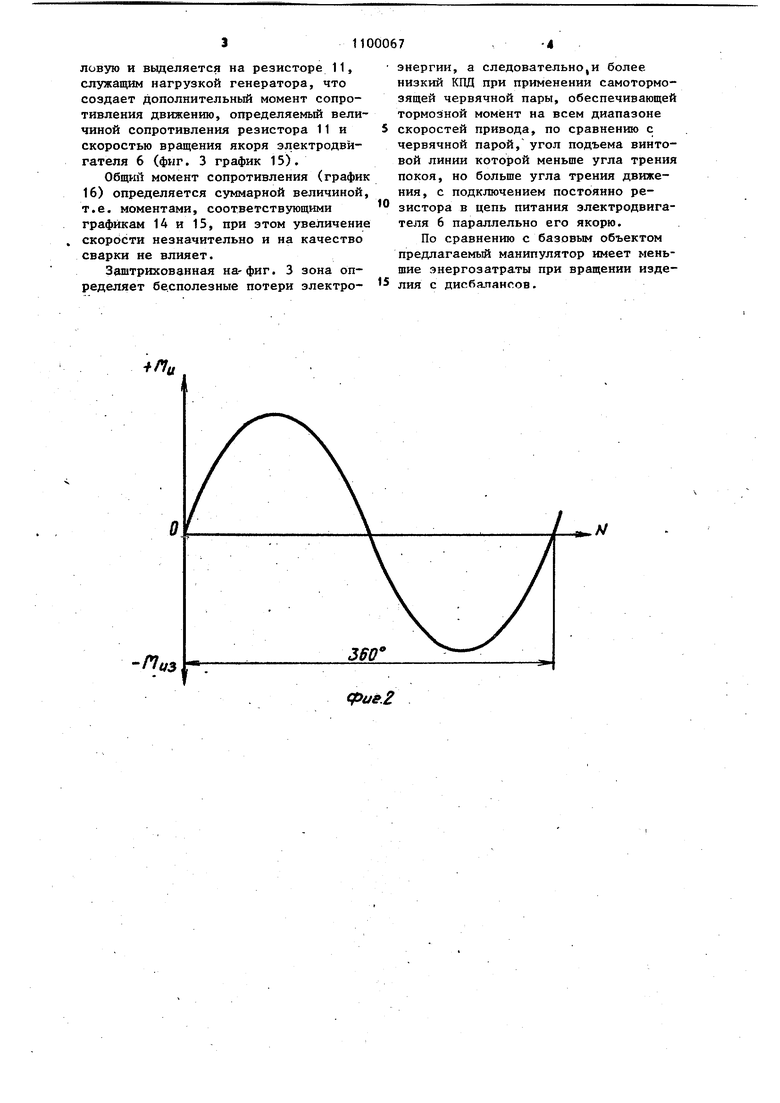
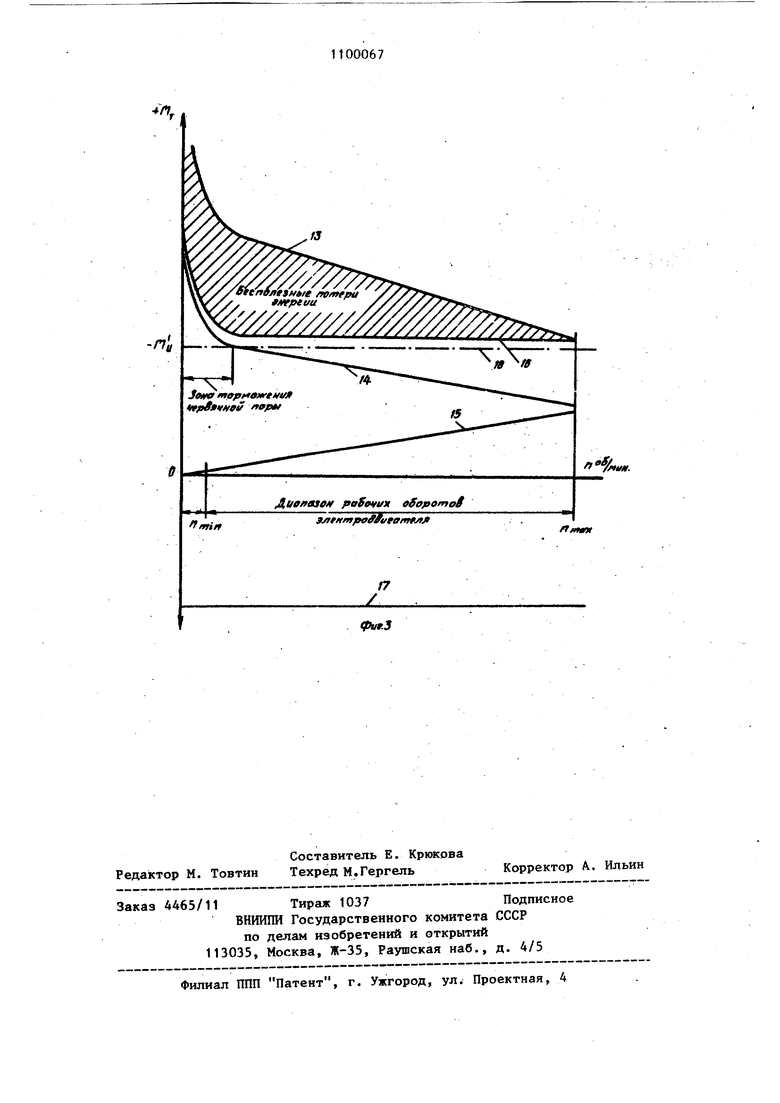
Изобретение относится к сварке, в частности к устройствам для установки изделий в положение, удобное для сварки, и вращения их со сварочной скоростью в про.цессе сварки кольцевых швов. Известен сварочный манипулятор, содержащий планшайбу для изделия, механизм для ее поворота с червячной парой и электродвигателем постоянного тока и схему управления с тиристо ным блоком. В этом манипуляторе червяк червяч ной пары выполнен самотормозящим, чт обеспечивает момент трения, превьшаю щий момент, образуемый дисбалансом изделия, и предотвращает самопроизвольное изменение скорости вращения планшайбы на всем диапазоне ее оборотов ; lj . Недостатком этого манипулятора является низкий КПД механизма поворо та планшайбы вследствие больших потерь энергии при вращении изделий, особенно с большим дисбалансом. Цель изобретения - снижение энерг затрат при вращении изделий.с дисбалансом . Указанная цель достигается тем, что в сварочном манипуляторе, содержащем планшайбу для изделия, механиз ее поворота с червячной парой и элек тродвигателем постоянного тока и схему управления электродвигателем с риристорным блоком, червяк червячной пары вьшолнен несамотормозящим, а сх ма управления снабжена резистором, подключенным параллельно якорю электродвигателя и тиристорному блоку. На фиг. 1 изображен манипулятор, на фиг. 2 - диаграмма моментов на валу электродвигателя от дисбаланса изделия за один оборот планшайбы; на фиг. 3 - график моментов вала электродвигателя при разньк скоростях вращения. Манипулятор содержит смонтированную на основании 1 посредством стоек 2 планшайбу 3. Плйншайба 3 снабжена механизмом ее поворота 4, установлен ным на цапфах 5 стоек 2. Механизм 4 поворота планшайбы включает электродвигатель 6 постоянного тока, редуктор 7 с выходной шестерней 8, взаимо действующей с шестерней 9. планшайбы 3. Редуктор 7 включает червячную пару (не показана), угол подъема вин товой линии червяка которой меньше угла трения -покоя и больше угла трения движения при применяемых скоростях скольжения рабочих витков червяка относительно червячного колеса, так как червяк несамотормозящий. Схема управления электродвигателя включает тиристорный блок 10, подключенный параллельно ему и якорю электродвигателя резистором 11. Изделие обозначено позицией 12. На фиг. 3 график 13 показывает изменение моментов сил трения на валу электродвигателя в зависимости от числа оборотов, в случае применения самотормозящей червячной пары в ре- , дукторе 7, график 14 -.изменение моментов сил трения на валу электродвигателя в зависимости от числа оборотов, в случае применения в редукторе 7 несамотормозящей червячной пары, график 15 - сопротивление вращению электродвигателя в зависимости от числа оборотов под действием резистора 11, график 16 - изменение суммарного момента на оси вращения электродвигателя от сил трения согласно графику 14 и графику 15, график 17-величину отрицательного момента на валу электродвигателя, возникающего под действием дисбаланса свариваемого изделия, график 18 - положение графика отрицательного момента 17 на поле графика положительного момента 16. Абсолютная величина моментов на графиках 13,14,17, а следовательно, и графика 16, в каждую единицу времени зависит от угла поворота планшай- бы (см. график моментов, возникающих на валу электродвигателя в зависимости от угла поворота планшайбы на фиг. 2). Момент на фиг. 3 указан для угла поворота планшайбы 3, соответствующего второй половине диаграммы на фиг. 2, когда моменты отрицательны. Манипулятор работает следующим образом. Тиристорным блоком 10 задают необходимую скорость вращения электродвигателя 6, которая через редуктор 7 и зубчатые колеса 8 и 9 передается планшайбе 3 с установленным на ней изделием 12, создающим дисбаланс относительно оси вращения планшайбы. Скорость вращения начинает увеличиваться и электродвигатель 6 переходит в режим генератора. Кинематическая энергия, обусловленная дисбалансом изделия, превращается в тепловзпо и выделяется на резисторе 11, служащим нагрузкой генератора, что создает дополнительный момент сопротивления движению, определяемый величиной сопротивления резистора 11 и скоростью вращения якоря электродвигателя 6 (фиг. 3 график 15).
Общий момент сопротивления (график 16) определяется суммарной величиной, т.е. моментами, соответствующими графикам 14 и 15, при этом увеличение скорости незначительно и на качество сварки не влияет.
Заштрихованная на-фиг. 3 зона определяет бе.сполезные потери электроэнергии, а следовательно,и более низкий КПД при применении самотормозящей червячной пары, обеспечивающей тормозной момент на всем диапазоне скоростей привода, по сравнению с червячной парой, угол подъема винтовой линии которой меньше угла трения покоя, но больше угла трения движения, с подключением постоянно резистора в цепь питания электродвигателя 6 параллельно его якорю.
По сравнению с базовым объектом предлагаемый манипулятор имеет меньшие энергозатраты при вращении изделия с дисбалансов.
| название | год | авторы | номер документа |
|---|---|---|---|
| Манипулятор для сварки | 1977 |
|
SU621517A1 |
| Манипулятор для сварки | 1978 |
|
SU712227A1 |
| Кантователь | 1973 |
|
SU475241A1 |
| Многопозиционный манипулятор | 1985 |
|
SU1263484A1 |
| Манипулятор для сварки | 1979 |
|
SU852479A1 |
| Манипулятор | 1980 |
|
SU872149A1 |
| Сварочный манипулятор | 1981 |
|
SU996156A1 |
| Манипулятор для сварки | 1980 |
|
SU975294A1 |
| Устройство для автоматической сварки криволинейных элементов | 1982 |
|
SU1041252A1 |
| Манипулятор для сварки труб | 1986 |
|
SU1360947A1 |
СВАРОЧНЫЙ МАНИПУЛЯТОР, содержащий планйгайбу для изделия, механизм ее поворота с червячной парой и электродвигателем постоянного тока и схему управления электродвигателем с тиристорным блоком, о т л и ч а ющ и и с я тем, что, с целбю снижения энергозатрат при вращении изделий с дисбалансом, червяк червячной пары выполнен несамотормозящйм, а схема управления снабжена резистором, подключенным параллельно якорю электродвигателя и тиристорному блоку. i (Л ОГ) vl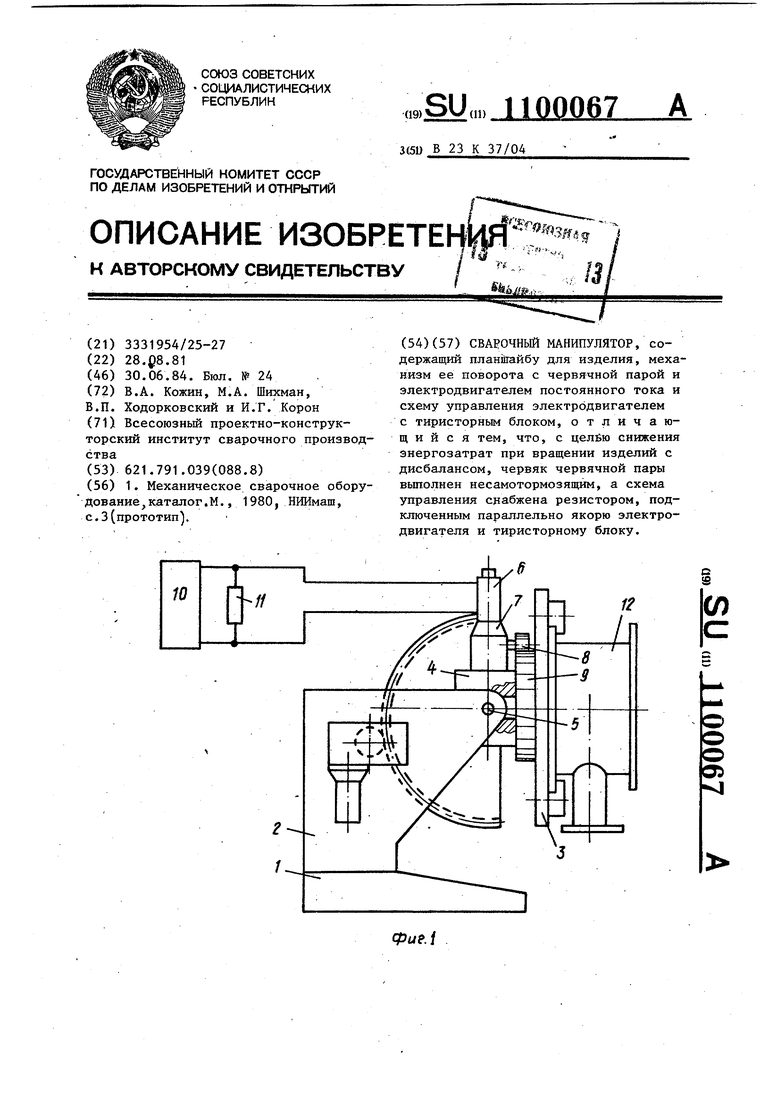
А/
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Механическое сварочное оборудование, катал ог.М | |||
| , 1980, НИИмаш, с.3(прототип). | |||
