(54) УСТРОЙСТВО УПРАВЛЕНИЯ РЕЗКОЙ ГЛИНЯНОГО БРУСА
| название | год | авторы | номер документа |
|---|---|---|---|
| Автомат для отрезки мерного глиняного бруса | 1982 |
|
SU1041301A1 |
| Автомат для резки кирпича | 1984 |
|
SU1186494A1 |
| Автомат для резки глиняного бруса | 1980 |
|
SU961974A1 |
| Автомат для резки глиняного бруса | 1979 |
|
SU1044224A3 |
| Автомат для резки кирпича | 1977 |
|
SU715337A1 |
| Система управления автоматом-садчиком кирпича | 1989 |
|
SU1648780A1 |
| Автоматическое устройство подачи мерных брусьев от прессов к резательным автоматам | 1977 |
|
SU685501A1 |
| АВТОМАТ ДЛЯ РЕЗКИ ПЛАСТИЧНОГО БРУСА | 2015 |
|
RU2581434C1 |
| ЛИНИЯ ДЛЯ ПРОИЗВОДСТВА СТРОИТЕЛЬНОГО КИРПИЧА | 1991 |
|
RU2010706C1 |
| Автомат для разрезания глиняного бруса и передачи сырца на съемник | 1949 |
|
SU90113A1 |
I
Изобретение относится к оборудованию для производства .строительных материалов и может быть использовано при созданий и модернизации автоматов для резки,глиняного бруса.
Известно устройство управления автоматов для резки кирпича с механизмами отрезки бруса и резки его на кирпичи, содержаш,ее логический элемент И, датчик поступления бруса, блок управления и датчик крайнего положения 1.
Однако это устройство не обеспечивает управление режущей рамкой механизма отрезки бруса.
Наиболее близким к предлагаемому по технической сушности является устройство управления резкой глиняного бруса, содержащее каретку, механизм отрезки с приводом, который соединен с со6тветств5 ющими пускателями, и датчик положения каретки 2..
Однако в известном устройстве для подвода проводов к датчику между рамой и кареткой подвешивается гибкий кабель. Наличие подвижного датчика и гибкого токопровода усложняет конструкцию и снижа ет надежность работы.
Цель изобретения - повышение надежности работы.
Эта цель достигается тем, что устройство управления резкой- глиняного бруса, содержащее каретку, механизм отрезкис приводом, который соединен с соответствующими пускателями, и датчик положения каретки, снабжено делителем частоты, двумя инверторами и двумя логическими элементами И, причем датчик полохсения каретки подключен ко входу делителя частоты и ко fO входу первого инвертора, выход которого соединен с одним из входов элементов И, выходы которых подключены к соответствующим пускателям, выход делителя частоты подключен ко входу второго инвертора и к другому входу первого элемента И, а выход инвертора соедин ен с другим входом второго элемента И.
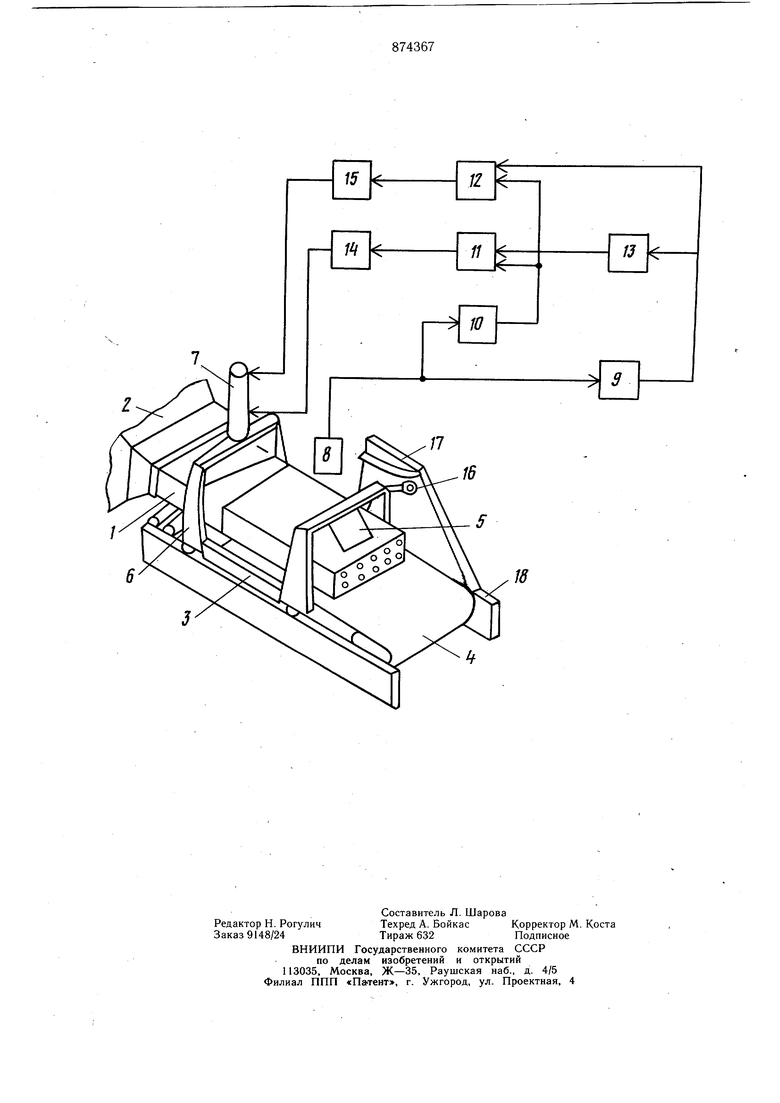
На чертеже схематично представлено устройство управления автоматом.
Глиняный брус 1 формуется прессом 2. Автомат для резки кирпича выполнен в ви20де каретки 3, расположенной над транспортером 4. Каретка снабжена заслонкой 5 и механизмом отрезки бруса 6 с приводом 7. У каретки расположен датчик 8 положения каретки, подключенный к делителю частоты 9 и через инвертор 10 - к входам двух элементов И 11 и 12. Вход элемента 11 подключен к выходу делителя 9 через второй инвертор 13, а вход схемы 12 - непосредственно. Выход элемента 11 подключен к пускателю 14, управляющему движением привода 7 отрезки бруса вверх, а выход элемента 12 подключен к пускателю 15, управляющему движением привода 8 вниз. Заслонка 5 снабжена роликом 16, выполненным с возможностью взаимодействия с копиром 17, расположенным на раме 18. Предлагаемое устройство работает следующим образом. Непрерывно формуемый прессом 2 глиняный брус 1 перемещается по транспортеру 4 и упирается в заслонку 5. Каретка 3 трогается с места. На выходе датчика 8 появляется сигнал, который через инвертор 10 подается на входы обоих элементов И 11 и 12 и на вход делителя частоты 9. С выхода делителя частоты сигнал подается на втором входе элемента 12. Включается пускатель 15, и привод 7 механизма отрезки бруса 6, обеспечивающий ход последнего вниз и отрезку мерного бруса. При дальнейшем перемещении каретки ролик 16 воздействует на копир 17. Заслонка 5 откидывается, и отрезанный брус убирается транспортером 4. Каретка 6 под воздействием противовеса или отдельного привода (на чертеже не показан) возвращается в исходное положение. Глиняный брус, формуемый прессом, вновь воздействует на заслонку 5, и каретка трогается с места. Как и в первый раз, сигналы с датчика 8 подаются на элементы 11 и 12 и делитель 9. Так как делитель частоты пропускает сигналы через раз, на его выходе и втором входе сигнала не будет, но сигнал появится на выходе инвертора 13 и втором входе элемента 11. Включается пускатель 14 и привод 7 механизма отрезки бруса 6, обеспечивающий ход последнего вверх и отрезку мерного бруса. Подобным образом следующий брус будет отрезаться ходом вниз. Далее цикл повторяется. Предлагаемое устройство обеспечивает управление автоматом без применения датчиков положения механизма отрезки и гибкого токопровода каретки, что позволяет упростить конструкцию автомата и повысить надежность его работы. Формула изобретения Устройство управления резкой глиняного бруса, содержащее каретку, механизм отрезки с приводом, который соединен с соответствующими пускателями, и датчик положения каретки, отличающееся тем, что, с целью повыщения надежности работы, оно снабжено делителем частоты, двумя инверторами и двумя логическими элементами И, причем датчик положения каретки подключен ко входу делителя частоты и к входу первого инвертора, выход которого соединен с одним из входов элементов И, выходы которых подключены к соответствующим пускателям, выход делителя частоты подключен ко входу второго инвертора и к другому входу первого элемента И, а выход инвертора соединен с другим входом второго элемента И. Источники информации, принятые во внимание при экспертизе 1.Авторское свидетельство СССР № 715337, кл. В 28 В 11/14, 1977. 2.Шукуров Э. Д. и др. Автомат СМК-19 резки и укладки кирпича.-«Строительные и дорожные мащины. 1975, № 11, с. 20- 22 (прототип).
