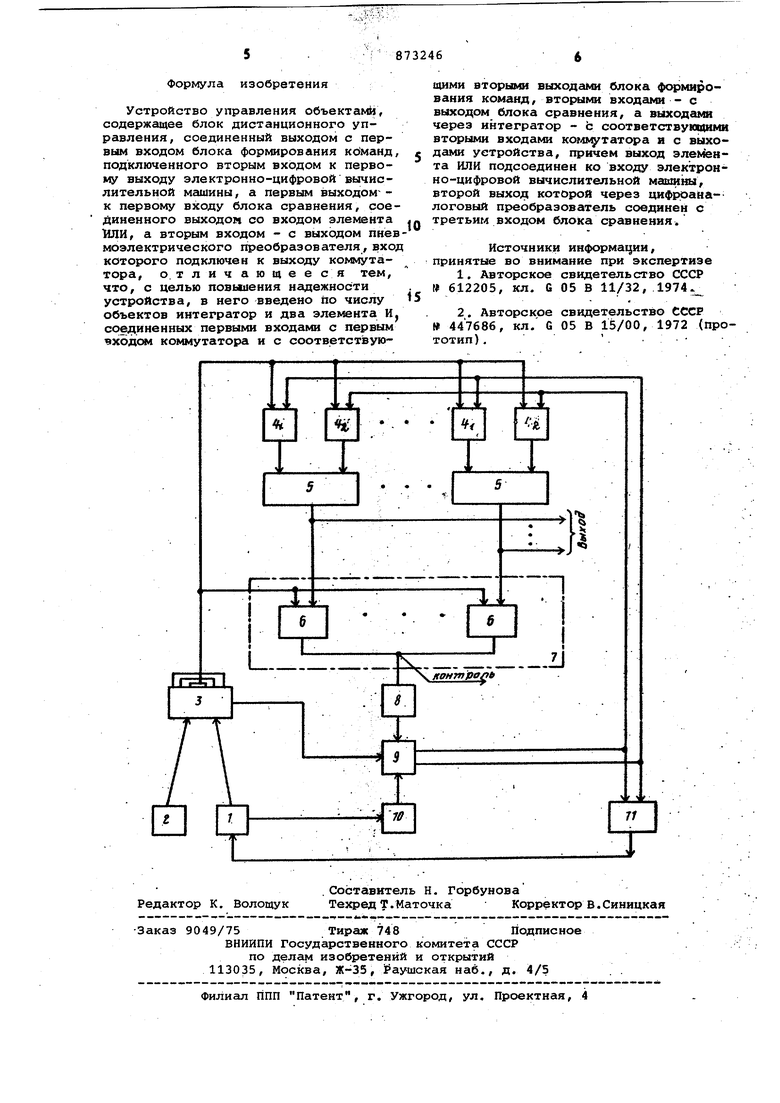
Изобретение относится к средствам автоматизации производственных про цессов и может быть применено при ав томатизации производств в хшляческой нефтехимической и других отраслях пр мышленности , а также в сельском хозя стве совместно с ЭВМ. Известно устройство для многоканального управления - многоканальный регулятор, содержащее последовательно соединенные входной злектрйческий коммутатор, блок сравнения с задатчи ком уставок, выключатель, выходной электрический коммутатор, пневматический аналоговый регулятор с задатчиком, электропневматические переключатели, элементы памяти и электро пневматический аналоговый преобразователь, связанный с выходом входного электрического коммутатора и входом пневматического аналогового регулятора, выход которого через элементы памяти соединен с соплами электропне матических переключателей, обмотки которых соединены с выходом выходного электрического коммутатора, в котором один регулятор попеременно с помощью группы синхронно работающих коммутаторов подключается к различным каналам управления, отрабатывая рассогласование между входным сигналом канала и задатчика, установленного на данном канале J. Недостатком устройства является малое быстродействие, связанное с невозможностью управления сразу несколькими каналами. Наиболее близким техническим решением к данному изобретению является пневматическое устройство для многоканального управления, содержащее цифровой регистратор, блок дистанционного управления, выходы которого через первую и вторую cxevti ИЛИ подключены к групповому приводу, выход которого через И муфт сцепления подключен к первым входам И задатчиков, вторые входы которых соединены с блоком ручного управления, а выход с коммутатором, блок формирования команд, третью схему ИЛИ, блок выбора задатчика и последовательно соединенные пневмоэлектронный преобразователь, аналого-цифровой преобразователь, третий элемент памяти, блок сравнения, один выход которого подключен к входу блока формирования команд, а два других - к первой и второй схемам ИЛИ, первый и второй элементы памяти, выходы которых через третью схему ИЛИ подключены к блоку выбора эадатчика, выходы которого соединены с коммутатором и с входом муфт сцепления, причем вход первого элемента памяти подключен к входному каналу, вход второго элемента памяти соединен с выходом блока дистанционного управления, который подключен к блоку.формирования команд, соединенному с аналого-цифровым прербраэователем и входным каналом, который через дополнительно введенный четвертый элемент .памяти соединен с блоком сравнения и цифровым регистратором. Данное устройство поз воляет получить на каждом выходе ана логовый пневматический сигнал в зависимости от времени включения дискретного сигнала управления, поданно о или с ЭВМ, или с блока ручного управления С 3Недостатком устройства является малая надежность из-за наличия механических приводов, сложная конструк ция. Цель изобретения.- повышение надежност и устройства. Поставленная цель достигается тем, что в устройство управления объ ектами, содержащее блок дистанционного управления, соединенный выходом с первым входом блока формирова ния команд, подключенного вторым входом к первому выходу электронноцифровой вычислительной мгииины, а первым выходом - к первому входу бло ка С1 авнения, соединенного выходом со входом элемента ИЛИ, а вторым входом - с выходом пневмоэлектричес кого преобразователя, вход крторого подключен к выходу коммутатора, вве дено по числу объектов интегратор и два элемента И, соединенных первыми входами с первым входом коммутатора и с соответствующими вторыми выходами блока формирования команд, вторыми входами - с выходом блока сравнения, а выходами через интегра тор - с соответствукяцими вторыми входс1ми коммутатора и с выходами устройства, причем выход элемента ИЛИ подсоединен ко входу электронно цифровой вычислительной машины, второй выход которой через цифроань логовый преобразователь соединен с ,третьим входом блока сравнения. На чертеже дана блок-схема устро ства. Устройство содержит ЭВМ (электро но-цифровую вычислительную машину) i блок 2 дистанционного управления, блок 3 формирдвания команд, элемент И 4. , 4yt интеграторы 5, реле б ком мутатор 7, пневмоэлектрический прео разователь 8, блок сравнения 9, циф роанёшоговый преобразователь 10, эл мент ИЛИ 11. Устройство работает следуклцим об разом. .Возможны два режима работы, выбираемые блоком 3 формирования команд ручное и автоматическое. В режиме ручное ЭВМ отключена и управление осуществляется от блока 2 дистанционного управления. На блоке 2 набирается адрес интегратора 5, который необходимо включить и знак интегрирования больше или меньше. Адрес поступает на соответствующий элемент И на первый (адресный вход, а знак - на блок сравнения 9. На од- . ном из выходов блока 9 появляется 1, на Д7РУГОМ О. Совпадение 1 адреса и выхода блока 9 на входе в элемент И приводит к включению соответствующего интегратора 5, выходной сигнал которого начинает изменяться в нужном направлении. Контроль за изменением выходного сигнала осуществляется, визуально на выходе коммутатора, реле 6 которого открылось, пропустив на выход сигнал соответствующего интегратора 5. I В режиме автоматическое блок 2 отключен, а ЭВМ 1 подключена к устройству. На блок сравнения 9 с блока 3 сигнал не поступает и нгшичие 1 на выходе.блока 9 зависит только от соо ношения величины сигналов с преобразователей 8 и 10. ЕЬли сигналы эти отключаются на величину меньше допустимой, то на обоих выходах нули, если один из сигналов больше, то на соответствующем выходе появляется 1. ЭВМ вырабатывает код адреса, поступающий на адресный вход соответствующего элемента И 4. и 42 и реле б, и код, который в преобразователе 10 преобразуется в аналоговый электрический сигнал. Пневматический сигнал от интегратора 5 через реле б, включенный кодом от ЭВМ, в преобразователе 8 преобразуется в электрический сигнал. Сигналы с обоих преобразователей 8 и 10 сравниваются в блоке сравнения 9, на выходе которого появляются соответствующие сигналы. Если сигналы с преобразователей 8 и 10 разнятся на величину больше заданной, то на одном из выходов элемента 9 будет 1. и интегратор 5 включается таким образом, чтобы рассогласование сигналов с преобразова.телей 8 и 10 уменьшилось. Когда рассогласование станет меньше заданной величины, то на обоих выходах блока 9 появятся нули, и элементы И-не пропустят сигнал кода на интегратор. Выходные сигналы блока .9 через элемент ИЛИ 11 поступают на ЭВМ. По этим сигналам ЭВМ определяет, момент переключения на другой канал. Данное устройство является более надежным, так как оно имеет сравнительно простую конструкцию и не имеет механических приврДов.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство многоканального управления | 1979 |
|
SU974337A1 |
| Устройство для испытаний датчиков давления | 1983 |
|
SU1129624A1 |
| УСТРОЙСТВО КОНТРОЛЯ ПАРАМЕТРОВ | 2007 |
|
RU2331098C1 |
| Пневматическое устройство для многоканального управления | 1972 |
|
SU447686A1 |
| Аналого-цифровая вычислительная система и аналоговая вычислительная машина (ее варианты) | 1983 |
|
SU1259300A1 |
| Многоканальный регулятор | 1980 |
|
SU1032425A1 |
| Устройство для ввода информации | 1980 |
|
SU920812A1 |
| Пневматическое устройство централизованного управления | 1983 |
|
SU1136113A1 |
| Устройство для ввода информации | 1986 |
|
SU1386986A1 |
| Устройство контроля электромагнитных параметров гибкого магнитного диска | 1988 |
|
SU1578627A1 |
