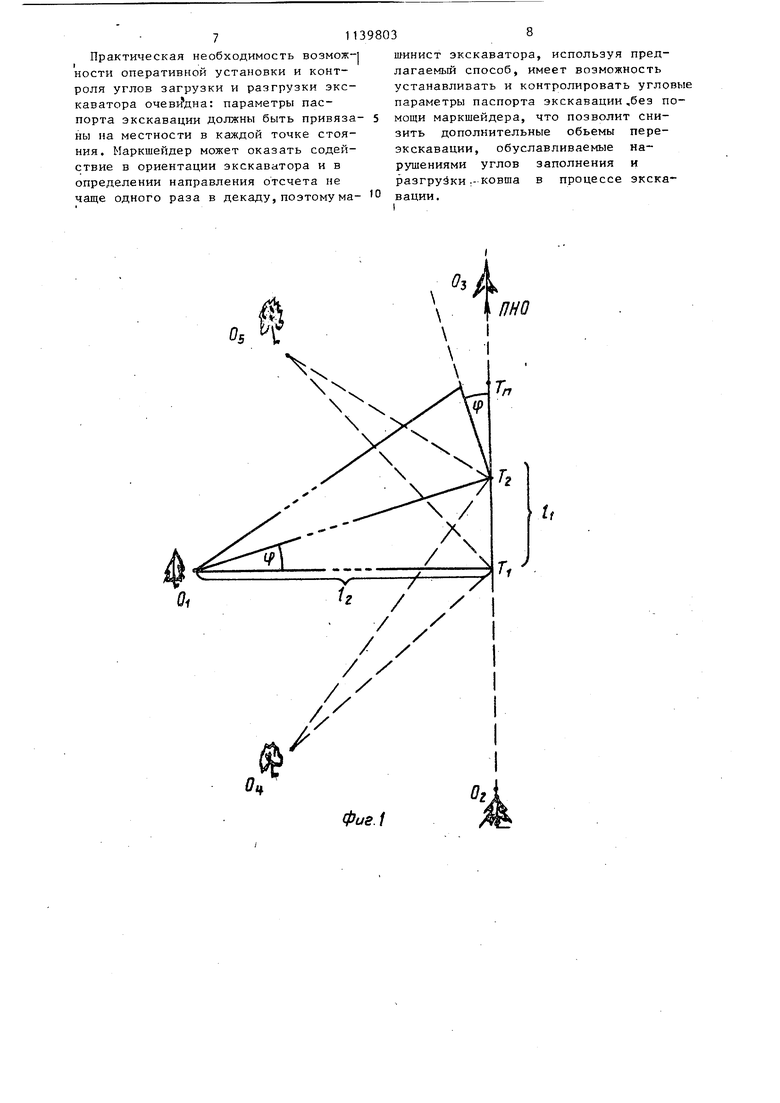
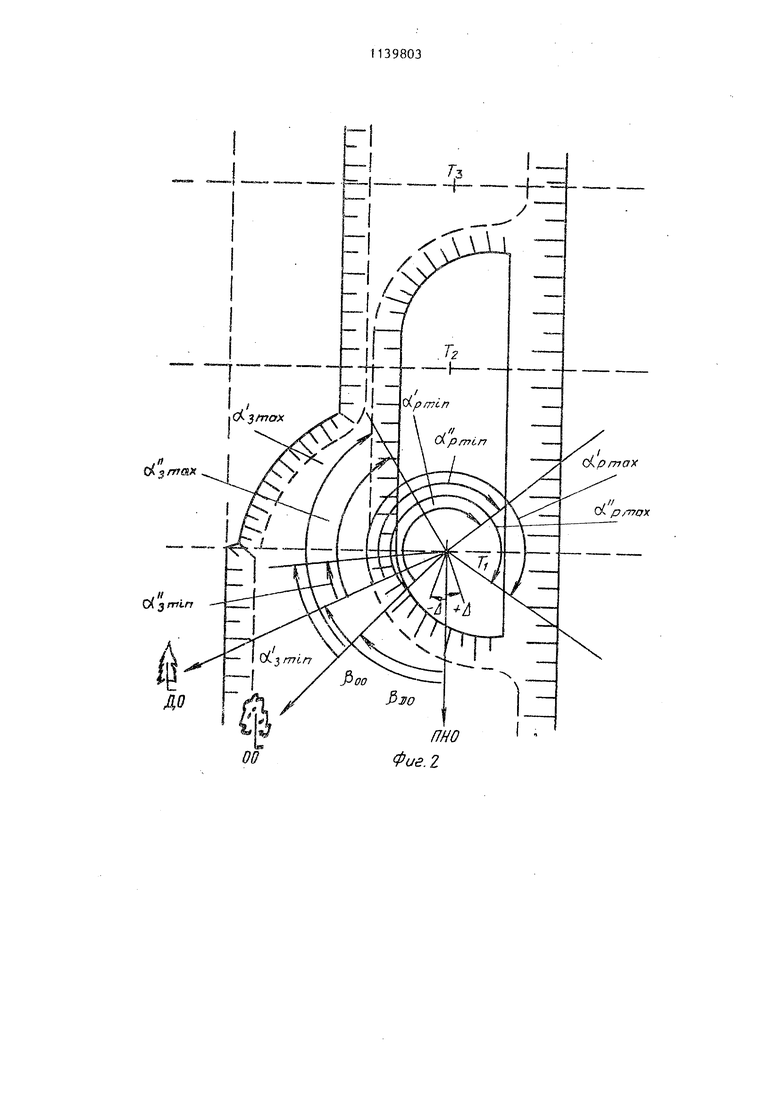
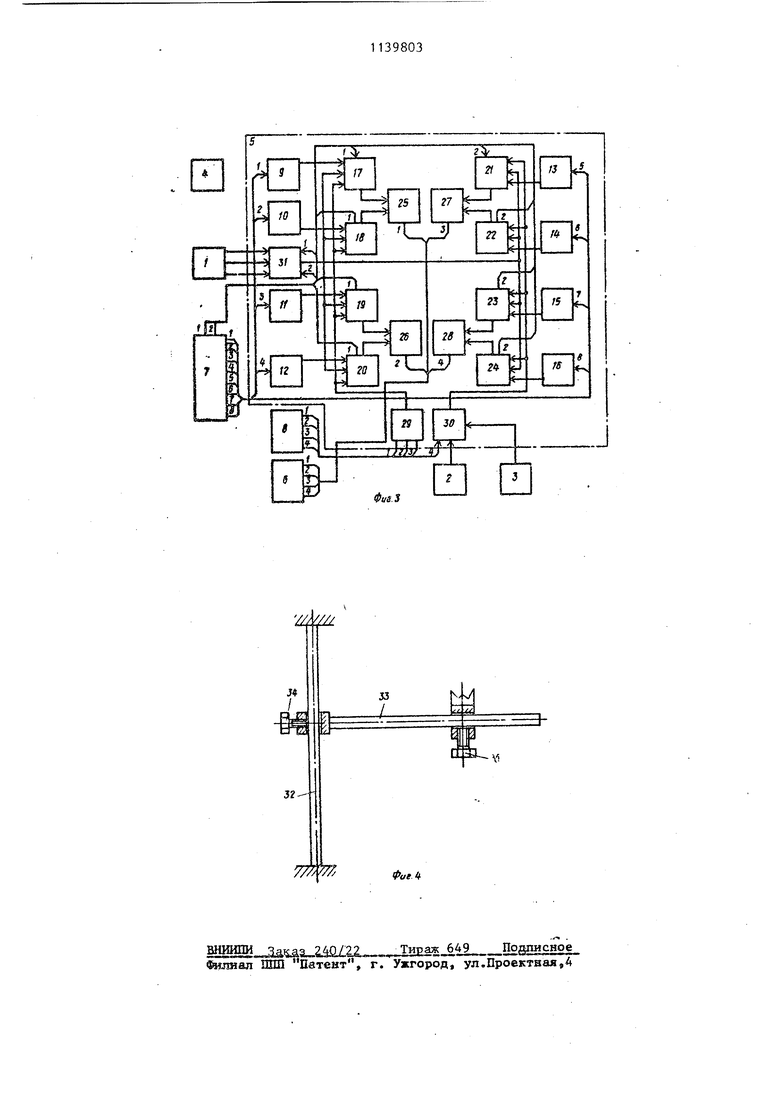
1 Изобретение относится к области автоматического измерения параметров работы экскплатора-драглайна при вы полне1И1Н вскрьпиных бестранспортных работ и, ггредназ.чачйется для ориента ции экскаватора при измореHISH и оператипиом контроле углов поворота глатформы зкскавятора-драглайна в процессе экскавации. Известе.ч способ для измерения и контроля углов поворота поворотной платформы одноковпюпых экскаваторов 1 . Наиболее близким к предлагаемому является способ, реализованный в уст ройстве дпя измерения и контроля углов поворота платформы экскаваторадраглайна при выпольении вскрглиньк бестранспортных , в котором предусмотрена ориентация экскаватора в выбранном } аправлении в исходно точке стояния 5 установка начала отсчетов углов загрузки и разгрузки ковша, измерение фактических углов поворота платформы при заполнении и разгрузке ковша в процессе экскава ции, определение отклонения фактических углов поворота платформы от установленных углов загрузки и разгрузки ковша, коррекция точки отсче та углов загруз си и 1-)азгрузки ковша в кал.лой очередной точке стояния. Сп соб обеспечивает измерение фактических углов загрузки и разгрузки ковта отсчитанных от выбранного наг равлени сохранение первоиалгальной ориентап,ии экскаватора в с гередной точке стояния за счет измерения i-; учета угла поворота базы экскаватора оть-оситель ко поворотной платф(5рмы при шагании экскаватора 2J, Однако5 во-первьх, на рыхлых или заснеженных грунтах в процессе экска вации возможны прОБОроть базы относи тельно почвы вследствие резкого торможения или разгона поворот1юго ме ханизма5 эти провороты имеют систематический характер (обычно направле ны в одну сторону) п яьзыпают смеще ние нулевой отсчета угла вовторых., в nsBecTHON способе необходимо делать метки на базе и, поворот 1юй платформе экскаватора, по которым устанавливают начальную точку от счета при переходе в новую точку ст ЯНИ7Т. эти метки недолговечньь чгисло их возрастает в процессе эксплуатаци и возможны ошибки при их исгюльзова ниИу кроме ТОГО; их иагчесение услож 032 ияет эксштуатацик) экосаватора, реализации известного способ ь проязводствеНнь х условгтях, когг;а наблго/даются частые обесточипания оксканатора (а следовательно, и агил.штуры) восстановление необходи юй .риеьтации экскаватора без помощи маркпгейдера невозможно. При сбоях аппаратуры по различным причинам проверка достоверности ее показаний также невозможна без помощи маркшейдера. Цель изобретения -- упрощение и повь шение достоверности контроля. Поставленная цель д,остигается тем, что согласно способу контроля углов поворота платформы экскаватора-драглайна при выполнении вскрышных бестраншейных работ, основа И1ом на ориен тации экскаватора в выбранном направлении в исходной точке стояния, установке начала отсчетов углов загрузки и разгрузки ковша, измерении фактических углов поворота платформы при заполнении и разгрузке ковша в процессе экскавации и определении отклонения фактических углов поворота платформы от установjteHjihJx углов загрузки и раз)рузки ковша, фиксируют в исходной точке стояния ориентацию экскаватора по отношению к основному ориентиру, ориентируют экскаватор поворотом r лaтфop tы относительно дополнительного ориентира, фиксируют орие {тацию экскаватора относительно дополнительного ориентира устанавливают начало отсчета углов загрузки и разгрузки ковша соответственно относительно направлений на основной и дополнительный ориентиры, а в последующер точке стояния ориентируют экскаватор поворотом платформы относительно основного или л.ополнительного ориентира и соответственно принимают начало отсчетов углов загрузки и разгрузки ковша от этих направлений . I В предлагаемом способе обеспечивается зозможность ориентации экскаватора в лн:1бой очередной точке стояния,, что в свою очередь позволяет обеспечить привязку углов загрузки и разгрузки к принятому направлению отсчета. На фиг. 1 приведена схема расположения ориентиров; на . 2 схема углов загрузки и разгрузки ковша; на ф1-1г. 3 блочная схема устройства, реализующего способ; на фиг.4 схема узла устройства (прицельного , приспособления). В предлагаемом способе обеспечивается возможность ориентации экска ватора машинистом в любой очередной точке стояния и привязка углов загру ки и разгрузки к принятому направле отсчета. Действительно, пусть в точ . ке стояния Т (фиг. 2) углы между принятым направлением отсчета (ПНО) и направлениями на основной ориенти (00) и дополнительньй ориентир (DO) соответственно равны ,ftj)QУглы, определяющие сектор загрузки ковша, отсчитанные от 00 равны Imin о равны соответст венно , оО Аналогично опреде лены углы разгрузки ковша, отсчитанные от 00 - atpmin, , от ДО pmin pmciic Поскольку в начальной точке стояния после установок направ лений отсчетов и углов загрузки и ра грузки, ковша могут произойти их иска жения или потеря (например, при обес точивании экскаватора), то машинист без помощи маркшейдера всегда может восстановить заданную ориентацию экс каватора и соответственно точку отсчета углов поворота платформы при заполнении и разгрузке ковша. При перемещении экскаватора в очередную точку стояния (например, Т) точка отсчета углов может произвольно сместиться, поскольку база при перемещении проворачивается, т.е. ПНО изменится на угол t Л . Соответственно изменится и направление отсчета на ОР или ДО. Однако при ориентации на этой точке стояния с помощью прицельного приспособления можно исключить угол и восстановить прежнюю точку отсчета. Следовательно, в любой последующе точке стояния, Т, Т и т.д. машинист экскаватора, устанавливая экска ватор по одному из ориентиров, без помощи маркшейдера может обеспечить заданную ориентацию экскаватора и установку границ зон загрузки и разгрузки ковша. Дополнительный ориентир предназна чается для использования в тех случаях, когда с очередной точки стояни .по каким-либо причинам не виден или плохо виден основной ориентир (временный выход из зоны видимости, наблюдение ориентира против солнца, малая освещенность и т.п.). Таким образом, обеспечивается упрощение ориентации экскаватора на ново,й точке стояния и надежность контроля установленных углов поворота ; платформы при загрузке и разгрузке, ковша, что позволяет практически реализовывать расчетные параметры технологической схемы. Схема устройства, реализующего предлагаемый способ (фиг.3),содержит реверсивньй датчик 1 угла поворота платформы экскаватора, датчики длины тягового 2 и подъемного 3 канатов, прицельное приспособление 4, вычислитель 5, выходной индикатор 6, пульт 7ввода исходных данных. Датчики 1-3, пульт 7 ввода и выходной индикатор 6 связаны с .вычислителем 5, который подключен к блоку 8 управления приводами экскаватора. Вычислитель 5 включает элементы 9-16 памяти, элементы 17-24 сравнения, логические элементы 1ШИ 25-28, узел 29 определения операции заполнения ковша, узел 30 определения операции разгрузки ковша, реверсивный счетчик 31. Элементы 9-16 подключены входами к соответствующим выходам пульта 7 ввода, а их выходы связаны с соответствующими входами элементов 17-24 сравнения. Другие входы элементов 17-24 сравнения подключены к выходу реверсивного счетчика 31, входы которого связаны с реверсивным датчиком 1 и пультом 7 ввода. Третьи входы элементов 17-20 сравнения связаны с выходом узла 29, третьи входы элементов 21-24 сравнения подключены к выходу узла 30. Четвертые входы элементов 17-24 подключены к соответствующим выходам пульта 7 ввода. Выходы элементов 17-24 через соответствующие элементы ИЛИ 25-28 подключены к блоку 6 индикации. Входы узла 29 связаны с соответствующими выходами блока 8 управления, а входы узла 30 подключены к выходам датчиков 2 и 3 и к соответствующему выходу блока 8управления. Прицельное приспособление 4 (фиг. 4) включает направляющую 32, неподвижно прикрепленную к корпусу кабины машиниста экскаватора, например к переплету рамтл переднего смотрового стекла кабины, подвижный шток 33 с фиксатором 35. J11 Устройство работает следующим образом. Б начальной точке стояния машинист экскаватора с пом(51цью маркшейде ра ориентируют экскаватор относитель но принятого направлени} отсчета и наводит прицельное приспособление 4 в основной ориентир, фиксируя его положение фиксаторами 34 и 35. После этого мaшин cт экскаватора устанавлипает в пульте 7 заданные значенияс/,т1л1, ct max, J р min, cip max, которые вводятся в элементь 9-12. За тем машинистом вводятся значения o/lmin, з J max, ( р min , oip max, которые хаГактеризуют углы загрузки и разгрузки, отсчитанные от дополнительного ориентира ДО. Затем машинис.т экскаватора наводит прицельное приспособление на 00 или ДО и формирует соответствуюи1ий сигнал начала отсчета углов Sign 00 1 или Sign ДО Если сформирован сигнал Sign 00 1 то разрешается работа элементам 1720, а реверсивный счетчик 31 обеспечивает отсчет угла с/.; от направления на основной ориентир. На выходе элемента 17 формируется сигнал нарушения левой границы зоны загрузки Sign 1ШГЗ 1, если oL; при загруз ке ковша, т.е. при Sign , меньше ct, . На выходе элемента 18 формируется сигнал наруишния правой гра ницы яоны загрузки Sign НПГЗЗ 1, если при загрузке ковша больше i гпик При разгрузке ковша, т.е. при Sign Р 1 на выходе элемента 19 формируется сигнал нарушения левой границы зоны разгрузки Sign НЛГР 1, если d ; при разгрузке меньше cL элемента 20 выходе Нормируется сигнал нарушения праBofi границы зоны разгрузки Sign 1, если cij при разгрузке больше ci-p Указанные выходные сигналы через элементы ИЛИ 25 и 26 поступают на блок 6 индикации. В соответствии с информацией 6 индикации машинист принимает реи;ение по управлению экскаватооом. Если же в пульте ввода сформирован сигнал Sign ДО 1,то аналогично вышеописанному функционируют элементы 13-16, 21-24, 27 и 28. Узел 29 формирует Sign 3 1 при одновременном выполнении условий ие чодъкмпом канате. постоянная электродвигателя механизма подъема ковша; токи якоря и цепи возбуждения двигателя меха}1изма подъема ковша; диаметр барабана подземной лебедки; при условии вращения двигателя механизма тяги в направлении, обеспечиваюшем наматывание каната на бараб ан -, при уаПОВИИ 7, IT-,; фактический и номинальный токи якорной цепи двигателя механизма тяги ковша; собственный вес ковша. ирует Sign Р 1 при ыполнении условий - Ll ;(4) при уме)1ьшении величины Ij ниже его номинального значения т,; расстояние между точками схода тягового и подъемного канатов с направляющих шкивор; длина свешивающихся частей подъемно1о и тягового канатов. 711 Практическая необходимость возможIиости оперативной установки и контроля углов загрузки и разгрузки экскаватора очевр дна: параметры паспорта экскавации должны быть привяза ны на местности в каждой точке стояния. Маркшейдер может оказать содействие в ориентации экскаватора и в определении направления отсчета не чаще одного раза в декаду, поэтому ма 3 шинист экскаватора, используя предлагаемый способ, имеет возможность устанавливать и контролировать угловые параметры паспорта экскавации ,без помощи маркшейдера, что позволит снизить дополнительные обьемы переэкскавации, обуславливаемые на рушениями углов заполнения и разгрузки .-ковша процессе эксканации.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ автоматического учета основных показателей работы драглайна | 1986 |
|
SU1421830A1 |
| Устройство для измерения и контроля углов поворота платформы экскаваторадраглайна | 1978 |
|
SU747943A1 |
| Устройство для контроля работы экскаватора-драглайна | 1976 |
|
SU643597A1 |
| Способ контроля процесса заполнения ковша-экскаватора-драглайна | 1985 |
|
SU1298311A1 |
| Способ управления разгрузкой ковша экскаватора-драглайна | 1985 |
|
SU1263761A2 |
| Способ оценки качества управления экскаватором-драглайном | 1985 |
|
SU1344868A1 |
| Способ определения положения экскаватора-драглайна в пространстве | 1983 |
|
SU1121356A1 |
| Способ управления разгрузкой ковша экскаватора-драглайна | 1987 |
|
SU1502723A1 |
| Способ автоматического учета основных показателей работы драглайна | 1983 |
|
SU1170058A1 |
| Способ контроля работы экскаватора-драглайна | 1983 |
|
SU1129398A1 |
СПОСОБ КОНТРОЛЯ УГЛОВ ПОВОРОТА ПЛАТФОРМЫ ЭКСКАВАТОРА-ДРАГЛАЙНА ПРИ ВЫПОЛНЕНИИ ВСКРЫШНЫХ БЕСТРАНСПОРТНЫХ РАБОТ, основанный на ориентации экскаватора в выбранном, направлении в исходной точке стояния, .установке начала отсчетов углов загрузки и разгрузкиковша, измерении фактичес- ; ких углов поворота платформы при заполнении и разгрузке ковша в процессе экскавации и ощзеделении отклонения фактическргх углов поворота платфop IЫ от установленных углов загрузки и разгрузки ковша, отличающийся тем, что, с целью упрощения и повышения достоверности контроля, фиксируют в исходной точке стояния ориентацию экскаватора по отношению к основному ориентиру, ориентируют экскаватор поворотом платформы относительно дополнительного ориентира, фиксируют ориентацию экскаватора относительно дополнительного ориентира, устанавливают начала отсчетов 5 углов загрузки и разгрузки ковша соответственно относительно направлений на основной и дополнительный . ориентиры5 а в каж.цой последующей точке стояния ориентируют экскаватор по- С: воротом платформы относительно ос «iedL новного или дополнительного ориентира и соответственно принимают начала отоэ счетов углов загрузки и разгрузки ковша от этих направлений.
О
Фие.1
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ и УЧЕТА РАБОТЫ ЭКСКАВАТОРА-ДРАГЛАЙНА | 0 |
|
SU384112A1 |
| Способ восстановления хромовой кислоты, в частности для получения хромовых квасцов | 1921 |
|
SU7A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Устройство для измерения и контроля углов поворота платформы экскаваторадраглайна | 1978 |
|
SU747943A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| ; | |||
