Изобретение относится к измерению параметров работы, выполненной экска- ватором-мехлопатой при .проведении горных работ открытым способом, в частности к контролю и учету параметров работы мехлопаты, используемой на погрузке горной массы и транспортные средства.
Цель изобретения - увеличение точности контроля и учета работы экскаватора-мехлопаты при упрощении реализации способа.
Поставленная цель достигается тем что в процессе экскавации дополни- тельно измеряют ток якорной цепи двигателя механизма напора, угловую скорость вращения вала двигателя механизма подъема ковша, контролируют направление вращения вала двигателя механизма подъема ковша, устанавливают минимальное значение тока якорной цепи двигателя механизма напора и напряжения на дополнительных полюсах механизма подъема, характеризующие процесс заполнения ковша, контролируют направление вращения вала двигателя механизма поворота платформы, при этом операцию черпания определяют как одновремепное выполнение условий fsig п
I .и; н. I э-ni Г
определяют выполнение операции перечерпания путем контроля вьшолнения последовательности операций черпания и опускания ковша, измеряют длительность поворота платформы, определяют загрузку ковша в процессе его переме щения по величине угловой скорости вращения вала двигателя механизма подъема ковша, определают операцию транспортировки груженого ковша посг- ле выполнения операции черпания как одновременное в течение 3-5 с выполнение условий
/Tpoe.if с, I РН; с
контролируют в процессе экскавации выполнение операции открываний днища ковша, а выполнение цикла экскавации определяют путем контроля последовательности реализации .операций черпа ния, транспортировки груженого ковша и открывания днища ковша, где Sign - сигнал, характеризующий подъем ковша экскаватора;
i
,
0
5 0 5 0
5
0 j
Г10в-1
lihcT установленный и фактический токи якорной цепи двигателя механизма напора;
Unp ,и„„; - установленное и фак- тическое напряжение на дополнительных полюсах двигателя механизма подъема ковша; - длительность вращения платформы после выполнения операции черпания;
Pj)4; - масса нетто в груженом
ковше; С(, устанавливаемые константы.
При этом величину загрузки ковша определяют в процессе его транспортировки к месту разгрузки после вьтол- нения операции черпания и поворота платформы влево или вправо в течение 3-5 с путем сглаживания текущего значения скорости вращения вала привода механизма подъема ковша, последующего интегрирования в течение 2-3 с выходной величины, получаемой после сглаживания и нахождения на указанном интервале среднего значения интегрируемой величины, пропорциональной загрузке ковша.
Кроме того, в процессе экскавации подсчитывают суммарное число произведенных черпаний и перечерпаний на i-й монент времени, подсчитьгаают суммарное число произведенных циклов экскавации на тот же моме.нт времени и по отношению суммарного числа произведенных циклов экскавации к суммарному числу черпаний и перечерпаний судят о подготовленности горной массы к экскавации.
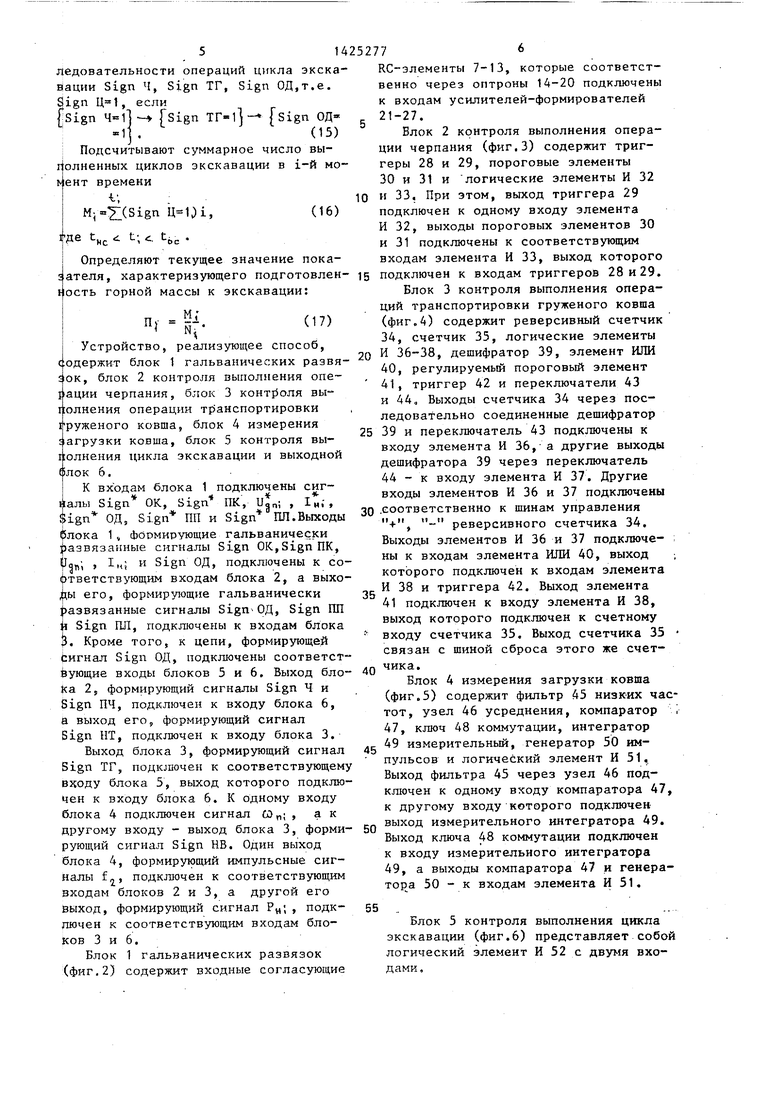
На фиг,1 приведена структурная схема устройства, реализующего способ контроля и учета работы экскаватора- мехлопаты; на фиг.2-7 - структурные схемы функциональных блоков устройства.
Способ осуществляют следующим образом.
В процессе экскавации измеряют величину напряжения на дополнительных полюсах двигателя механизма подъема ковша, ток якорной цепи двигателя механизма напора 1,; и ско- . рость вращения вала двигателя механизма подъема ковша «ц; затем контролируют направление вращения двига- теля механизма подъема ковша, причем
10
31425277
сигнал Sign получают при направ,- лении вращения двигателя,, обеспечивающем подъем ковша, а сигнал Sign ОК 1 - при направлении вращения двигателя, .обеспечивающем опускание ковша. Устанавливают минимальные значения тока якорной цепи двигателя механизма напора 1ц ufcV и напряжения на дополнительных полюсах двигателя механизма подъема и„„п , характеризующие процесс заполнения ковша.
В процессе экскавации контролирут направление вращения двигателя механизма поворота платформы:Sign ГШ 1 - при направлении вращения двигателя, обеспечивающем поворот платормы вправо, и Sign - при напавлении вращения двигателя, обеспеивающем поворот платформы влево. Затем определяют выполнение операции черпания
15
Sign4-1, если sign ПК 1ц; i .Uan (jCT
где 1нусг (,6)1нном; (0,3-0,6)идг,„ом;
(1)
п по
. гд
25.ша тр
20
HOM
установленный и номинальный токи якорной цепи двигателя механизма напора; установленное и номинальное (при номинальной нагрузке) напряжения на дополнительных полюсах двигателя механизма подъема ковша.
Выполнение операции перёчерпьшани определяют путем контроля выполнения последовательности операций, . Sign. , если fslgn:4« l|- rsignOK« 1. . - ,- (2) Затем подсчитьтают суммарное число выполненных черпаний и перечерпаний в процессе экскавации в 1-й момент времени
iiti ч
Nj-lL(Sign ); +2:(Sign , (3)
где
t; tt,,,ct. г
текущее время;
toe время начала и окончания
смены,
причем i-й момент времени на интервале смены определяется в зависимост от технологической потребности.
Проводят измерение длительности поворота платформы
ПОб.А.
(4)
Sign
Sign ,
(6)
10
- .
15
.
я
длительность периодов правых и левых поворотов платформы;
п1, п2 - число периодов правых и левых поворотов платформы при перемещении груженого ковша. Определяют начало периода транспортировки груженого ковша
Sign НТ-1, если fsign , . sign
. где Sign , если / С , (8) С,- 3-5 с.
Определяют величину загрузки ков- 25.ша в каждом цикле экскавации в период транспортировки груженого ковша
г
t ,.dt
20
(9)
30
РИГ
К - Р,
ПК
, де t, t,j,j/Sign НВ-1,,
Sign , если /Sign ,
о)
(10). (11)
ПК К
ОД
t, t,+(2-3) с;
масса порожнего ковша; коэффициент пропорциональности;
40 Sign - при отсутствии сигнала, обеспечивающего открывание днища ковша. Определяют выполнение операции транспортировки груженого ковша. 45 Sign , если после выполнения операции черпания (Sign ) выполняются условия
ГРн;ьС21(13)
1|Т„с«.;| С,
,
(14)
и
50 где С, (0,3 - 0,6) , а Р„ом - номинальная загрузка ковша; Cj 3 - 5 с.
В процессе экскавации контролируют выполнение операции открывания днища
55 ковша: Sign - при наличии сигнала, обеспечивающего открывание днища ковша .
Выполнение цикла экскавации определяют путем контроля выполнения последовательности операций цикла экскавации Sign Ч, Sign ТГ, Sign ОД,т.е. Sign , если
(jsign sign sign ОД ; lj .(15)
i Подсчитывают суммарное число выполненных циклов экскавации в i-й момент времени
i;
M,(Sign ,(16)
де t t; с. t .
1 Определяют текущее значение показателя, характеризующего подготовлен- юсть горной массы к экскавации:
П)
М,
(17)
Устройство, реализующее способ, с;одержит блок 1 гальванических развя- IOK, блок 2 контроля выполнения one- 11ации черпания, блок 3 конт15оля вы гюлнения операции транспортировки груженого ковша, блок 4 измерения лагруэки ковша, блок 5 контроля выполнения цикла экскавации и выходной
{)ЛОК 6.
к входам блока 1 подключены сиг- йалы Sign OK, Sign ПК, Ugn , it,;, Sign ОД, Sign ПП и Sign ПП.Выходы
лока 1, формирующие гальванически развязанные сигналы Sign OK,Sign ПК, , ,; и Sign ОД, подключены к со- (1)тветствующим входам блока 2, а выхо- ;ы его, формирующие гальванически азвязанные сигналы Sign-ОД, Sign Ш1 k Sign ПЛ, подключены к входам блока р. Кроме того, к цепи, формирующей Ыгнал Sign ОД, подключены соответствующие входы блоков 5 и 6. Выход блока 2, формирующий сигналы Sign Ч и Sign ПЧ, подключен к входу блока 6, а выход его, формирующий сигнал Sign НТ, подключен к входу блока 3.
Выход блока 3, формирующий сигнал Sign ТГ, подюпочен к соответствующему входу блока 5, выход которого подключен к входу блока 6. К одному входу блока 4 подключен сигнал fOr,; , а к другому входу - выход блока 3, формирующий сигнал Sign НВ. Один выход блока 4, формирующий импульсные сигналы fj, подключен к соответствующим аходам блоков 2 и 3, а другой его Выход, формирующий сигнал «; , подключен к соответствующим входам блоков 3 и 6.
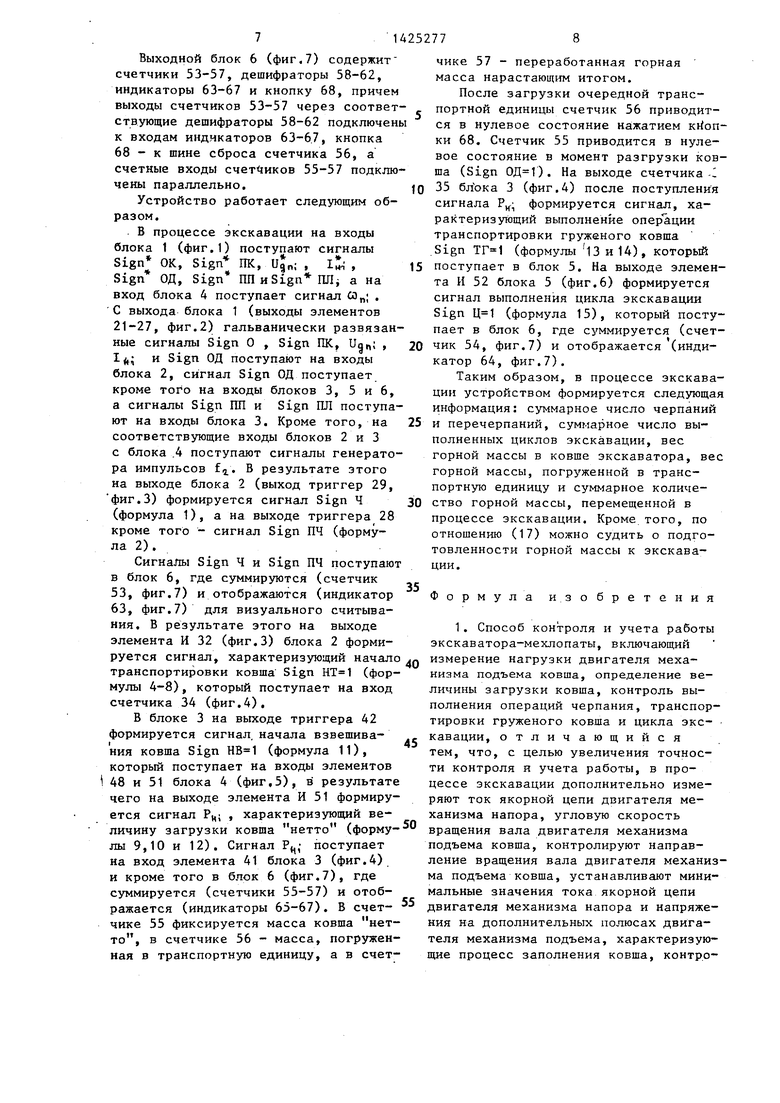
Блок 1 гальванических развязок (фиг.2) содержит входные согласующие
5
0
5
0
5
0
5
0
5
КС-элементы 7-13, которые соответственно через оптроны 14-20 подключены к входам усилителей-формирователей 21-27.
Блок 2 контроля выполнения операции черпания (фиг.З) содержит триггеры 28 и 29, пороговые элементы 30 и 31 и логические элементы И 32 и 33, При этом, выход триггера 29 подключен к одному входу элемента И 32, выходы пороговых элементов 30 и 31 подключены к соответствующим входам элемента И 33, выход которого подключен к входам триггеров 28 и 29.
Блок 3 контроля выполнения операций транспортировки груженого ковша (фиг.4) содержит реверсивный счетчик 34, счетчик 35, логические элементы И 36-38, дешифратор 39, элемент ИЛИ
40,регулируемый пороговый элемент
41,триггер 42 и переключатели 43
и 44, Выходы счетчика 34 через последовательно соединенные дешифратор 39 и переключатель 43 подключены к входу элемента И 36, а другие выходы дешифратора 39 через переключатель 44 - к входу элемента И 37. Другие входы элементов И 36 и 37 подключены .соответственно к шинам управления +, - реверсивного счетчика 34. Выходы элементов И 36 и 37 подключены к входам элемента ИЛИ 40, выход которого подключен к входам элемента И 38 и триггера 42. Выход элемента 41 подключен к входу элемента И 38, выход которого подключен к счетному входу счетчика 35. Выход счетчика 35 связан с шиной сброса этого же счетчика.
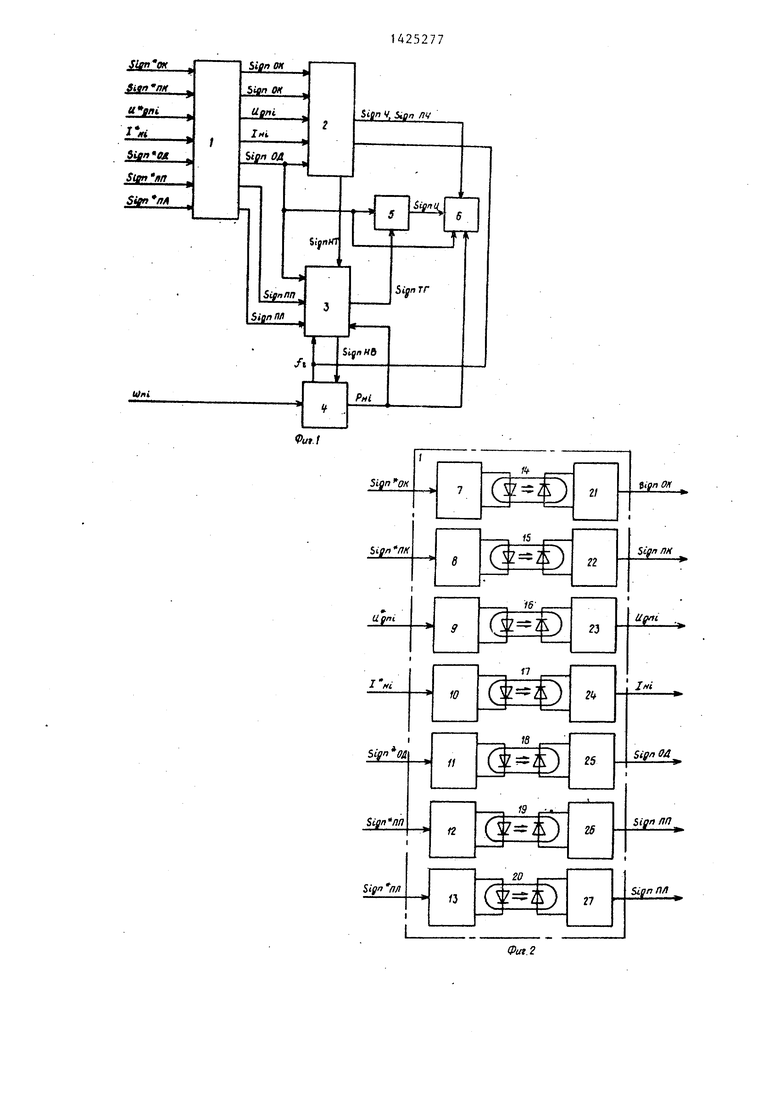
Блок 4 измерения загрузки ковша (фиг.5) содержит фильтр 45 низких частот, узел 46 усреднения, компаратор i 47, ключ 48 коммутации, интегратор 49 измерительный, генератор 50 импульсов и логический элемент И 51, Выход фильтра 45 через узел 46 подключен к одному входу компаратора 47, к другому входу которого подключен выход измерительного интегратора 49. Выход ключа 48 коммутации подключен к входу измерительного интегратора 49, а выходы компаратора 47 и генератора 50 - к входам элемента И 51.
Блок 5 контроля выполнения цикла экскавации (фиг.6) представляет собой логический элемент И 52 с двумя входами.
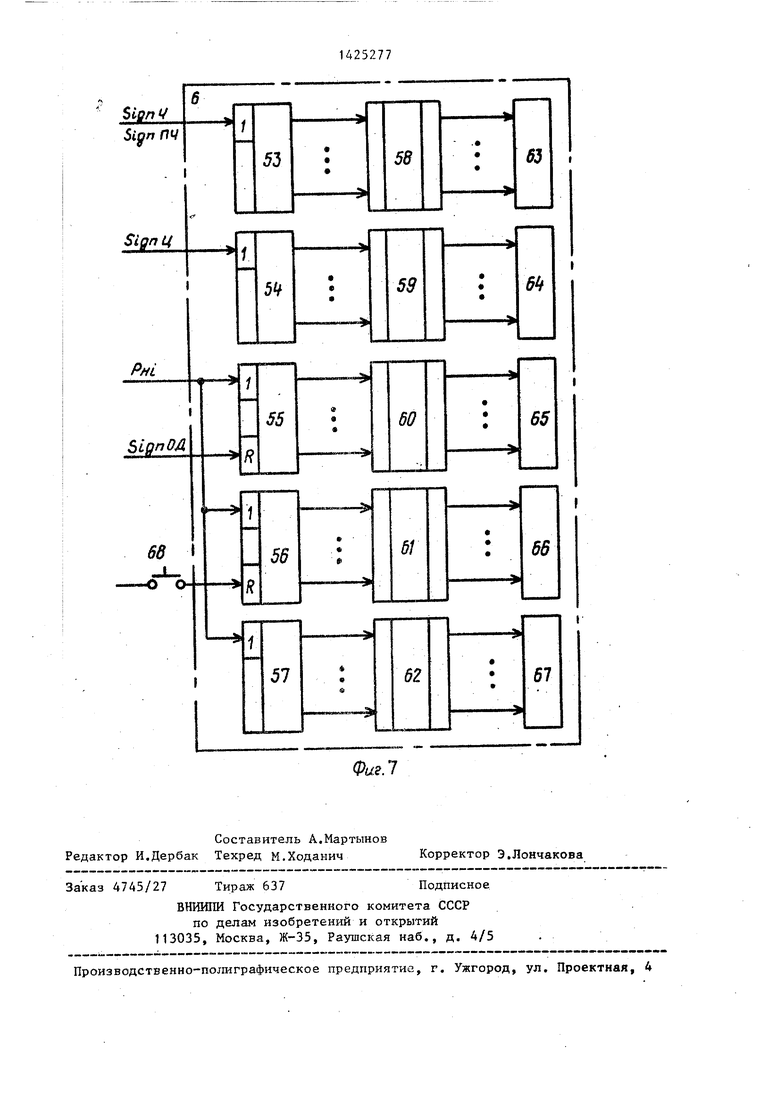
Выходной блок 6 (фиг.7) содержит счетчики 53-57, дешифраторы 58-62, индикаторы 63-67 и кнопку 68, причем выходы счетчиков 53-57 через соответствующие дешифраторы 58-62 подключены к входам индикаторов 63-6.7, кнопка 68 - к шине сброса счетчика 56, а счетные входы счет 1иков 55-57 подключены параллельно.
Устройство работает следующим образом,
В процессе экскавации на входы блока 1 (фиг,1) поступают сигналы Sign OK, Sign ПК, ujn; , i; , Sign ОД, Sign nnHSign raij a на вход блока 4 поступает сигнал С0„; , С выхода блока 1 (выходы элементов 21-27, фиг.2) гальванически развязанные сигналы Sign О , Sign ПК, Ugi,; , и Sign ОД поступают на входы блока 2, сигнал Sign ОД поступает кроме того на входы блоков 3, 5 и 6, а сигналы Sign ПП и Sign ПЛ поступают на входы блока 3, Кроме того, на соответствующие входы блоков 2 и 3 с блока ,4 поступают сигналы генератора импульсов f, В результате этого на выходе блока 2 (выход триггер 29, фиг.З) формируется сигнал Sign Ч (формула 1), а на выходе триггера 28 кроме того - сигнал Sign ПЧ (формула 2) ,.
Сигналы Sign Ч и Sign ПЧ поступают в блок 6, где суммируются (счетчик 53, фиг,7) и отображаются (индикатор 63, фиг,7) для визуального считывания, В результате этого на выходе элемента И 32 (фиг.З) блока 2 форми
0
5
0
чике 57 - переработанная горная масса нарастающим итогом.
После загрузки очередной транспортной единицы счетчик 56 приводится в нулевое состояние нажатием ки 68. Счетчик 55 приводится в нулевое состояние в момент разгрузки ковша (Sign ). На выходе счетчика-. 35 блЪка 3 (фиг,4) после поступления сигнала формируется сигнал, характеризующий выполнение опер ации транспортировки груженого ковша .Sign (формулы 13 и 14), который поступает в блок 5, На выходе элемента И 52 блока 5 (фиг,6) формируется сигнал выполнения цикла экскавации Sign (формула 15), который поступает в блок б, где суммируется (счетчик 54, фиг,7) и отображается (индикатор 64, фиг,7),
Таким образом, в процессе экскавации устройством формируется следующая информация: суммарное число черпаний 5 и перечерпаний, суммарное число выполненных циклов экскавации, вес горной массы в ковше экскаватора, вес горной массы, погруженной в транспортную единицу и суммарное количество горной массы, перемещенной в процессе экскавации. Кроме того, по отношению (17) можно судить о подготовленности горной массы к экскавации.
0
35
Формула изобретения
1, Способ контроля и учета работы экскаватора-мехлопаты, включающий

| название | год | авторы | номер документа |
|---|---|---|---|
| Способ автоматического учета основных показателей работы драглайна | 1983 |
|
SU1170058A1 |
| Способ автоматического учета основных показателей работы драглайна | 1986 |
|
SU1421830A1 |
| Способ контроля процесса заполнения ковша-экскаватора-драглайна | 1985 |
|
SU1298311A1 |
| Способ оценки качества управления экскаватором-драглайном | 1985 |
|
SU1344868A1 |
| Способ оперативного измерения производительности экскаватора-драглайна | 1987 |
|
SU1585462A1 |
| Способ управления разгрузкой ковша экскаватора-драглайна | 1987 |
|
SU1502723A1 |
| Способ контроля работы экскаватора-драглайна | 1983 |
|
SU1129398A1 |
| Способ оперативного контроля использования экскаватора-драглайна | 1986 |
|
SU1328451A1 |
| Способ управления разгрузкой ковша экскаватора-драглайна | 1984 |
|
SU1199868A1 |
| Способ управления разгрузкой ковша экскаватора-драглайна | 1985 |
|
SU1263761A2 |

Изобретение касается измерения параметров работы экскаватора-мехло- паты. Цель изобретения - повьшенке точности контроля и учета работы экскаватора при упрощении реализации. Измеряют нагрузку двигателя подъема, определяют величины загрузки ковша (Р. ) в процессе его перемещения по значению угловой скорости двигателя подъема и длительность вращения платформы (ТПРВ;). Измеряют ток двигателя напора (), напряжение на дополнительных полюсах двигателя подъема (Ufl J, I ). Устанавливают миним. значения тока напора (1. цр ) и напряжения на дополнительных полюсах двигателя механизма подъема (ив.)- Операция черпания определяется как одновременное выполнение условий 1ц.,- н.чст UjnjS Ud.(,.5 при сигнале, характеризующем подъем ковша . Операция перечерпывания определяется как последовательность выполнения операций черпания и опускания ковша. Операция транспортировки груженого ковша определяется как одновременное в течение 3-5 с выполнение условий ,-/5- Р„;Ь Сд, где С и С - задаваемые константы. Выполнение цикла экскавации определяется контролем последовательности операций черпания, транспортировки груженого ковша и открывания днища ковша. 2 з.п. ф-лы, 7 ил. (Л 1 N5 СЛ ISD 
руется сигнал, характеризующий начало Q измерение нагрузки двигателя меха- транспортировки ковша Sign (формулы 4-8), который поступает на вход счетчика 34 (фиг,4),
В блоке 3 на вьпсоде триггера 42 формируется сигнал, начала взвешивания ковша Sign (формула 11), который поступает на входы элементов 48 и 51 блока 4 (фиг,5), в результате чего на выходе элемента И 51 формиру45
низма подъема ковша, определение ве личины загрузки ковша, контроль выполнения операций черпания, транспо тировки груженого ковша и цикла экс кавации, отличающийся тем, что, с целью увеличения точнос ти контроля и учета работы, в процессе экскавации дополнительно изме ряют ток якорной цепи двигателя механизма напора, угловую скорость вращения вала двигателя механизма подъема ковша, контролируют направление вращения вала двигателя механ ма подъема ковша, устанавливают мин мальные значения тока якорной цепи двигателя механизма напора и напряж ния на дополнительных полюсах двига теля механизма подъема, характеризу щие процесс заполнения ковша, контр
ется сигнал Рц; , характеризующий величину загрузки ковша нетто (формулы 9,10 и 12), Сигнал Р,,,- поступает на вход элемента 41 блока 3 (фиг,4) и кроме того в блок 6 (фиг.7), где суммируется (счетчики 55-57) и отображается (индикаторы 65-67), В счетчике 55 фиксируется масса ковша нетто, в счетчике 56 - масса, погруженная в транспортную единицу, а в счетQ измерение нагрузки двигателя меха-
5
низма подъема ковша, определение величины загрузки ковша, контроль выполнения операций черпания, транспортировки груженого ковша и цикла экс- кавации, отличающийся тем, что, с целью увеличения точности контроля и учета работы, в процессе экскавации дополнительно измеряют ток якорной цепи двигателя механизма напора, угловую скорость вращения вала двигателя механизма подъема ковша, контролируют направление вращения вала двигателя механизма подъема ковша, устанавливают минимальные значения тока якорной цепи двигателя механизма напора и напряжения на дополнительных полюсах двигателя механизма подъема, характеризующие процесс заполнения ковша, контропируют направление вращения вала двигателя механизма поворота платфор |мы, при этом операцию черпания определяют как йдновременное выполнение условий
I Sign
Ii
и
И.,
ст
Определяют выполнение операции пере- I черпания путем контроля выполнения Последовательности операций черпания к опускания ковша, измеряют длитель- ность поворота платформы, определяют I загрузку ковша в процессе его переме |Щения по величине угловой скорости Iвращения вала двигателя механизма подъема ковша, определяют операцию транспортировки груженого ковша посл выполнения операции черпания как од- |новременное в течение 3-5 с выполне- 1ние условий 1. /Тпов; I С,|
Р,.,й Ci ),
контролируют в процессе экскавации :выполнение операции открывания днища I ковша, а выполнение цикла экскавации определяют путем контроля последова- Стельности реализации операций черпа- |ния, транспортировки груженого ковша |и открьгеания днища ковша, iгде Sign - сигнал, характеризующий подъем ковша экс- 5 экскавации на тот же момент времени
HI
каватора;
установленный и фактический токи якоря двигателя механизма напора;
10
15 20 25
30 ЗП
fioe.i
-M.I
(t
10
установленное и фактическое напряжение на дополнительных полюсах двигателя механизма подъема ковша; длительность вращения платформы после выполнения операций черпания;
масса груженого ковша нетто ;
С - устанавливаемые константы.
2,Способ по п.1, отличающий с я тем, что определяют величину загрузки ковша в процессе транспортировки из забоя к месту разгрузки после выполнения операций черпания и поворота платформы в течение 3-5 с путем интегрирования в течение 2-3 с
.скорости вращения вала привода механизма подъема ковша и нахождения на указанном интервале среднего значения интегрируемой величины, пропорциональной загрузке ковша.
на i-й момент времени, подсчитьшают суммарное число произведенных циклов
И по отношению суммарного числа произведенных циклов экскавации к суммарному числу черпаний и перечерпаний судят о подготовленности горной массы к экскавации.
Slfn OK
Фиг.Ъ
SLonTT
Siffn ОЛ .
52
Фиг. 6
Фиг. 5
ЩпЦ
| Авторское сввдетельство СССР № 975925, кл | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Способ автоматического учета основных показателей работы драглайна | 1983 |
|
SU1170058A1 |
| кл | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Видоизменение прибора для получения стереоскопических впечатлений от двух изображений различного масштаба | 1919 |
|
SU54A1 |
