Изобретение относится к машиностроению, а именно к сварочным манипуляторам для сборки и сварки металлоконструкций и перемещения их с одной технологической позиции на другую.
Известен сварочный кантователь, содержащий смонтированную на стойках поворотную раму с двумя рабочими позициями и механизм поворота рамы.
Недостатком известного кантователя является отсутствие возможности поворота обрабатываемых изделий «а каждой рабочей позиции.
Известен также сварочный манипулятор, выбранный в качестве прототипа, содержащий стойки, поворотную раму с двумя рабочими площадками, расположенными симметрично относительно оси вращения манипулятора и установленными с возможностью поворота на 360° вокруг своей продольной оси, механизм поворота рамы и механизм поворота рабочих площадок, выполненный в виде закрепленных на рабочих площадках полумуфт, установленных с возможностью взаимодействия с поджимными полумуфтами на одной из стоек; при этом каждая поджимная полумуфта связана с индивидуальными приводом посредством цепной передачи.
Известный сварочный манипулятор имеет недостатки. При сборке и сварке изделий, центр тяжести которых не совпадает с продольной осью площадки, возникает крутящий момент оси силы тяжести, который, после отвода поджимных полумуфт, может привести к самопроизвольному повороту изделия вместе с рабочей площадкой, что снижает надежность сварочного манипулятора. Положения поворотной рамы после поворота должны быть строго фиксированными, чтобы обеспечить соосность поджимаемых полумуфт и полумуфт, расположенных на рабочих площадках, и, кроме того, необходим специальный привод для поджима полумуфт, что усложняет конструкцию манипулятора.
Кроме того, во время каждого цикла сборки и , затрачивается время на
;;iii;i, и птиод поджимных полумуфт, что , )i,.)R производительность сварочьюго к .-1нипулято)а.
11ель изобретения - повышение надежности I обеспечения кантования изделия с центi V ;м i яжег.тм, смещенным относительно оси враLiiPimq рабочей площадки.
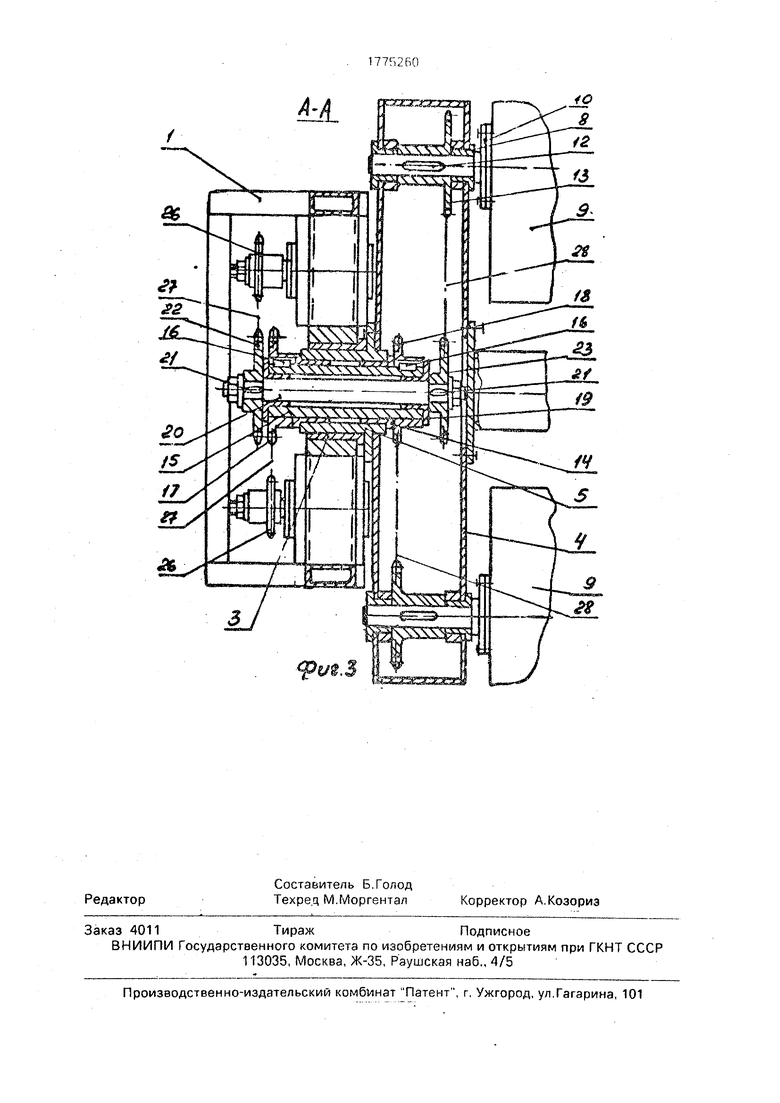
Из ()иг. 1 изображен предлагаемый манипулятор. оби),ий вид: на фиг. 2 -- то же, вид сГнжу: на фиг. 3 - разрез А-А на фиг. 1.
Сварочный манипулягор содержит две стой)-и 1 и 2, на которых с возможностью поворота на 180 в подшипниках 3 размещена поворотная рама 4с жестко закрепленными на ней по оси вращения рамы 15олой и.апфой 5 и .цапфой 6. На цапфе б жестко зок.репиеяя шестерня (i-sa чертеже не показана) зубчгзто-реечного механизма поворота рамы 7. На поворотной раме 4 симметрично относительно оси поворота рамы и с возможностью вращения относительно поворотной рамы 4 в подшипниках 8 установлены дре рабочие площадки 9. снабженные цапфами 10 и 11. На каждой цапфе 10 посредс( шпонки 12 жестко закреплена звездочка 13 (ведомое колесо). Внутри полой цапфы 5. с возможностью вращения в под1иипниках 14. размеиден полый вал 15, жестко связанный пог.редстЕюм шпонок 16 с ведомыми колесами (звездочками) 17, 18. Внутри полого вала 15 с возможностью вращения в подшипниках 19 размещен центральный вал 20. жестко связанный посредством ujnoHOK 21 с ведомыми колесами (звездочками) 22, 23. На стойке 1 смонг и р о в а н механизм поворота р а б С ч и х площадок, включающий два независимых самотормозящих оедуктора 24 с злектроДВИ1 а гелями 25 и ведущими колесами (звездочками) 26, Кахчдая звездочка 26 дополнителоного замкнутого .элеме1;тз посредством (цепи) 27 связана с однон из звездочек 17 или 22. Аналогично кйждая звездочка 13 посредством основного замкнутого гибкого элемента(цепи) 28 связана с одной из звездочек 18 или 23.
Свгэрной манипулятор работает следуюа1,им образом. На позициях 1 и II осуществляется сборка и сварка соответственно изделий на рабочих площадках 9. При этом каждая площадка 9 поворачиваться в удобное положение.
На позиции сборки 1 поворот рабочей площадки S осуществляется от одной из звездочек 26. приводимой во враидение двигателем 25 через редуктор 24, через цепь 27, 3:5ездочку 17, ПО/1ЫЙ Езап 15. звездочку 18. цепь 28 и звездоч у 13 (фиг. 2, фиг. 3).
Ни поз;-:ци11 сварки И .югаорот рабочей площади О Г1)опсходиг 01 ,другой зоездо-жи
26, приводимой во враидение двигателей 25 через редуктор 24. цепь 27. звездочку 22. центральный вал 20, звездочку 23, цепь 28 и звездочку 13.
Смена позиций (поворот рамы 4 в подшипниках 3) осуществляется от зубчатого реечного механизма 7. После смены позиций каждая рабочая площадка 9 может вновь устанавливаться в удобное положение, как описано выше.
Налич11е самотормозящего редуктора и постоянной кинематической связи каждой площадки с соответствующим приводом поворота позволяет обрабатывать на позициях сборки и сварки изделия, центр тяжести которых не лежит на оси вращения рабочей площадки, а также упростить конструкцию и повысить производительность манипулятора на 5-6%, Кроме того,предлагаемый сварочный манипулятор имеет еще одно преимущество: при повороте рамы кантователя (смена позиций) каждая рабочая площадка может или сохранять свое положение неизменным, или поворачиваться з ту или иную сторону на определенный угол, в зависимости от соотношения чисел зубьев звездочек, расположенных на рабочих площадках, и связанных с ними звездочек на центральном и полом валах. (При равенстве чисел зубьев рабочая площадка сохраняет свое положение).
Формула изобретения
Сварочный манипулятор, содержаи ий смонтировзнные на основании стойки с приводной осью, смонтированную на приводной оси раму с валами и рабочей площадкой на каждом валу, приводы вращения площадок с электродвигателем, ведущиг колесом на выходном валу злектродвигзтеля, ведомым колесом на валу рабочей площадки, замкнутыми гибкими элементами, расположенный на одной из стоек привод поворота рамы, отличающийся тем, что, с целью повышения надежности путем обеспечения кантования изделия со смещенным центром тяжести оти тсмтельно оси вращения рабочей площадки, ом оснащен установленными на другой стойке соосно с осью рамы полым валом и размещенным в нем центральным валом с расположенными по концам каждого ведомыми колесами и дополнительными гибкими элементами, при этом ведущее колесо электродвигателя привода одной рабочей площадки соединено дополнительным замкнутым гибким элементом с одним ведомым колесом центрального вала, основным замкнутым гибким элементом, второе Вс;домое колесо вали пр1.шода вргнцени.ч рабочих плош,адок соед1-,1-:е(1О с ведомым .колесом указанной рабочей площадки, ведущее колесо электродвигателя привода второй рабочей площадки соединено дополнительным замкнутым гибким элементом с одним ведо S П мым колесом пГЛого влпл. д полом ккопесо полого паля пс;иг)пнь|м T;U.IKHVV|M гибким элементом сое динено с ведомым ко/lecoM второй рабочей площд/1ки. € 7

| название | год | авторы | номер документа |
|---|---|---|---|
| Сварочный манипулятор | 1979 |
|
SU785004A2 |
| Кантователь для сборки под сварку | 1980 |
|
SU910388A1 |
| Узел задачи и выдачи кантуемого изделия в роторном кантователе | 1990 |
|
SU1738402A1 |
| Кольцевой кантователь | 1986 |
|
SU1362603A1 |
| КАНТОВАТЕЛЬ | 1998 |
|
RU2129087C1 |
| ПОДВЕСНОЙ МАНИПУЛЯТОР ДЛЯ КАНТОВКИ, ПРОТЯЖКИ, СБОРКИ, ЗАЛИВКИ ЛИТЕЙНЫХ ФОРМ И ВЫДАВЛИВАНИЯ ФОРМОВОЧНОЙ СМЕСИ И ОТЛИВКИ ИЗ ОПОКИ | 2004 |
|
RU2346789C2 |
| Устройство для кантования изделий | 1985 |
|
SU1265120A1 |
| Кантователь | 1982 |
|
SU1133066A1 |
| Кантователь крупногабаритных изделий | 1984 |
|
SU1326418A1 |
| Устройство для формирования слоя изделий | 1991 |
|
SU1828429A3 |

Использование: для кантования изделий с центром тяжести, сменным относительно оси вращения площадки. Сущность изобретения; сварочный манипулятор содержит две стойки, поворотную раму с двумя рабочими площадками, механизм поворота рамы. Манипулятор оснащен со- осно расположенными центральным и полым валом. При этом один конец каждого вала через гибкую связь соединен с соответствующей рабочей площадкой, а другой конец - через другую гибкую связь - с соответствующим приводом поворота рабочей площадки. 3 ил.
| Сварочный манипулятор | 1979 |
|
SU785004A2 |
| Прибор для равномерного смешения зерна и одновременного отбирания нескольких одинаковых по объему проб | 1921 |
|
SU23A1 |
| Дверной замок, автоматически запирающийся на ригель, удерживаемый в крайних своих положениях помощью серии парных, симметрично расположенных цугальт | 1914 |
|
SU1979A1 |
