(54) АВТОМАТ ДЛЯ РЕЗКИ КИРПИЧА
| название | год | авторы | номер документа |
|---|---|---|---|
| Автомат для резки кирпича | 1984 |
|
SU1186494A1 |
| Автомат для резки глиняного бруса | 1980 |
|
SU961974A1 |
| АВТОМАТ-РЕЗЧИК КЕРАМИЧЕСКОГО БРУСА | 1990 |
|
RU2069621C1 |
| Устройство управления резкой глиняного бруса | 1980 |
|
SU874367A1 |
| Линия для производства строительного кирпича | 1990 |
|
SU1768398A1 |
| Устройство для резки и укладки кирпича | 1990 |
|
SU1791134A1 |
| Устройство для резки бруса из пластичного материала | 1990 |
|
SU1787785A1 |
| Установка для резки и укладки кирпича-сырца на консольные вагонетки | 1983 |
|
SU1144888A1 |
| ЛИНИЯ ДЛЯ ПРОИЗВОДСТВА СТРОИТЕЛЬНОГО КИРПИЧА | 1991 |
|
RU2010706C1 |
| Автомат для групповой резки кирпича | 1984 |
|
SU1219374A1 |
I , . / :
-Изобретение относюгся к оборудЬ1ваНй0 Для производства строительных материалов и может, быть использовано при дакйи и модернизации автоматов для резки глиняного бруса.
Известен автомат для резки бруса из пластичного материала, состоящий из формующего пресса, транспортера с приводом, мекан-цзма струнной резки i Недостатком этого автомата является высокая шЛенсивность pa6oTfei механизмов, так как резка производится по одному брусу. Точность резки бруса на этих автоматах невелика.
1 авестен автомат для резки кирпи- чв .2 , содержащий пресс формовки, механизм отрезки мерного бруса, механизм многострунной резки, включающий премный транспортер с пргшодом, релу- щую рамку и привод толкателя, блок управления приводами приемного, травс«ч портера и толкателя, датчики поступления бруса и крайнего положения трлка« тела.
Недостатком, этого автомата является то, что для остановки трвпспортера и выдачи команды режущему устройс:тву используется датчик о подходе бруса к упору, усталовленЕый в конце транс . портера. большой производител ности скорость транспортера должна быть достаточно большой, брус, удаляясь в упор, сминается и его геометрические размеры изменяются, из-за чего гфайнне кир пичи получаются меньшего размера и бракуюХся.
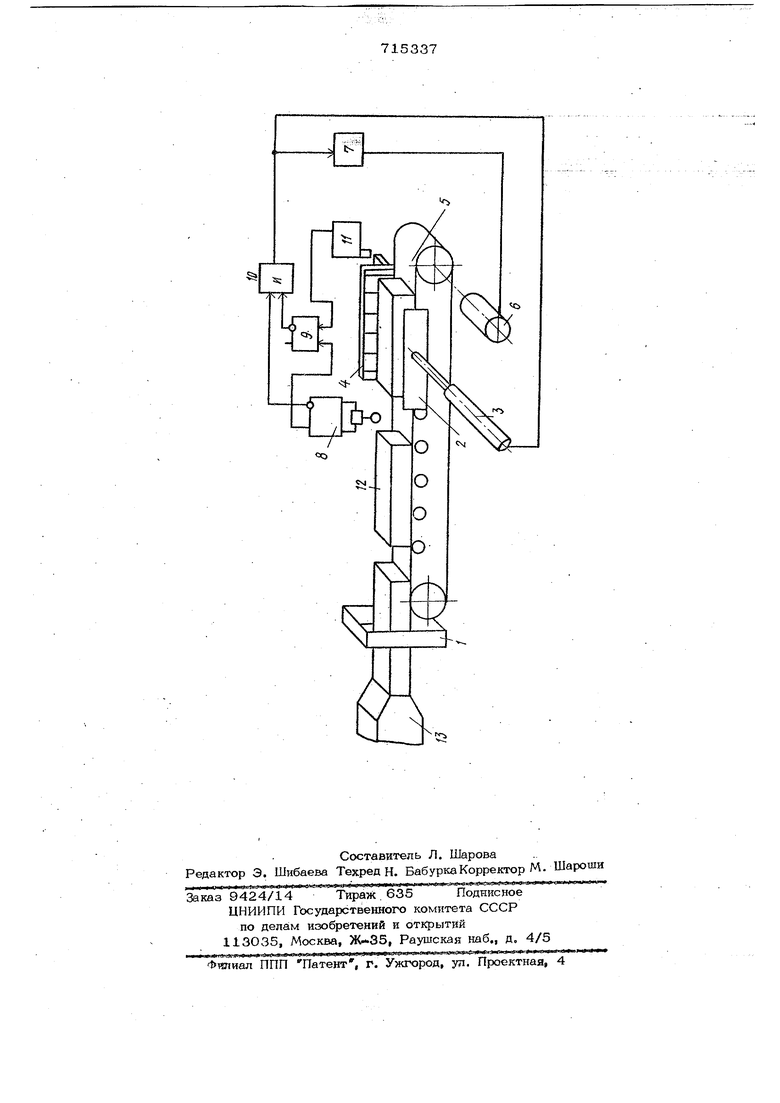
Цель изобретения - повышение точности резки. Псютавленная кель достигается тем, что в автомате для резки
5 кирпича, содержащем пресс формовки, механизм отрезки мерного бруса, механйзм многострунной резки, включающий тфиемный транспортер с приводом, режущую рамку и привод толкателя, &IOK управления приводами приемного транспортера и толкателя, датчики поступления бруса к крайнего положения толкателя, снабжен триггером и логическим элемен37том И, причем перед режущей рамкой установлен датчик поступления бруса, один из вь содов которого соединен с одним входом триггера, другой вход которого подключен к датчику крайнего положения толкателя, другой выход датчика поступления бруса соединен с одним из входов логического элемента И, другой вход которого соединен с выходом триггера, а выход логического элемента И подключен к приводу толкателя и входу блока управления, выход которого сое динен с приводом приемного транспорте- ра. . Автомат для резки кирпича представлен на чертеже и содержит механизм 1 отрезки мерного бруса и механизм муогострушюй резки, выполненный в виде толкателя 2 с приводом 3 И режущей рамки 4, приемный транспортер 5 с приводом 6, блок управления 7, датчик роступленюг бруса .8, триггер 9, логический элемент И 1О, датчик 11 крайнего положения толкателя , мерный брус 12и прессформовки 13, Автомат работает следующим образом Птиняныйбрус 12 формуется прессом 13. От непрерывно формуемой прессом 13глиняной ленты механизмом 1 отрезается мерный брус 12, который приемным транспортером 5 передается к механизму многострунной резки. Перед толкателем 2 брус воздействуе на датчик 8, сигнал которого переключает триггер. Ка входах схемы 10 ранее был нулевой сигнал триггера и единичны сигнал с инверсного выхода датчика 8, в соответствии с чем на выходе ее был нулевой сигнал. При воздействии на датчик 8 нулевым становится стггнал с roiверсного выхода этого датчика, а единичным - сигнал с триггера, в результате чего на выходе схемы И продолжает оставаться нулевой сигнал. После прохода бруса за датчик 8 (положение бруса показано на чертеже пунктиром) на обоих входах схемы И появляются 74 единиШые сигналы. Выходной сигнал с этой схемы подается в блок управления 7, обеспечивающий снижение скорос ти и отключение привода 6 приемного транспортера 5, и на вход привода 3 толкателя 2. Мерный брус проталкивается толкателем 2 сквозь режущую рамку 4, разрезается при этом на отдельные кирпичи . В конце хода толкатель 2 во действует на Датчик 11, сигнал которого переключает триггер. Толкатель возвращается в исходное положение. Далее цикл повторяется. Формула изобретения, - Автомат для резки кирпича, содержащий пресс формовки, механизм отрезки мерного бруса, механизм многострунной резки, включающий приемный транспортер с приводом, режушую рамкуи привод толкателя, блок управления приводами приемного транспортера и толкателя, датчики поступления бруса и крайнего положения толкателя, отличающийся тем, что, с целью повышения точности резки, автомат снабжен и логическим элементом И , причем перед режущей рамкой установлен датчик поступления бруса, ОДИН из выходов которого соединен с одним входом триггера, дру гой вход которого подключен к датчику крайнего положения толкателя, другой выход датчика поступления бруса сое- Д1шен с одним из входов логического элемента И, другой вход которого соедшшн с выходом триггера, а выход логического элемента И подключен к приводу толкателя и входу блока управления, выход которого соединен с приВодо м пр иемно1Ю транспортера. Истошики ин4юрмации, принятые во внимание при экспертизе 1.Авторское свидетельство СССР № 485002, кл. В 28 В 11/14, 1975. 2,Шукуров Э. Д. и др. Автомат СМК № - 169 резки и укладки кирпича, Строительные и дорожные машдаы,. № 11, 1975, с. 20-22.
