(54) СИСТЕМА УПРАВЛЕНИЯ ГИДРАВЛИЧЕСКИМ ПРЕССОМ
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство управления гидравлическимпРЕССОМ | 1979 |
|
SU804529A1 |
| Устройство для измерения распределенной температуры теплоносителя проходной нагревательной печи | 1980 |
|
SU901306A1 |
| Следящая система управления валом главного гидрораспределителя гидравлического пресса | 1986 |
|
SU1423425A1 |
| Устройство для автоматического регулирования скорости прессования на гидравлических прессах с дроссельным управлением | 1985 |
|
SU1263550A1 |
| СПОСОБ ЭКСПЛУАТАЦИИ СКВАЖИНЫ С ПОГРУЖНЫМ ЦЕНТРОБЕЖНЫМ НАСОСОМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1998 |
|
RU2165037C2 |
| Устройство для управления бортовыми рулями успокоителя качки судна | 1983 |
|
SU1147636A1 |
| Система синхронизации движения траверсы гидравлического пресса | 1988 |
|
SU1574482A1 |
| Система управления горячим прессованием | 1978 |
|
SU725906A1 |
| Аналого-цифровое множительное устройство | 1983 |
|
SU1124346A1 |
| Способ управления и синхронизации движения гидротехнического затвора и устройство для его осуществления | 1988 |
|
SU1617086A1 |
1
Изобретение относится к машиностроению, в частности к конструкции оборудования для обработки давлением.
Известна система управления гидравлическим прессом, содержащая электрически связанные блок динамического моделирования в виде квадратора, дифференцирующей цепи, усилителя и сумматора, блок управления в виде двух квадраторов, двух сумматоров, множительного элемента дифференцирующей цепи,усилителя, делителя и схема сравнения, соединенные с блоком динамического моделирования, задатчик скорости и датчик давления прессштемпеля, а также соединенные с блоком управления датчик давления насосно-аккумуляторной станции, датчик перемещений штока дросселя и механически связанный с дросселем исполнительный механизм fl.
Известной системе присущи недостатки,, обусловленные отсутствием учета в процессе прессования модуля упругости гидромеханической cиcтe вJI пресса и, как следствие этого, погрешности поддержания скорости прес сования, что приводит к снижению точг ности и качества прессизделий.
с целью повышения точности и качества изделий система управления гидравлическим прессом, содержащая электрически связанные блок динамического . моделирования в виде квадратора, дифференцирующей цепи, усилителя и сумматора, блок управления в виде двух квадраторов, двух сумматоров, множительного- элемента, дифг10ференцирующей , усилителя, делителя и схемы сравнения, соединенные с блоками динамического моделирования, задатчик скорости и датчик давления прессштемпеля, а также соединенные
15 с блоком управления датчик давления насосно-аккумуляторной станции, датт чик перемещения штока дросселя, механически связанный с дросселем исполнительный механизм, снабжена блоком
20 статического моделирования в виде шести ключей, пускового устройства, таймера, дифференцирующей цепи, нульоргана, линии задержки и блоков регистрации и обработки данных, а схема сравнения блока управления выполнена с тремя входами, к третьему входу которой подключен выход блока об работки данных, к первому входу ко- iTOporo подключен выход блока регистрации, к входам которого подключены
выходы ПЯТИ ключей. К пepвo /Iy входу пятого ключа подключен выход таймера, вход которого одновременно подключен ко вторым входам первого и шестого ключей и выходу пускового устройства, вход которого одновременно подключен к выходу датчика давления прессштемпеля,- первым входам первого и четвертого ключей и к первому входу шестого ключа, выход которого через последовательно соединенные дифференцирующую цепь и нуль-ортган одно-временно подключен ко входу линии задержки и вторым входам второго, третьего, четвертого и. пятого ключей, при. этом первый вход второго ключа подключен к выходу датчика перемещения штока дросселя, первый вход третьего ключа подключен к выходу датчика давления насосно-аккумуляторной станции, а выход линии задержки - ко второму входу блока обработки данных.
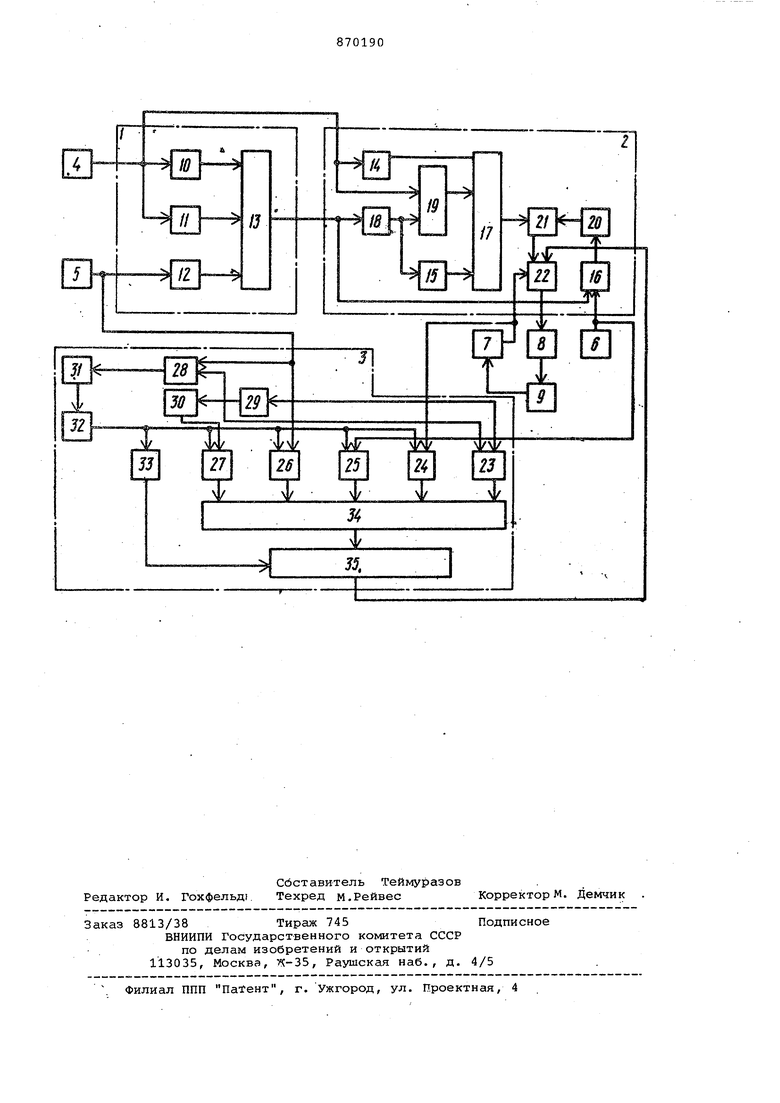
На чертеже представлена блок-схема системы. Она содержит блок 1 динамического .моделирования/ блок 2 управления, блок 3 статического моделирования, электрически связанные с задатчиком -4 скорости, датчиком 5 . давления прессштемпеля и датчиком 6 насосно-аккумуляторной станции, а также датчиком 7 перемещения штока дросселя и исполнительным механизмом 8, механически связанным с дросселем 9.
Блок 1 динамического моделирования состоит из квадратора 10, дифференцирующей цепи 11, усилителя 12 и сумматора 13, а блок 2 управления вк;лючает. квадраторы 14 и 15, сумматоры 16 и 17,дифференцирующую цепь 1 множительный элемент 19. Блок 3 статического моделирования состоит из шести ключей 23-28, пускового устройства 29,. таймера 30, дифференцирующей цепи 31, нуль-органа 32, линий задержки 33, блока регистрации 34 и блока обработки данных 35.
Блок 3 управления содержит также усилитель 20, еделитель 21 и схему сравнения 22..
Система работает следующим образом.
В момент появления высокого давления в 1идродилиндре пресса срабатывает пусковое устройство 29, которое запирает ключ 23, отпирает ключ 28 и- запускает таймер 30. Через открытый ключ 28 сигнал, пропорциональный давлению в цилиндре пресса, подается,на вход дифференцирующей цепи 31. В момент достижения максимума рабочего давления его производная становится равной нулю, что вызывает срабатывание нуль-органа 32, который отпирает ключи 24-27, чем достигается считывание сигналов с датчнк.а 5 давления прессштемпеля датчика 6 да ления насосно-аккумуляторчой станции
датчика 7 положения штока дросселя и сигнала времени, отсчитанного таймером 30.
Сигнал, пропорциональный давлению в наполнительных блоках, считывается через ключ 23, открытый до момента начала подпрессовки. Полученная информация хранится в блоке 34 регистрации в течение времени, определяемом линией задержки 33, а затем передается в блок 35 обработки данных,
который реализует заданную зависимость для модуля упругости. Сигнал с выхода этого блока 35, соответствующий численному значению модуля упругости гидромеханической системы пресса для данной прессовки, подается на вход схемы 22 сравнения блока 2 управления.
По окончании подпрессовки задатчик 4 скорости подает на один из входов блока 1 динамического моделирования переменный во времени электрический сигнал, соответствующий программе скорости прессования,, а на другой вход поступает сигнал от датчика 5 давления прессштемпеля. Блок 1 преобразует поступающие сигна.71Ы в сигнал, соответствукядий требуемому давлению рабочей жидкости в главном цилиндре пресса в соответствии с известным уравнением движений подвижной поперечины пресса.
Реализация зависимости сигнала давления в главном цилиндре достигается схемой соединения элементов блока 1 динамического моделирования, что в свою очередь обеспечивает учет нелинейности характеристики пресса и улучшение динамических свойств системы управления. Блок 2 управления преобразует сигнал, характеризующий требуемую величину давления в главном цилиндре пресса, в необходимую величину коэффициента сопротивления дросселя.
Последний в виде сигнала-аналога на элементе сравнения 21 сравнивается с действительным положением штока дросселя и модулем упругости гидрмеханической сиете1Фа пресса, а затем подается на вход исполнительного механизма 8 дросселя 9, что обеспечивает отработку системой заданной скоростной nporpaMNM с повышенной точностью и надежностью.
Блок 3 статического моделирования может быть использован и автономно для исследований упругих гидромеханических систем с переменными гидравлическими сопротивлениями. Для этой цели блок статического моделирования используется в комплекте с датчиками давления прессштемпеля, насосно-акКумуляторной станции и перемещения штока дросселя. в
Таким образом, использование предлагаемой системы управления позволяет повысить точность и надежность регулирования, а также улучшить качество прессизделий за счет учета нелинейной характеристики пресса и изменения модуля упругости гидромеханической системы пресса при переменных значениях гидравлических сопротивлений в процессе регулировакия скорости прессования. Формула изобретения Система управления гидравлическим прессом, содержащая электрически свя занные блок динамического юдeлиpoвa ния в виде квадратора, дифференцирующей цепи, усилителя и сумматора, блок управления в виде двух квадрато ров, двух сумматоров, множительного элемента, дифференцирующей цепи, уси лителя, делителя и схемы сравнения, соединенные с.блоком динамического моделирования задатчик скорости и датчик давления прессштемпеля, а также соединенные с блоком управления йатчик давления насосно-аккумуляторной станции, датчик перемещения штока дросселя и механически связанный с дросселем исполнительный механизм, отличающаяся тем, что, с целью повышения точности и ка чества, прессизделий, она снабжена блоком статического моделирования, выполненным в виде шести ключей, пус кового устройства, таймера, дифферен цирующей цепи , нуль-органа, линии за держки и блоков регистрации и обработки данных, а-схема сравнения блока управления выполнена с тремя входами, к третьему входу которой подключен выход блока обработки данных, к первому входу которого подключен выход блока регистрации, к входам которого под-, ключены выходы пяти ключей, -причем к первому входу пятого ключа подключен выход таймера, вход которого одновременно подключен ко-вторым входам первого и шестого ключей и выходу пускового устройства,, вход которого одновременно подключен к выходу датчика давления прессштемпеля, первым входам первого и четвертого ключей и к первому входу шестого ключа, выход которого через последовательно соединенные дифференцирующую цепь и нуль-орган одновременно подключен ко входу линии задержки и вторым входам второго, третьего, четвертого и пятого ключей, при этом первый вход второго ключа подключен к выходу дат чика перемещения штока дросселя, первый вход третьего ключа подключен к выходу датчика давления насосно-аккумуляторной станции, а выход линии задержки - ко второму входу блока обработки данных. Источники информации, принятые во внимание при экспертизе 1. ABToj)CKoe свидетельство СССР по заявке № 2735479/25-27 от 14.03,79, кл. В 30 В 15/30 (прототип).. .
Ш-Ш H
