Изобретение относится к машиностроению, в частности к манипуляторам с замкнутой кинематической цепью для подобного воспроизведения движения рабочего органа и может найти применение в обрабатывающих центрах, автоматических линиях и медицине.
Известен копирующий механизм в виде пантографа Сильвестра для подобного построения отдельных линий, содержащий замкнутую кинематическую цепь, по периферии которой расположены три шарнирных четырехзвенника с одной общей вершиной М, лежащей на общей линии, соединяющей центры шарниров каждого из трехшарнирных шатунов (Крайнев А.Ф, Словарь-справочник по механизмам. Издание второе. - М.: «Машиностроение», 1987. С. 385, рис. а)) - аналог.
Недостатками известного копирующего механизма являются:
1. Сложность конструкции и трудоемкость точного изготовления сложных трехшарнирных звеньев, применяемых в качестве шатунов в замкнутой кинематической цепи.
2. Большие габариты и сложность сборки замкнутых контуров механизма из многошарнирных звеньев различной формы и различных размеров.
3. Ограничение функциональные возможности копирования только отдельных задаваемых линий.
Наиболее близким, по технической сущности и достигаемому эффекту, к предлагаемому изобретению является копирующий манипулятор, содержащий установленное на основании задающее устройство замкнутой кинематической цепи на основе шарнирного привода и копирующее исполнительное устройство рабочего органа, которые выполнены в виде сложного 34-звенного рычажного механизма, содержащего 15 сложных сферических шарниров и 4-х приводных управляющих гидроцилиндров (Крайнев А.Ф., Механика машин. Фундаментальный словарь. - М.: «Машиностроение», 2000. С. 295, рис. в)) - прототип.
Недостатками указанного копирующего манипулятора являются:
1. Сложная конструкция, состоящая из 34 подвижных звеньев и четырех приводных гидродвигателей.
2. Высокая трудоемкость изготовления и сборки замкнутой кинематической цепи привода на основе 15 сложных сферических шарниров с точным пересечением в одной точке трех осей сферических поверхностей (US Patent 4, 628, 765/1986).
3. Ограниченные функциональные возможности не позволяют копировать замкнутые контуры заданной геометрии и изменять их геометрию в заданной точке рабочего пространства манипулятора.
В основу изобретения положена техническая задача, заключающаяся в расширении функциональных возможностей манипулятора при копировании замкнутых контуров заданной геометрии и ее изменении в заданной точке рабочего пространства манипулятора, а также упрощении его конструкции и снижении трудоемкости ее изготовления и сборки.
Получение технического результата достигается за счет того, что предлагаемый копирующий VIP-манипулятор содержит задающее приводное устройство замкнутой кинематической цепи, выполненное в виде задающего параллелограмма переменной геометрии, а также копирующее исполнительное устройство рабочего органа, выполненное в виде копирующего параллелограмма, геометрически подобного задающему параллелограмму и шарнирно соединенному с ним посредством четырех двушарнирных одинаковой длины и восьми двойных цилиндрических шарниров с параллельными между собой осями их углового поворота.
Сущность изобретения поясняется чертежами на фиг. 1, фиг. 2, фиг. 3, фиг. 4.
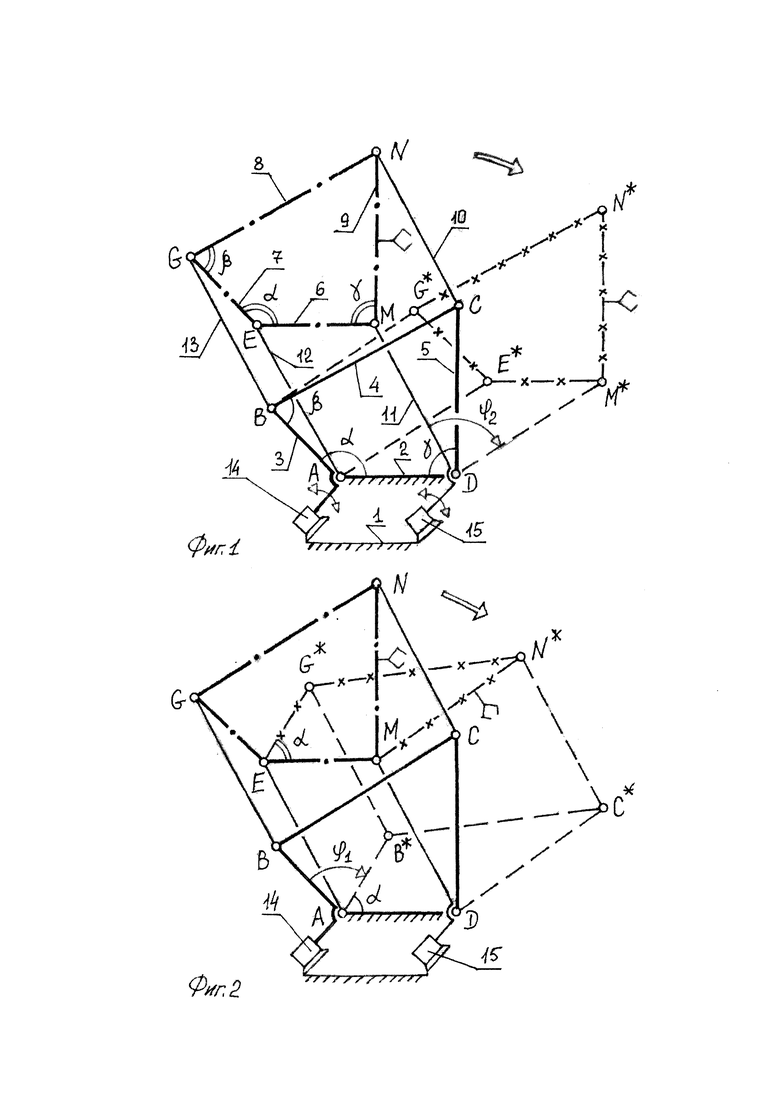
На фиг. 1 изображен общий вид копирующего VIP-манипулятора, содержащего установленное на основании 1 задающее приводное устройство замкнутой кинематической цепи, выполненное в виде задающего шарнирного четырехзвенника ABCD переменной геометрии (задаваемой через углы α, β и γ), с образующими замкнутый контур двушарнирными звеньями 2 (стойка), 3, 4 и 5; а также содержащего копирующее исполнительное устройство рабочего органа, выполненное в виде копирующего шарнирного четырехзвенника EGNM, геометрически подобного (т.е. с теми же углами α, β, γ) задающему параллелограмму ABCD. Замкнутый контур копирующего четырехзвенника EGNM образован двушарнирными звеньями 6, 7, 8 и 9, которые шарнирно соединены с задающим параллелограммом ABCD посредством четырех двушарнирных звеньев 10, 11, 12, 13 и восьми двойных цилиндрических шарниров А, В, С, D, Е, G, N и М с параллельными между собой осями их углового поворота. Замкнутая кинематическая цепь копирующего VIP-манипулятора выполнена с двумя независимыми приводами от поворотных двигателей 14 и 15, обеспечивающих раздельное изменение геометрии замкнутого шарнирного контура EGNM (от двигателя 14) и его последующее круговое перемещение относительно основания 1 (за счет двигателя 15).
На фиг. 2 представлен вариант установки от двигателя 14 (за счет поворота его вала на угол ϕ1) переменной подобной геометрии задающего ABCD и копирующего EGNM шарнирных многогранников для получения другой формы замкнутых контуров в виде EG*N*M (задаваемой через угол а и отличающейся от шарнирных параллелограммов на фиг. 3 и фиг. 4).
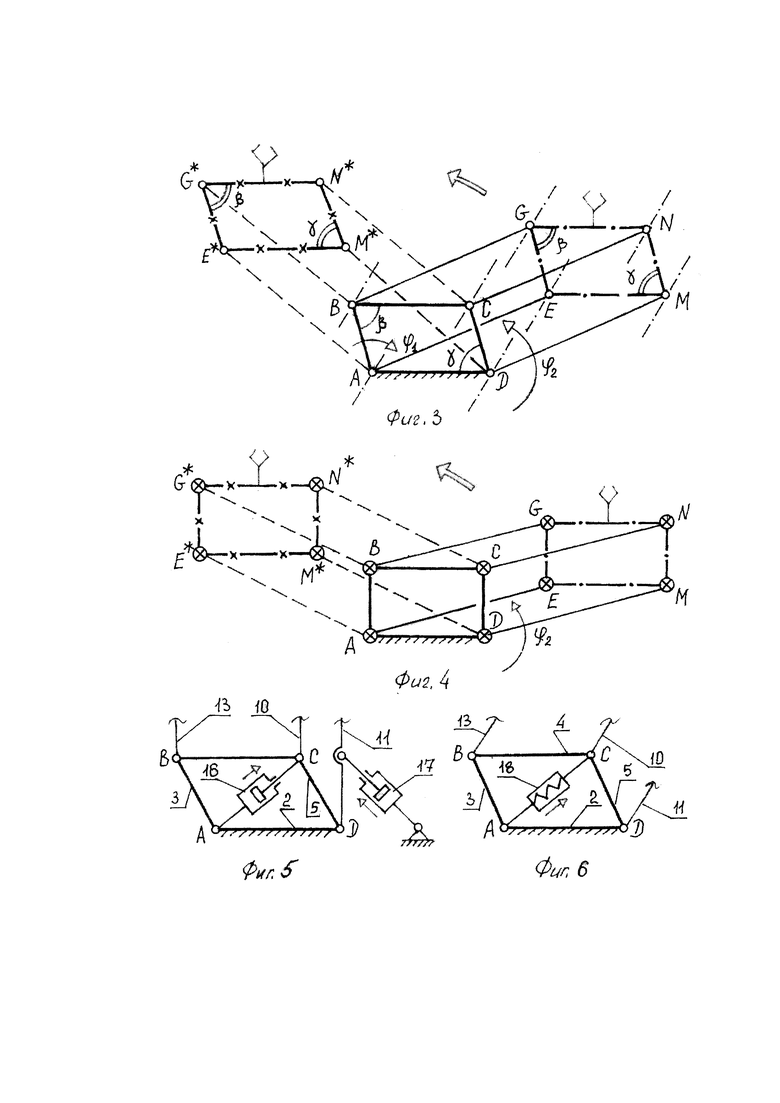
На фиг. 3 представлен вариант установки от двигателя 14 (через угол ϕ1) переменной геометрии замкнутого контура копирующего четырехзвенника EGNM в виде заданного параллелограмма (AB=CD, AD=BC, β=γ) и его последующего кругового перемещения двигателем 15 в положение E*G*N*M* в заданную точку рабочего пространства манипулятора (путем поворота звена DM на угол ϕ2). Также на фиг. 3 представлен вариант выполнения всех вершин А, В, С и D замкнутого контура, задающего четырехзвенника ABCD и всех вершин Е, G, N и М подобного ему замкнутого контура, копирующего четырехзвенника EGNM в виде цилиндрических шарниров с параллельными между собой осями углового поворота, которые образуют смежные между собой плоские шарнирные параллелограммы ABGE, AEMD, DCNM и CBGN.
На фиг. 4 представлен вариант выполнения всех вершин А, В, С и D замкнутого контура, задающего четырехзвенника ABCD и всех вершин Е, G, N и М подобного его замкнутого контура, копирующего четырехзвенника EGNM в виде сферических шарниров, образующих между собой пространственный шарнирный параллелепипед (с параллельными ребрами одинаковой длины BG=CN=DM=AE), попарно соединяющими между собой вершин задающего ABCD и копирующего EGNM шарнирных четырехзвенников).
На фиг. 5 представлен вариант выполнения привода задающего шарнирного четырехзвенника ABCD в виде установленной вдоль его диагонали АС приводной поступательной кинематической пары, выполненной в виде управляющего гидроцилиндра 16 (обеспечивающего поворот ведущего звена 3 на угол ϕ1) совместно с выполнением привода перемещения копирующего шарнирного четырехзвенника EGNM в виде установленного на основание 1 поворотного гидроцилиндра 17 (обеспечивающего поворот ведущего звена 11 на угол ϕ2).
На фиг. 6 представлен вариант выполнения привода задающего четырехзвенника ABCD в виде установленной вдоль его диагонали АС приводной винтовой кинематической пары 18, обеспечивающей (посредством установочного регулирования длины этой диагонали АС) заданное изменение геометрии обоих параллелограммов ABCD и EGNM (через подобное преобразование в них углов α, β и γ) в заданной точке рабочего пространства манипулятора.
Работа представленного копирующего VIP-манипулятора заключается в следующем.
Выполнение копирующего VIP-манипулятора с двумя независимыми приводами задающего приводного устройства и исполнительного устройства рабочего органа, объединенными в единую замкнутую кинематическую цепь, обеспечивает геометрически подобный перенос замкнутого контура задающего четырехзвенника ABCD и раздельное дистанционное управление геометрией и расположением копирующего параллелограмма на одной из трех возможных режимов работы манипулятора:
N1) Режим изменения углов α, β, γ и геометрии замкнутого контура копирующего четырехзвенника EGNM в заданной точке его рабочего пространства - за счет управляемого поворота ведущего звена 3 на угол ϕ1,
N2) Режим перемещения замкнутого контура копирующего четырехзвенника EGNM в заданную точку рабочего пространства манипулятора - за счет управляемого поворота ведущего звена 11 на угол ϕ2,
N3) Режим совместного изменения геометрии и расположения замкнутого контура копирующего четерыхзвенника EGNM - за счет одновременного управляемого поворота обоих ведущих звеньев 3 и 11 при трех вариантах управления:
а) встречное вращение обоих ведущих звеньев 3 и 11;
б) попутное вращение по часовой стрелке обоих ведущих звеньев 3 и 11;
в) попутное вращение против часовой стрелки обоих ведущих звеньев 3 и 11.
Достигаемый в предлагаемом копирующем VIP-манипуляторе положительный эффект заключается в следующем:
1. Упрощение конструкции, трудоемкости изготовления и сборки манипулятора за счет применения только простых и малогабаритных двушарнирных звеньев с параллельными осями их поворота.
2. Расширение функциональных возможностей за счет раздельного дистанционного управления изменением геометрии и месторасположением замкнутого контура, копирующего четырехзвенника в заданной точке рабочего пространства манипулятора.
| название | год | авторы | номер документа |
|---|---|---|---|
| МНОГОКОНТУРНЫЙ ШАРНИРНЫЙ МЕХАНИЗМ | 2020 |
|
RU2751777C1 |
| МЕХАНИЗМ ПЛАВАЮЩЕГО ШАРНИРНОГО ПАРАЛЛЕЛОГРАММА | 2021 |
|
RU2765387C1 |
| СКЛАДЫВАЮЩИЙСЯ СИММЕТРИЧНЫЙ МЕХАНИЗМ МАНИПУЛЯТОРА | 2023 |
|
RU2821637C1 |
| ПЛАТФОРМЕННЫЙ СТЫКОВОЧНЫЙ МАНИПУЛЯТОР | 2020 |
|
RU2751781C1 |
| СКЛАДЫВАЮЩИЙСЯ ШАРНИРНЫЙ МАНИПУЛЯТОР | 2021 |
|
RU2765030C1 |
| ШАРНИРНЫЙ МЕХАНИЗМ ИЗМЕНЯЕМОЙ СТРУКТУРЫ | 2021 |
|
RU2765386C1 |
| ПРОСТРАНСТВЕННЫЙ МАНИПУЛЯТОР | 2021 |
|
RU2758377C1 |
| ШАРНИРНЫЙ МЕХАНИЗМ | 2021 |
|
RU2753064C1 |
| ПЛАТФОРМЕННЫЙ РОБОТ | 2020 |
|
RU2751778C1 |
| ГРУЗОПОДЪЕМНЫЙ МАНИПУЛЯТОР | 2020 |
|
RU2737012C1 |
Изобретение относится к машиностроению и может найти применение в обрабатывающих центрах и в автоматических линиях. Копирующий манипулятор содержит задающее устройство и копирующее исполнительное устройство рабочего органа, установленные на основании с образованием замкнутой кинематической цепи, и привод. Задающее устройство выполнено в виде задающего шарнирного четырехзвенника переменной геометрии. Копирующее исполнительное устройство представляет собой копирующий шарнирный четырехзвенник переменной геометрии. Шарнирные четырехзвенники выполнены геометрически подобными и шарнирно соединены между собой посредством четырех двушарнирных звеньев одинаковой длины и восьми двойных шарниров, которые образуют между собой шарнирные параллелограммы. В результате обеспечивается упрощение конструкции манипулятора, снижение трудоемкости его изготовления и сборки, а также расширение его функциональных возможностей. 7 з.п. ф-лы, 6 ил.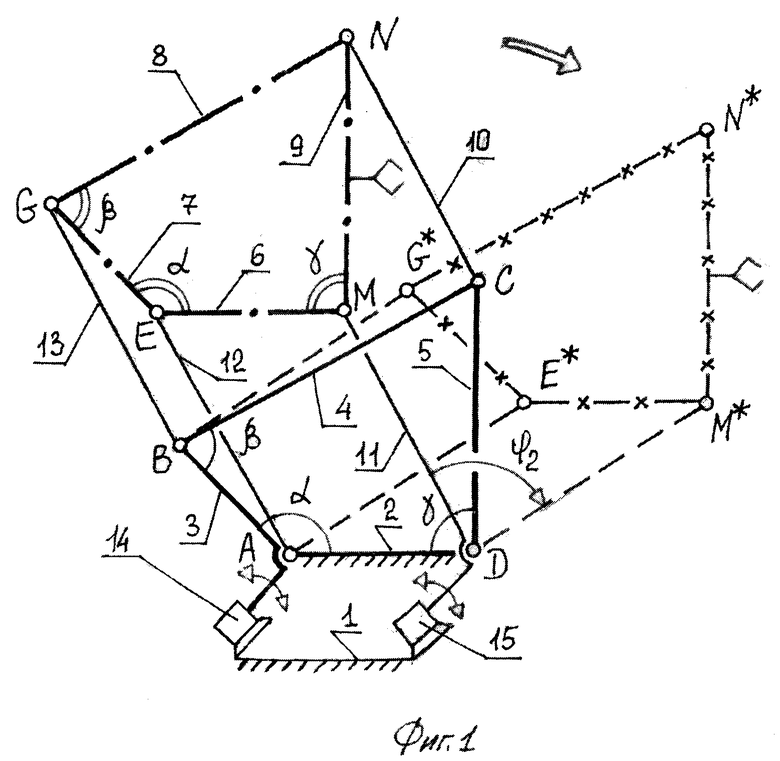
1. Копирующий манипулятор, содержащий задающее устройство и копирующее исполнительное устройство рабочего органа, установленные на основании с образованием замкнутой кинематической цепи, и привод, отличающийся тем, что задающее устройство выполнено в виде задающего шарнирного четырехзвенника переменной геометрии, а копирующее исполнительное устройство рабочего органа выполнено в виде копирующего шарнирного четырехзвенника переменной геометрии, геометрически подобного задающему шарнирному четырехзвеннику и шарнирно соединенного с ним посредством четырех двушарнирных звеньев одинаковой длины и восьми двойных шарниров, которые образуют между собой шарнирные параллелограммы.
2. Копирующий манипулятор по п. 1, отличающийся тем, что задающей и копирующей шарнирные четырехзвенники выполнены в виде одинаковых шарнирных параллелограммов.
3. Копирующий манипулятор по п. 1, отличающийся тем, что задающий и копирующий шарнирные четырехзвенники выполнены с одинаковым замкнутым четырехсторонним контуром, отличным от параллелограмма.
4. Копирующий манипулятор по п. 2, отличающийся тем, что привод выполнен в виде двух установленных на основании поворотных двигателей, один из которых выполнен с возможностью изменения геометрии замкнутого контура копирующего шарнирного параллелограмма, а второй - с возможностью его последующего кругового перемещения относительно основания.
5. Копирующий манипулятор по п. 1, отличающийся тем, что привод выполнен в виде установленной вдоль диагонали задающего шарнирного четырехзвенника приводной поступательной кинематической пары управляющего гидроцилиндра и установленного на основании поворотного гидроцилиндра, выполненного с возможностью перемещения копирующего шарнирного четырехзвенника.
6. Копирующий манипулятор по п. 1, отличающийся тем, что привод выполнен в виде установленной вдоль диагонали задающего шарнирного четырехзвенника приводной винтовой кинематической пары, выполненной с возможностью установочного регулирования геометрии замкнутого контура копирующего шарнирного четырехзвенника путем изменения длины упомянутой диагонали.
7. Копирующий манипулятор по п. 1, отличающийся тем, что все вершины задающего и копирующего шарнирных четырехзвенников выполнены в виде цилиндрических шарниров с параллельными между собой осями углового поворота.
8. Копирующий манипулятор по п. 1, отличающийся тем, что все вершины задающего и копирующего шарнирных четырехзвенников выполнены в виде сферических шарниров, а двухшарнирые звенья одинаковой длины расположены параллельно и соединяют между собой вершины задающего и копирующего шарнирных четырехзвенников.
| Манипулятор | 1980 |
|
SU905054A1 |
| Копирующий манипулятор | 1978 |
|
SU722754A1 |
| Манипулятор | 1985 |
|
SU1341015A1 |
| US 8667860 B2, 11.03.2014 | |||
| US 4853874 A1, 01.08.1989. | |||

