(54) РОЛИКОВЫЙ МАНИПУЛЯТОР

| название | год | авторы | номер документа |
|---|---|---|---|
| Роликовый манипулятор | 1976 |
|
SU716756A1 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОЙ СВАРКИ ДЕТАЛЕЙ | 1969 |
|
SU251119A1 |
| Устройство Петрова для сборки и сварки кожухов центробежных вентиляторов | 1985 |
|
SU1291344A1 |
| Автомат Петрова для сборки и сварки кожухов вентиляторов | 1985 |
|
SU1368146A1 |
| ЛЕСТНИЧНЫЙ ПОДЪЕМНИК ДЛЯ ИНВАЛИДОВ | 1997 |
|
RU2116238C1 |
| СТРУГОВЫЙ КОМПЛЕКС, СЕКЦИЯ КРЕПИ, УСТАНОВКА СТРУГОВАЯ, БАЗА СТРУГОВАЯ, ПРИВОД СТРУГА, ПЕРЕГРУЖАТЕЛЬ УКОРОЧЕННЫЙ, КРЕПЬ СОПРЯЖЕНИЯ, МАНИПУЛЯТОР ПЕРЕДВИЖНОЙ | 1999 |
|
RU2163970C1 |
| Автомат Петрова для сборки и сварки кожухов центробежных вентиляторов | 1983 |
|
SU1138284A1 |
| Устройство для установки труб в трубные решетки теплообменников | 1983 |
|
SU1186452A1 |
| Установка для контактной сварки крупногабаритных изделий | 1979 |
|
SU897437A1 |
| УСТАНОВКА ДЛЯ СВАРКИ СЕКТОРОВ ОТВОДОВ ТРУБ | 2021 |
|
RU2780860C1 |

Изобретение относнтся к области сварки, в «ajJTHOCTH к устройствам для сварки фланцев с днищем или обечайкой и установки изделия в положение, удобное для производства сварочных работ.
Извеспю устройство для сварки фланцев с обечайкой, содержащее поворютную в вертикальной плоскости планшайбу, в направляющих которой установлены карегки, .несущие опорные двухребордные ролики с цилиндрической ступицей и 1ФНВОДЫ для раздельного перемещения роликов, и привод для врахцения этих роликов.
Однако в известном устройстве направляющие для пер ;мещения кареюк с опорными роликами расположены по прямоугольному контуру, что вызьшает необходимость применения нескольких приводов для перемещения кареток и привода для вращния роликов, при этом известное устройство не обеспечивает достаточной надежности фиксации изделил, так как наличие неплоскостности фланца может вызьшать заклинивание фланца между ребордами опорных роликов, а также проскальзывание этого фланца относительно ступицы ролика вследствие малого коэффициента трения.
Известен роликовый манипулятор, содержащий поворотную в вертикальной плоскости планшайбу, в радиальных направляющих которой установлены каретки, несущие опорные двухребордные ролики с цилиндрической ступицей.
Недостатком известного роликового манипулятора также является недостаточная надежность фиксации из-за неравномерности перемещения всех роликов, а также вследствие заклчнивания флавда изделия между ребордами опорных роликов и проскальзывания этого фланца относительно ступицы опорного ролика.
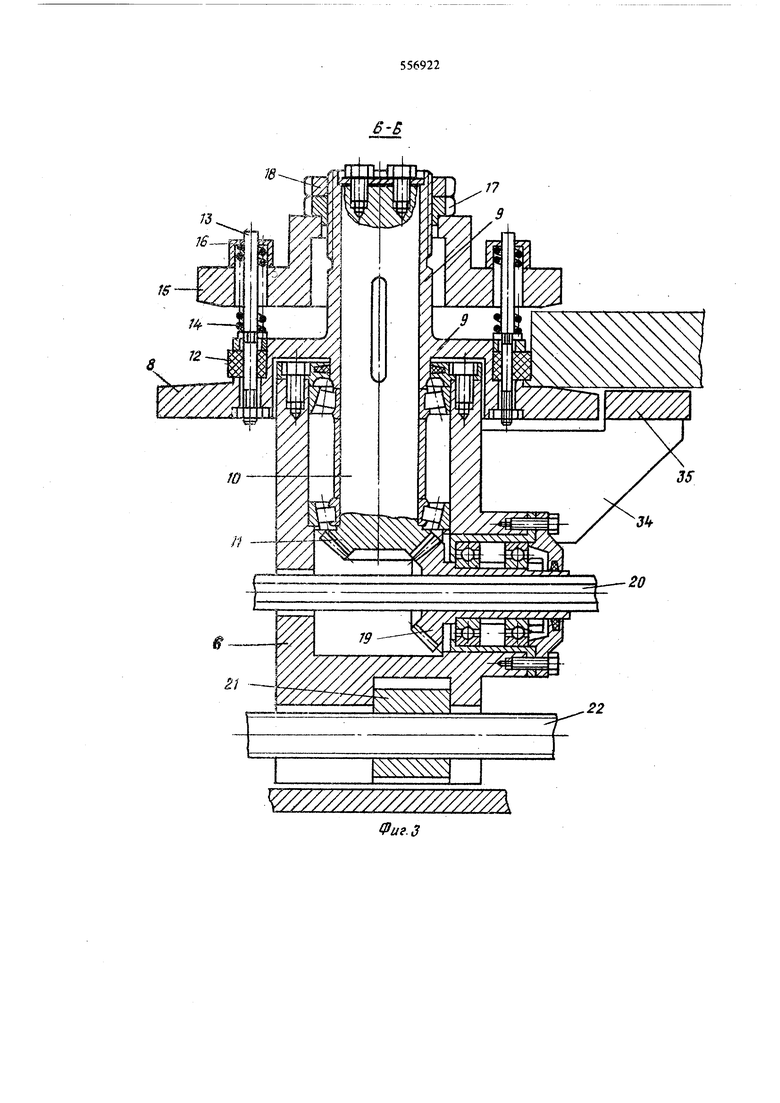
Целью изобретения является увеличение надежности фиксации изделия на манипуляторе. Для этого предлагаемый магатулятор оснащен приводом для одновременного перемещения и вращения всех опорных роликов, смонтированным в центре планшайбы. Каждая каретка имеет жестко закрепле1шьш на ней опорный кронщтейн, слорные ролики снабжены эластичными кольцами, смонтированными на их стутшцах, а одна из реборд каждого опорного ролика установлена с возможностью перемещения вдоль оси ролика и подпружинена относительно второй реборды. Шфнг. 1 изображен роликовый манипулятор, общий вид; на фиг. 2 то же, вид по стрелке А на фш-i Г; .на фиг. 3 - сечение по Б-Б на фиг. 2; на фиг, 4- кинематическая схема 1фивода для перемещ .щя кареток и вращения опорных роликов. Роликовый манипулятор состоит из поБО рЬтной в 0«ртик(1:аной плоскости планшайбы 1, представляющее собой симметричную решетчатую платформу, на которой жестко закреплены направлякпцие 2, расположенные рашшшно. Рама i опирается на стойки 3, на одной из которых жестко закреплен привод ее поворота. 4 с редук торрм 5. В направ: ляющих 2 установлены с возможностью перемещения вдоль них каретки 6. На каждой из зтих кареток смонтирован шорный ролик с ребордои 8. Ось этого ролика расположена перпендик лярно раме 1. Ступица9 ролика жестко соединена с валом 10, соединенным с коническс шестерней 11. На ступице 9 ролика закреплено колы 12 из эластичного материала. На реборде 8 ролика закреплены пальцы 13, пропущенные через эластичные КОЛЫ 12 и имеющие пруяшнь 14. Прижимная реборда 15 ролика установлена с возможностью перемещения вдоль вала 10 и пальцев 13 i оснащена стакашиуш 16, дно которых взаимодействует с пружиной 14. Ход пртжимкой реборды 15 ограничивается гайками 1 и 18, установленными на валу 10. Конические шестерни 11 взаимодействуют с ко; иическими шестернями 19, установленными на Шшщевых валах 20, а на каретках 6 смонтированы гаКки 21, взаимодействующие с ходовыкш винтами 22, расположенными под шлицевыми валами 20. Ходовые винты 22 и валы 20 установлены в радиальных направляющих 2 планшайбы 1, в которой смонтирован привод для одновременного перемещения и вращения всех опорных роликов. Этот привод состоит из электродвигателя 23 и редуктора 24, выходной вал 25 которого расположен перпеидикулярно плоскости планшайбы 1 и оснащен коническими шестернями 26 к 21 п двухсторонней сцепной муфтой 28. Шестерни 26 и 2 вьто1$вены с полумуфтами 29 и 30. Шесте 26 взаимодействует с шестернями 31 винтов 22, а шестерня 2 - с шестернями 32, устаяовлешыми на валах 20. Для переключения муфты 28 предусмотрен электромагнит 33. На каретках 6 закреплены кронштейны 34 с оао1жыми площадками 35, расположенными параллельно плоскости планшайбы 1. Роликснвьп манипулятор работает следующим Образом, Включением электродвигателя 5 планшайбу 1 устаИавливают в горизонтальное положение так, чтобы опорные ролики находились сверху. Муфту 28 вводят в зацепление с шестерней 26 и включают злек юдвигатеш) 23, вращаюш;ий через муфiy 28, когашеское колесо 26 и шестерни 31 ходовые винты 22. И этом карежи 6 движутся по ншравляющим 2, Электродвигатель 23 отключают тогда, когда площадки 35 установятся в положение, удобиое для установки фланца изделия. Затем вновь включают элекгродвигатель23 и окончательно сдвигают к центру планшайбы 1 каретки 6 до соприкосновения эластичных колец 12 роликов с фланцем изделия, при этом реборды 8 займут положение под фланцем, приподнимая его над площадкой 35, После этого посредством гайки 1 устанавливают прижимную реборду 15 так, чтобы зазор между ней и фланцем изделия соответствовал до пускаемой неплоскостиости изделия. Включают двигатель 4 и устанавливают планшайбу 1 в положение, удобное для сварки наружного шва днища с фланцем, муфту 28 вводят в за1|ешение с коничеосой шестерней 2 и включают электродвигатель 23, вращающий в этом положении муфты опоршле ролики и изделие. Ц)оизводят сяарку. Отключают двигатель 23, включают привод 4 и повора шают планшайбу в положение, удобное для сварки внутреннего шва, отключают привод 4, включают вновь электродвигатель 23 и, вращая изделие, производят сварку внутреннего шва. По окончании сварки включением двигателя 5 планшайбу 1 поворачивают так, чтобы изделие оказалось сверху. Затем муфту 28 вводят в зацепление с шестерней 26, и каретки 6 с опорными роликами раздвигают до тех пор, пока изделие полностью не ляжет на площадки 35, а реборды 8 и 15 полностью не выйдут за периметр фланца изделия: Электродвигатель 23 отключают, и готовое изделие снимают с манипулятора. В связи с тем, что ролики манипулятора сб1Шжаются к центру синхронно, значительно облегчается установка на свариваемого изделия. Радиальное переме1цение роликов позволило njaiiyjemiib единый привод как дая перемещения, так и для (ения роликов, то значительно ynpoiitaeT конструкцию манипулятора и уменьшает опрокидывающие моменты от свариваемых изделий, действуницие на манипулятор. Применение опорных роликов с эластичным кольцом и прижимной ребордой, установленной с зазором, позволило исключить проскальзывание опорных роликов при вращении изделия и заедание фланца изделия между ребордами из-за его йеплоскостности. Формула изобретения манипу.1ятор, преимущественио для сварки фланцев с обечайкой, содержащий поворотную в вертикальной плоскости планшайбу, в радиальных направляющих которой установлены каретки, несущие опорные двухребордиые ролики с цилиндрической ступицей, отличающийся тем, что, с целью увеличения надежности фикса1|р и изделия, манипулятор оснащен приводом одновременного перемещения и враи1ения веех опорньп {юлик6в,смонтироваша 1м в центре планшайбы, при этом каждая каретка оснащена жестко закрепленным ва ней спорным кронштейном, опорные ролики снабжены эластичными кольцами, смонтированными на их ступицах, а одаа из реборд каждоФиг. 2 го опорного ролика установлена с возможностью перемещения вдоль оси ролика и подпружинена относи тельно второй реборды.
Фиг.З
