент закреплен в упомянутом шарнире, а води89 ло снабжено обоймой, в которой установлены шатун и толкатель, при этом устройство снабжено копиром, взаимодействующим с обрабатываемой конической поверхностью. Источники информации, принятые во внимание при экспертнзе 1.Кожевников С. Н., Бсипенко Я. И., Раскин Я, М. Механизмы. М., Машиностроение, 1976, с. 256, рис. 3225. 2.Авторское свидетельство СССР № 624752, кл. В 23 К 37/02, 21.12.76/ 3.Заявка Японии № 52-16459, кл. В 23 К 9/00, 12 В, 52, 1977. 4.Авторское свидетельство СССР. № 389897, кл. В 23 К 7/О4, 05.07.71 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| Смеситель | 1983 |
|
SU1151288A1 |
| РЫЧАЖНЫЙ МЕХАНИЗМ В.И. ПОЖБЕЛКО С ТОЧНЫМ ДЛИТЕЛЬНЫМ ВЫСТОЕМ | 2023 |
|
RU2836248C1 |
| РУКАВНЫЙ НАСОС С ПЛАНЕТАРНОЙ ЗУБЧАТОЙ ПЕРЕДАЧЕЙ | 2010 |
|
RU2555096C2 |
| СПОСОБ ОБРАЗОВАНИЯ МАХОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ В ВИДЕ МАШУЩЕГО ВИНТА | 2010 |
|
RU2482010C2 |
| ПЕРИСТАЛЬТИЧЕСКИЙ НАСОС | 2011 |
|
RU2534648C2 |
| УСТРОЙСТВО ДЛЯ ОБРАЗОВАНИЯ СКВАЖИН В ГРУНТЕ УДАРНЫМ СПОСОБОМ | 2012 |
|
RU2517267C1 |
| КОПИРУЮЩИЙ МАНИПУЛЯТОР | 2020 |
|
RU2751779C1 |
| Привод исполнительного механизма горного комбайна | 1988 |
|
SU1707196A1 |
| ПРОХОДЧЕСКИЙ РОБОТ И ТРАНСПОРТИРУЮЩИЙ МЕХАНИЗМ ПРОХОДЧЕСКОГО РОБОТА | 1988 |
|
SU1549153A1 |
| Полировальный станок | 1931 |
|
SU33422A1 |

/2 ; 2V Щ. 1- X I У 7П V -Ч -г- 1 И
