Изобретение относится к области автоматического контроля и учета работы шагающих экскаваторов-драглайнов, используемых при ведении открытых горных работ и строительстве различных сооружений, связанном с проведением значительного объема работ по перемещен1ш грунта.
Известно устройство, обеспечивающее контроль выполнения элементов цикла экскавации, пра этом погкчитывается количество циклов экскавации с установленным уровнем загрузки кавша н время работы экскаватора в режиме экскавации 1. Однако в автоматизированной системе управления технологическим процессом бестрансоортной перевалки необходимо контролировать и учитьтать ряд других параметров: угол экскавации (средний, минимальный, максимальный), выполне{шый объем экскавации в тоннах или кубометрах, траекторию перемещения экскаватора и ее параметры. Такое устройство не обеспечивает контроля основных технологических параметров процесса зкскававди.
Известно ycтpoйcтвo обеспечивающее измерение веса горной массы в каждом цикле экскавадин с последующим суммированием, измерение и суммирование угла поворота платформы в процессе экскавации {2. Однако и это устройство не обеспечивает формирования данных о расположении экскаватора на плане горных работ и конт1)оля основных технологическ11х параметров процесса экскавации.
Наиболее близким к изобретению является устройство для контроля работы экскаватора-драглайна, содержащее датчики длин тягового и подъемного канатов, связанные с блоком фиксации области пространства, который подключен к одному из входов блока измерения величины загрузки ковша, к другим входам которого подключены датчик веса и логический блок, соединенный с блоком фиксации области пространства и блоком измерер}ия угла поворота платформы, к входу которого подключен датчик угла поворота, а выходы блока измерения угла поворота платформы, блока измерения величи загрузки ковша и логического блока подключены к выходному блоку 3. Такое устройство обеспечивает измерение и учет количества перемещенной горной массы в тоннах, суммарного угла
оворота платформы экскаватора, измерение выоты подъема ковша в процессе экскавации. днако оно не позволяет измерять и учитьшатъ акие важные параметры те хнологического проесса перевалки, как дугу перемещения горной s массы или угол экскавации (средний, минимальный, максимальный) и траекторию перемещения экскаватора.
Предлагаемое устройство снабжено блоками задания технологических параметров работы и so измерения траектории движения экскаватора, входы которых подключень к блоку измерения угла поворота платформы, а выходы - к выходному блоку, причем к другим входам блока измерения траектории движения экскаватора is подключены выходы логического блока. При этом блок задания технологических параметров работы содержит задатчики средних значений углов заполнения и разгрузки ковша, четыре схемы И, схему ИЛИ, замыкающую кнопку и два 20 триггера, входы одного из которых через схемы И подключены к задатчикам минимальных и максимальных углов заполнения ковша, а входы второго триггера через схемы И подключены к задатчикам минимальных и максимальных углов 25 разгрузки ковша, причем выходы задатчиков максимальных углов заполнения и разгрузки ковша подключены через схему ИЛИ к замыкающей кнопке. Блок измерения траектории движения ковша содержит три схемы И, пороговый 30 элемент, вгремязадерживающий элемент и счетчик, к входу которого через одну из схем И подключены выходы порюгового элемента и времязадерживающего элемента, вход которого соединен с соответствующими входами двух других js схем И.
Это позволяет задавать и контролировать параметры технологического процесса бестранспортной перевалки (угол погрузки ковша - максимальный, минимальный, средний; угол раз- 40 грузки ковша - ма1ссимальный, минимальный, средний; траекторию движения экскаватора - число шагов и направление каждого шага), то в условиях отсутсгаия обозримости всего фронта работ при значительном числе одновременно работающих экскаваторов, характеризующихся разЛищюй производительностью, связанной с техническими характе ристаками экскаваторов и технологическими причинами, и при необходимости организации тесного взаимодействия экскавз- 50 торов в случае многократной перевалки горной массы позволяет с большей технико-экономической эффективностью управлять технологическим щюцессом экскавации.
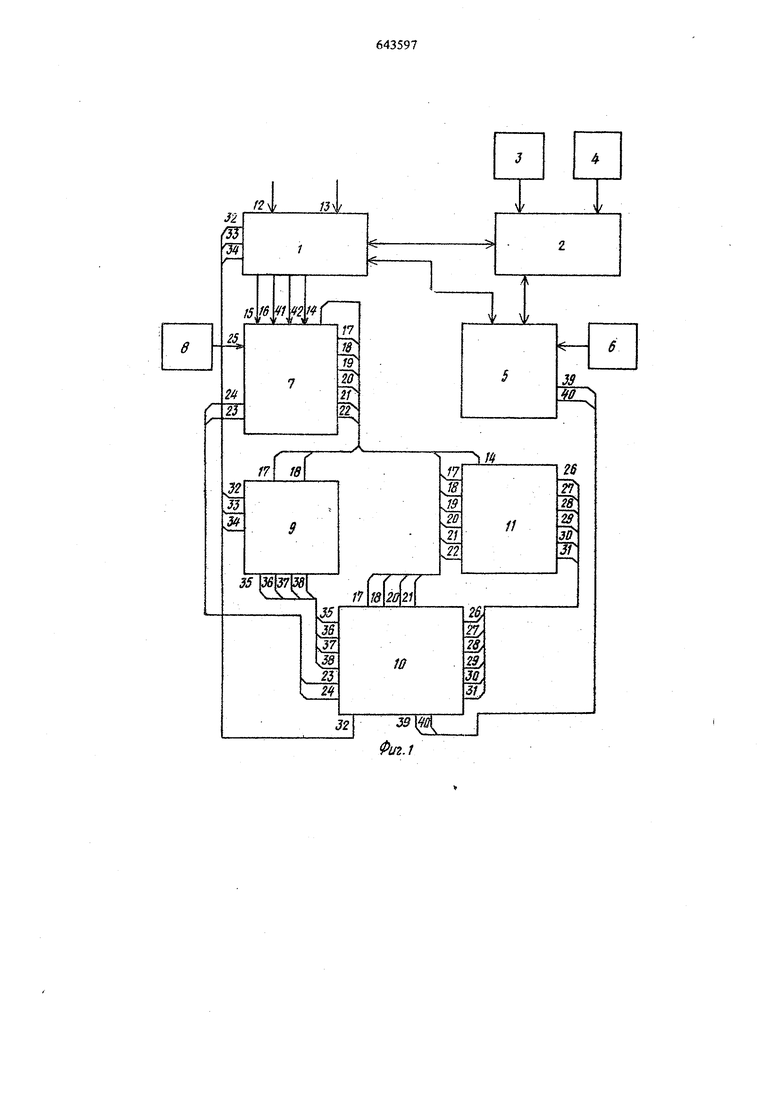
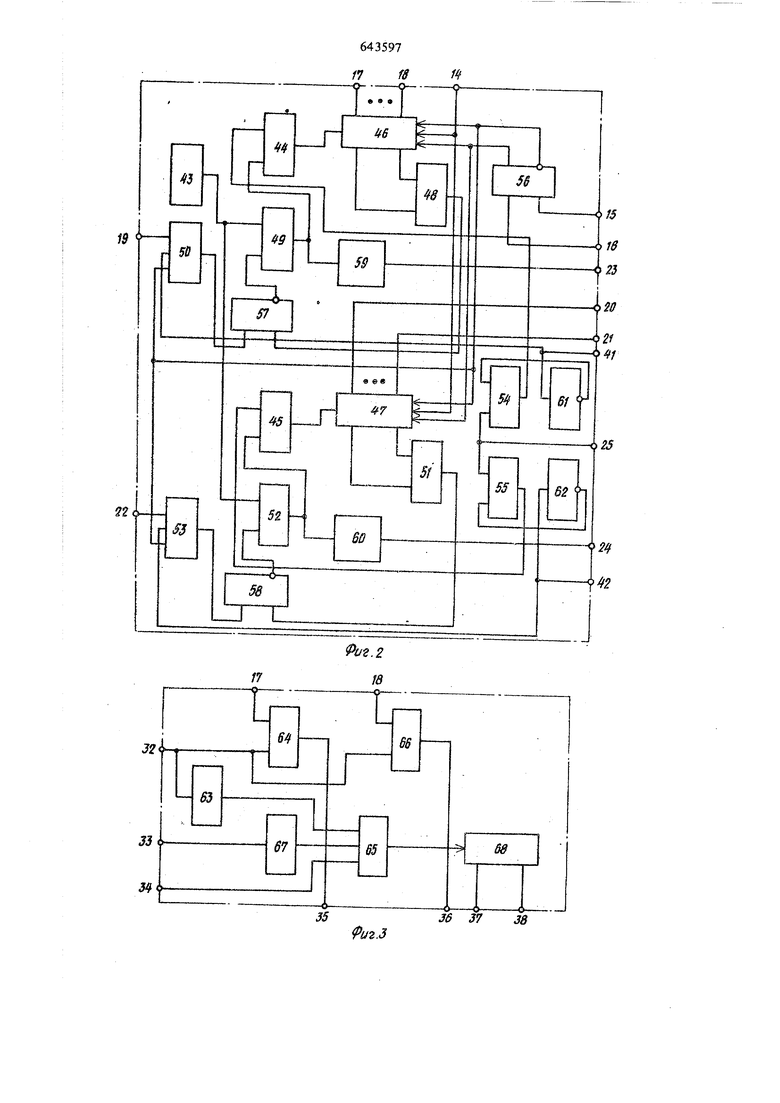
На фиг. приведена структурная схема уст- 55 ройства для контроля работы экскаватора-драглайна; на фиг.. 2 - функциональная схема блока измерения угла поворота шатформы; на 4жг. 3 - функциональная схема блока измершия
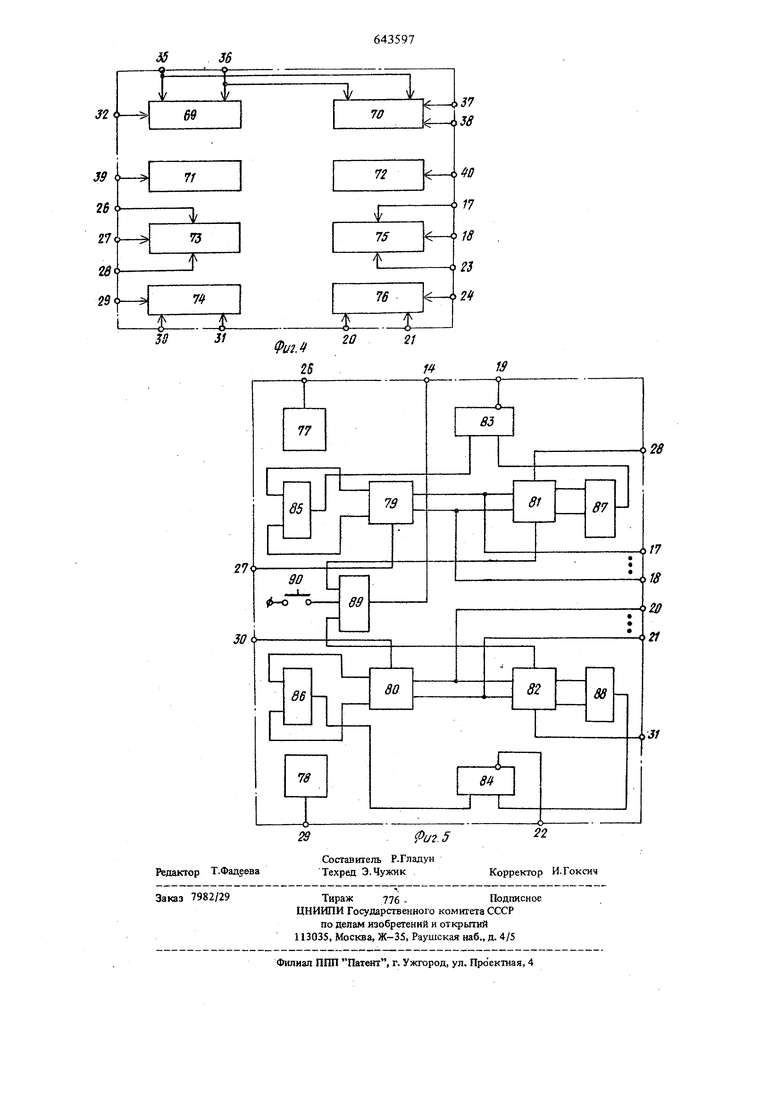
траектории движения экскаватора; на фиг. 4 - функциональная схема выходного блока; на г. 5 - функциональная схема блока задания технологических параметров работы.
Устройство для контроля работь экскаватора-драглайна содержит логический блок 1, блок 2 фиксации области пространства, связанный с датчиками длин тягового 3 и подъемного 4 канатов, блок 5 измерения величины загрузки ковша, связанный с датчиком веса 6, блок 7 измерения угла поворота платформы, связанный с датчиком угла поворота 8, блок 9 измерения траектории движения экскаватора, выходной блок 10 и блок 1 i задания технологических параметров работы. Блок 1 по соответствующим це1шм связан с блоками 2 и 5, по депям 12, 13 - со станцией управления приводагуда экскаватора, по цепи 14 с блоком И, по цепям 15, 16 - с блоком 7, который в свою очередь по цепям 17 - 22 связан с блоком 11, по цепям 17, 18 - с блоком 9, по цепям 7 24 - с блоком 10. Датчик угла поворота 8 по цепи 25 подключен к блоку 7. Блок 10 по цепям 26-31 соединен с блоком 11, по цепи 32 - с блоком L Блок 9 по цепям 32, 33 и 34 связан с блоком 1, по цепям 35 - 38 - с блоком 10. Блок 5 соединен с датчикем 6, блоком 2 и по депям 39 и 40- с блоком 10. Блоки 7 и I соединены цепями 41 и 42.
Блок 7 измерения угла поворота платформы содержит генератор импульсов 43, схемы ИЛИ 44 и 45, реверсивные счетчики 46 и 47, схемы И 48 55, триггеры 56, 57 и 58, узлы 59 и 60 вьписления средних арифметических значений и схемы НЕ 61 и 62. Генератор 43 через схему И 49 подключен к схеме ИЛИ 44 и узлу 59, а через схему И 52 - к схеме ИЛИ 45 и узлу 60. Вторые входы схем ИЛИ 44 и 45 через схемы И 54 и 55 подключены к выходам схем НЕ 61 и 62, а их выходы связаны соответственно с реверсивными счетчиками 46 и 47, выходы которых через схемы И 48 и Si подключены к входам триггеров 57 и 58. Вторые входы триггеров 57 и 58 подключены к выходам соответствующих схем И 50 и 53, одни входы которых подключены к выходу триггера 56, а другие - к входам схем НЕ 61 и 62. Выходы триггеров 57 и 58 подключены соответственно к входам схем И 49 и 52. Выходы триггера 56 подключены к шинам сложения и вычитания реверсивных счетчиков 46 .и 47, соответствующие входы которых по цепи 14 подключень параллельно.
Блок 9 измерения траектории движения зкскаватора содержит времязадерживающий элемент 63, схемы И 64, 65 и 66, пороговый элемент (триггер Шмидта) 67, счетчик 68. Одни входы схем И 64, 65 и вход элемента 63 подключены между собой параллельно. Выходы злементов 63 и 67 через схему И 65 подключены к счетчику 68. Выходной блок-10. содержит показывающее устрюйство 69 дирекционного угла i - го шага, устройство 70 фиксации числа шагов и дирекционных углов шагов (нарастающим итогом), показьтающие устройства: устройство 71 загрузки ковша в J-M цикле экскавации, устройство 72 суммарного веса перемещенной горной массы нарастающим итогом, устройства 73 и 74 заданиых значений технологических параметров работы, устройства 75 н 76 исполненных значений технологических параметров работы. Показьтающие устройства 69 и 70 соответствующими входами соединены параллельно. Блок 11 задания технологических параметров работы содержит задатчики 77 и 78 средних значений углов заполнения и разгрузки ковша, задатчики 79 и 80 минимальных значений углов заполнения и разгрузки, задатчнки 81 и 82 максимальных значений углов заполнения и разгрузки, триггеры 83 и 84, схемы И 85-88, схему ИЛИ 89, замыкающую кнопку 90, Входы задатчиков 79 и 81 соединены параллельно, одни выходы задатчика 79 через схему И 85 подключены к одному входу триггера 83, од1Ш выходы задатчика 81 через схему И 87 подключены к другому входу триггера 83. Аналогично выходы задатчика 80 через схему И 86 связаны с одним входом триггера 84, с другим входом которого соединены одни выходы задатчика 82 через схему И 88. Другие выходы задатчиков 81 и 82 подключещ к входам схемы ИЛИ 89, к третьему входу которой подключена замыкающая кнопка 90. Устройство работает следующим образом. Перед началом работы ориентируют экскаватор по принятому ocHOBHOiVfy направлению и нажатием кнопки 90 приводят счетчики 46 и 47 в нулевое состояние. Затем машинист в соответствии с принятой технологической схемой работы экскаватора и сменным заданием устанавливает посредством задатчиков 77, 79 и 81 среднее значение угла заполнения ковша а, минимальное значение угла заполнения ковща tt, максимал ное значение угла запо.гшения аз, которые отсчитьшаются от принятого основного направления, например, вправо. Аналогично машинист задает среднее значение угла разгрузки ковди ftp, минимальное значение угла разгрузки ар , максималь ное значение угла разгрузки ар используя соот ветствующие задатчики 78, 80 и 82. Кроме того, маишнисту экскаватора при вручении сменного задания даются указания по траектории переме-.. щения экскаватора (число шагов п, угол каждого щага Ош) и координаты точек стояния, выражен{п е в шагах. в процессе экскавации с заданной точки стояния устройство обеспечивает измерение веса горной массы в ковше в каждом цикле экскавашш 6 76 посредством логического блока 1, блоков 2, 5 и связанных с ними датчиков 3, 4 и 6. Блок 11 работает следующим образом. Машинист экскаватора в соответствии с заданием .устанавлршает посредством задатчиков 77, 79 и 81 углы №}, а, Оз, а посредством зада1чиков 78, 80 и 82 - углы Op,., цепям 17, 18 и 20,21 в задатчики 79 -82 с блока 7 поступают действительные значения углов загрузки и разгрузки, выполненных в каждом цикле экскавации «з и ор при выполнении условий 1 макс % оСр Срабатывают элементы И 85 и 86, в результате чего переключаются триггеры 83, 84 и по цепям 19, 22 поступают сигналы в блок 7,обеспечивающий измерение сЕз и Sp. Если аз амакс ар амакс или амин а , то триггеры 83 и 84 не переключаются и иа шинах i 9, 22 сигналы отсутствуют, что исключает учет «3, ctn в подсчете среднеарифметических значейнй аз, йр по всем циклам экскавации в течение смены, т.е. такие циклы классифицируются как неполноценные. Измерение траектории движения экскаватора осуществляются блоком 9, В момент прихода сигнала по цепи 32, характеризующего момент включения механизма шагания, на выходах 35, 36 появляются сигналы, которые характеризуют угол Qmj. Экскаваторщик сравнивает по показывающему устройству 69 устанавливаемое значение «ш с зaдaнньпvf и при их соответствии прекращает поворот платформы, экскаватор передвигается на один щаг. Указанные манипуляции выполняются на каждом шаге перемещения экскаватора. В конце каждого шага схемой И 65 формируется сигнал, который фиксируется в счетчике 68. Выполнение щага перемещения контролируется элементом 63 по длительности включения приводного двигателя и элемеетов 67 но загрузке приводного двигателя. Сигналы по дтнам 35, 36 и 37, 38 поступают в блок 10, где индицируются и фиксируются устройствами 69 и 70. При последовательном выполнении нескольких шагов при одном и том же ащ формированне сигнала иа выходе схемы И55 обеспечивается за счет срабатьтания элемента 63 в конце каждого шага. Блок 7 измерения угла поворота платформы взаимодействует с блоками 9 и 11 следующим образом, В процессе экскавации при noBojioTe платформы в счетчиках 46 и 47 измеряется угол поворота платформы относительно принятого основного направления, В момент завершения операции заполнения ковша логический блок по депй 4 формирует снгкал,, который заш рает cxeivsy И 54, наруша51 снизь по цеяи 25 между даэтикоь/ 8 ; и схемой НЕ б блока 7. В результате этого в счетчике 46 зафиксируется угол загрузки е|, который имел место в данном цякле экскавации. s
Если соблюдаегся услоаке а а-макс -JQ по цепи 19 ROCiynaeT соответстзующий от блока И, а от блока I по цеге-1 16 поступает сигнал, переключавгций граггер 56 в положение, обеспечивающей раситу сястек ка 46 s вычитания. Всяедствйй vpsirrep 57 перяключается и ка ск5Р.й;л И 49 пс шляются импульсы с частотр гек-граюра 43; гготорые через схему ИЛИ 44 поступагш; на 46 и,
59, Орк достий1:ен -ш IS
кроме того., на вход
нулевого еостояюш (Гчепшса 4-6 срабатывает схема И 48 к переключает TpK:rrsp 57 в ясхош-юе : состояние, прекращая тем самым шсг; екйе импульсов с выхода схемы И 49 на указанньш . выше элементы. Таким образен, решено выпол; ненный угол загрузки ковша с Щи соблюдения ; вьпнеприведенных огран яений читьшается ; узлом 59, который вычисляет а-,
АнаПогачно функ1шон грует и шсть : схемы со счетчиком 47 при разгрузка ковша, измеряя действительно прокзЕеденкьш угол разгрузки с, и гфи соблюдении условий oJ : ар дмакс 60 выжсляется значение
угла «р..
, Таким образом, предншаемое ус1 зойство ; гюзволяет контролировать задднную траекггорию перемещения экскаватора, гехядаоппеские параj адетры экскавации («мин 5 , амакс ; ftp) в, сданных точках стоянка, что }.величивает ; эффективность контроля выполкекных объемов работы при бестранспортнс й системе разработки, особенно в слзчае а,шого сратаой перевалки горной массы,
Фор м у л а и 3 о 6 р еiе н и я
. Устройство для контроля paOorbs эг скаватора-драглайна, содержаише датчикн ,цлнн тягового и подьемногс канатов, связанные с блоком фиксации обласги просхрзистаа, который подключай к одному из БХодоЕ блокн измерения величины загрузкм ковита, к другим входа л
гюворота платформы, блока измерения величины нагрузки ковша и логического блока под1слючй1ьт к выходному блоку, отличающееся тем%. что, с целью повышения точности контрюля вьь иояненяых. о(зъемов работ и параметров процесса экскавашЕ, оно снабжено блоками задана технологических параметров работы и измерения траектории щкжепия экскаватора, входы которьк подключенык блоку измерения угла поворота влатформы, а выходы - к выходному блоку, тричем к другим входам блока измерения -фаектории движения экскаватора подключены выходы лопиеского блока.
2.Устройство по пЛ, отличающееся тем, что блок задания технологических параметров работь содер)сит задатчики средних значений углов заполнения и разгрузки ковша, четыре схемы И, схему ИЛИ, замыкающук кнопку и два триггера, входы одного из которых через схег Ь5 И подключены к задагчикам лдашшальных и макси лальр-ых углов заполнения ковша, а входьг второго триггера через схемы И подключены к зйдатчикам минимальных и максшлальных углов разгрузки ковша, причем вы-ходы задатеиков максимальных углов запотгнения и разгрузки ковша поддслЕочены через схему ИЛИ к замыкаюагей кнопке.
3.Устройство по пЛ, отличающееся тем, что блок измерения траектории движения ковша содерхкит три схемы И, пороговый элемеш, времязадерживающий элемент и счетчик, к входу которого через одну из схем И подключены вьгходы порогового элемента и времязадерживающего элемента, вход которого соединен с соответствующими входами двзх других схем И.
Источники шформаиии, прщьчтые во внимамне при эксяертюе
1.Авторское свидетельство № 228305, кл. G07c5/08, 1968.
2.Авторское сввдетельство СССР № 324527, Ю1. GOI 15/00,1970.
3.Авторское свидетельстш СССР №339904, KFI. Е02РЗ/48Л970. которого подю1ючень датчик аеса и логический блок, соединенный с блоком фиксации области Еростракства и блоком измерения утла поворота ияатформы, к входу которого подключен датчик поворота, а выходы блока измерения угла
643597 /7 fff
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для измерения и контроля углов поворота платформы экскаваторадраглайна | 1978 |
|
SU747943A1 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ и УЧЕТА РАБОТЫ ЭКСКАВАТОРА-ДРАГЛАЙНА | 1973 |
|
SU384112A1 |
| Устройство для взвешивания ковшадРАглАйНА | 1979 |
|
SU804775A1 |
| Способ определения положения экска-BATOPA-дРАглАйНА B пРОСТРАНСТВЕ | 1979 |
|
SU800294A1 |
| Способ контроля углов поворота платформы экскаватора-драглайна при выполнении вскрышных бестранспортных работ | 1983 |
|
SU1139803A1 |
| Устройство для измерения работы экскаватора-драглайна | 1976 |
|
SU634232A1 |
| Способ автоматического учета основных показателей работы драглайна | 1983 |
|
SU1170058A1 |
| Способ управления разгрузкой ковша экскаватора-драглайна | 1987 |
|
SU1502723A1 |
| Способ оперативного измерения производительности экскаватора-драглайна | 1983 |
|
SU1084393A1 |
| Способ управления разгрузкой ковша экскаватора-драглайна | 1985 |
|
SU1263761A2 |
19
/7
35
16 25
2S
Г
1
2lf
2
Pu2.2 18
36 37 38
иг.З
