I
Изобретение относится к горному делу, конкретно к системам автоматического управления перемещением механизированных xperiefi агрегатов.
Известен агрегат для выемки наклонных и крутых платов, включающий механизированную крепь, имеющую две базовые балки, расположенные соответственно у кровли и почвы пласта, с направляющими, по которым перемещаются выемочные машины ПНедостатком этоГо агрегата является отсутствие устройств, обеспечивающих автоматическое управление перемещением баз и синхронизацию величины хода их перемещения, следствием чего являются поломки баз и элементов, связывающих их с секциями крепи.
Наиболее близким по технической сущности и достигаемому результату к предлагаемому является устройство управления механизированной крепью агрегата, включающее гидродомкраты передвижением базы и механизм управления перемещением базы, содержащий гибкую нить, натянутую вдоль базы и закрепленную с возможностью перемещения относительно базы в плоскости .пласта, перпендикулярно базе, датчики перемещекия, установленные с возможностью взаимодействия с гибкой нитью и выключателями гидродомкратов 2.
Известное устройство обеспечивает прямолинейность базы и порционированное ее перемещение.
Однако недостатком его является невозможность обеспечения при наличии в крепи двух баз, перемещаемых поочередно, разных их перемещений, что снижает надежности работы агрегата.
Цель изобретения - повышение надежности работы агрегата при наличии в нем двух баз.
Поставленная цель достигается тем, что устройство снабжено дополнительными механизмом управления перемещением базы4 15 при этом оба механизма управления перемещением установлены раздельно на каждой базе, а их гибкие нити связаны с противоположными базами посредством механизмов; имеющих одну степень свободы.
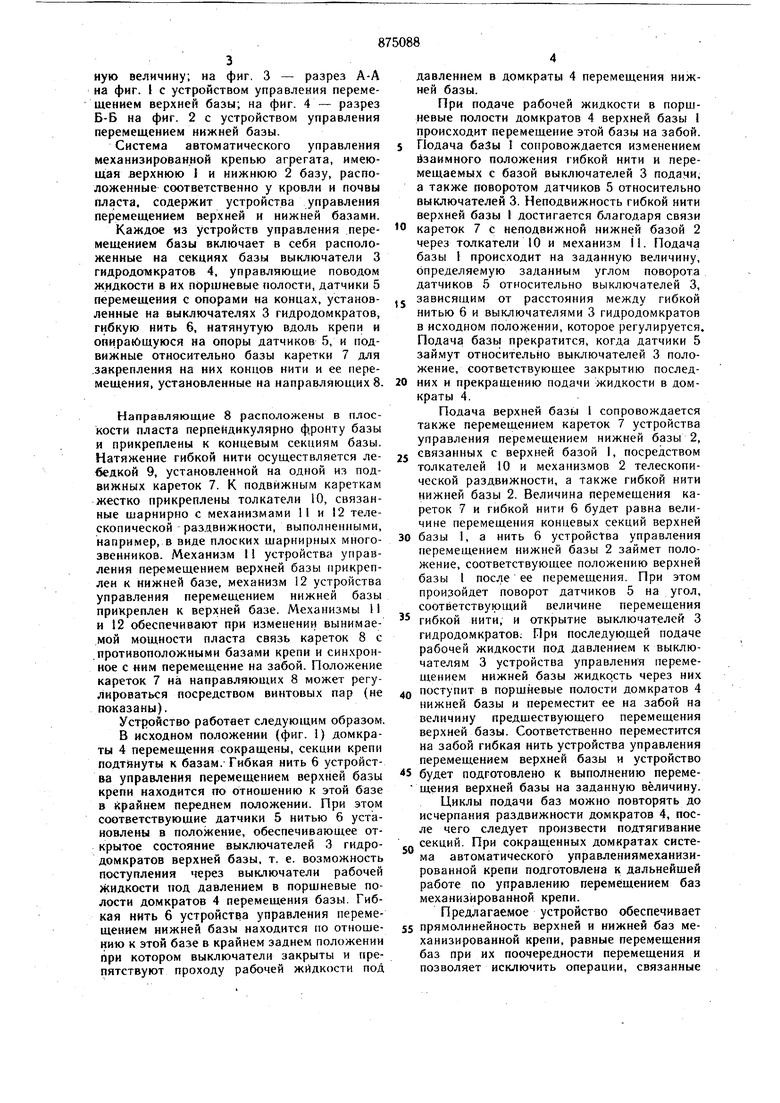
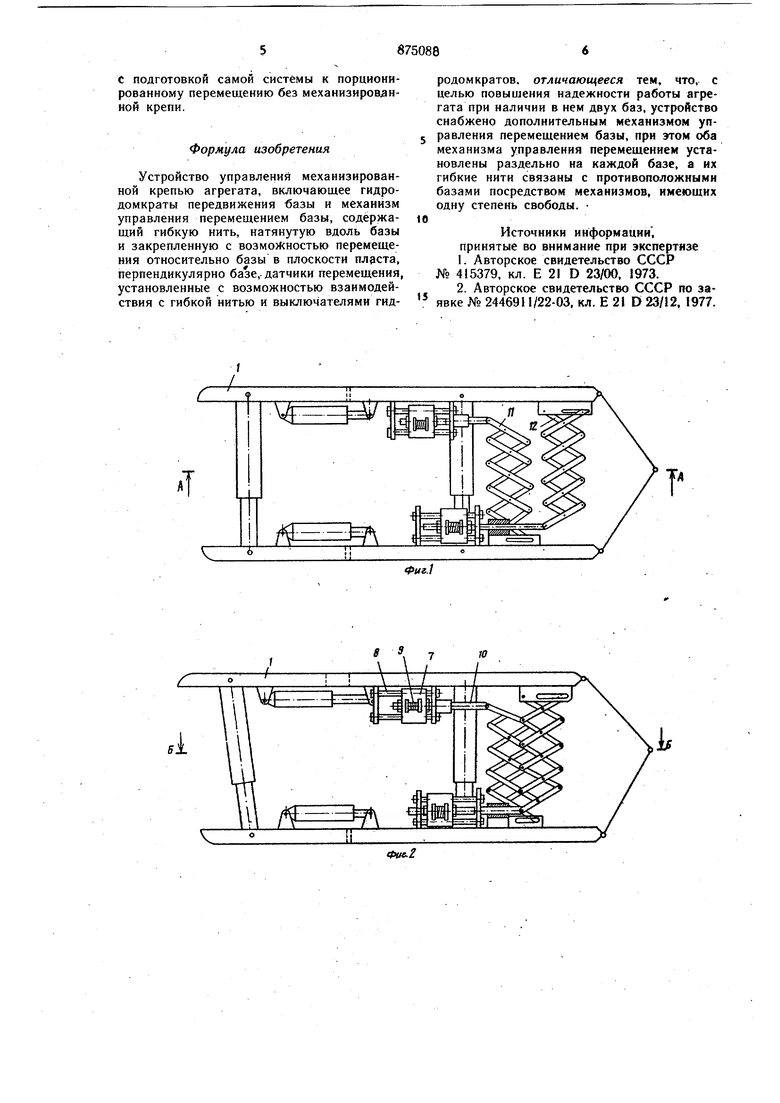
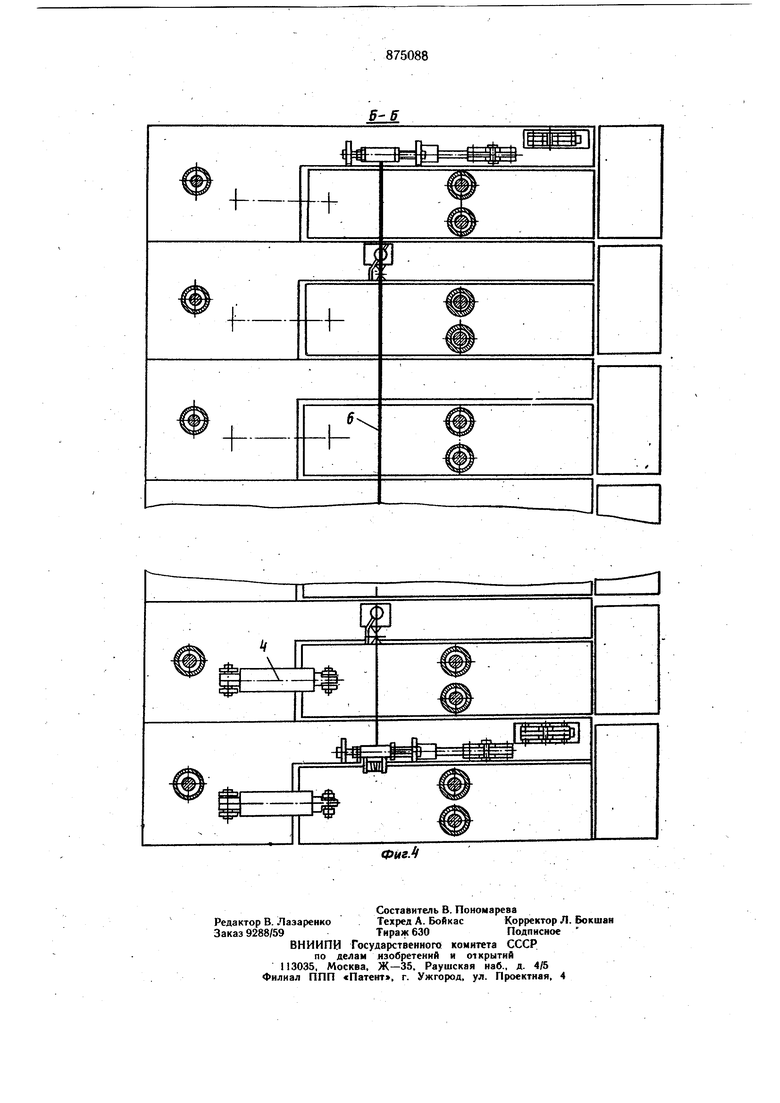
На фиг. I показана механизированная 20 крепь в исходном положении с установленной на нем системой автоматического управления, вид сбоку; на фиг. 2 - то же, после перемещения верхней базы крепи на заданную величину; на фиг. 3 - разрез А-А на фнг. I с устройством управления перемещением верхней базы; на фиг. 4 - разрез Б-Б на фиг. 2 с устройством управления перемещением нижней базы.
Система автоматического управления механизированной крепью агрегата, имеющая верхнюю I и нижнюю 2 базу, расположенные соответственно у кровли и почвы пласта, содержит устройства управления перемещением верхней и нижней базами.
Каждое яз устройств управления перемещением базы включает в себя расположенные на секциях базы выключатели 3 гидродогмкратов 4, управляющие поводом жидкости в их порщневые полости, датчики 5 перемещения с опорами на концах, установленные на выключателях 3 гидродомкратов, гибкую нить 6, натянутую вдоль крепи и опирающуюся на опоры датчиков 5, и подвижные относительно базы каретки 7 для .закрепления на них концов нити и ее перемещения, установленные на направляющих 8.
Направляющие 8 расположены в плоскости пласта перпендикулярно фронту базы и прикреплены к концевым секциям базы. Натяжение гибкой нити осуществляется лебедкой 9, установленной на одной из подвижных кареток 7. К подвижным кареткам жестко прикреплены толкатели 10, связанные шарнирно с механизмами 11 и 12 телескопической раз.авижности, выполненными, например, в виде плоских щарнирных многозвенников. Механизм II устройства управления перемещением верхней базы прикреплен к нижней базе, механизм 12 устройства управления перемещением нижней базы прикреплен к верхней базе. Механизмы 11 и 12 обеспечивают при изменении вынимаемой мощности пласта связь кареток 8 с противоположными базами крепи и синхронное с «им перемещение на забой. Положение кареток 7 на направляющих 8 может регулироваться посредством винтовых пар (не показаны).
Устройство работает следующим образом.
В исходном положении (фиг. 1) домкраты 4 перемещения сокращены, секции крепи подтянуты к базам. Гибкая нить 6 устройства управления перемещением верхней базы крепи находится по отнощению к этой базе в крайнем переднем положении. При этом соответствующие датчики 5 нитью 6 установлены в положение, обеспечивающее открытое состояние выключателей 3 гидродомкратов верхней базы, т. е. возможность поступления через выключатели рабочей жидкости под давлением в порщневые полости домкратов 4 перемещения базы. Гибкая нить 6 устройства управления перемещением нижней базы находится по отношению к этой базе в крайнем заднем положении При котором выключатели закрыты и препятствуют проходу рабочей жидкости поД
давлением в домкраты 4 перемещения нижней базы.
При подаче рабочей жидкости в порщневые полости домкратов 4 верхней базы 1 происходит перемещение этой базы на забой.
Подача базы I сопровождается изменением йзаимного положения гибкой нити и перемещаемых с базой выключателей 3 подачи, а также поворотом датчиков 5 относительно выключателей 3. Неподвижность гибкой нити верхней базы I достигается благодаря связи
кареток 7 с неподвижной нижней базой 2 через толкатели 10 и механизм 11. Подача базы 1 происходит на заданную величину, определяемую заданным углом поворота датчиков 5 относительно выключателей 3,
зависящим от расстояния между гибкой нитью б и выключателями 3 гидродомкратов в исходном положении, которое регулируется. Подача базь прекратится, когда датчики 5 займут относительно выключателей 3 положение, соответствующее закрытию последних и прекращению подачи -жидкости в домкраты 4.
Подача верхней базы 1 сопровождается также перемещением кареток 7 устройства управления перемещением нижней базы 2,
связанных с верхней базой 1, посредством толкателей 10 и механизмов 2 телескопической раздвижности, а также гибкой нити нижней базы 2. Величина перемещения кареток 7 и гибкой нити 6 будет равна величине перемещения концевых секций верхней
базы 1, а нить 6 устройства управления перемещением нижней базы 2 займет положение, соответствующее положению верхней базы 1 после ее перемещения. При этом произойдет поворот датчиков 5 на угол, соответствующий величине перемещения
гибкой нити, и открытие выключателей 3 гидродомкратов; При последую.щей подаче рабочей жидкости под давлением к выключателям 3 устройства управления перемещением нижней базы жидкость через них
поступит в порщневые полости домкратов 4 нижней базы и переместит ее на забой на величину предществующего перемещения верхней базы. Соответственно переместится на забой гибкая нить устройства управления перемещением верхней базы и устройство
будет подготовлено к выполнению перемещения верхней базы на заданную величину. Циклы подачи баз можно повторять до исчерпания раздвижности домкратов 4, после чего следует произвести подтягивание секций. При сокращенных домкратах система автоматического управлениямеханизированной крепи подготовлена к дальнейщей работе по управлению перемещением баз механизированной крепи.
Предлагаемое устройство обеспечивает
прямолинейность верхней и нижней баз механизированной крепи, равные перемещения баз при их поочередности перемещения и позволяет исключить операции, связанные
с подготовкой самой системы к порционированному перемещению без механизированной крепи.
Формула изобретения
Устройство управления механизированной крепью агрегата, включающее гидродомкраты передвижения базы и механизм управления перемещением базы, содержащий гибкую нить, натянутую вдоль базы и закрепленную с возможностью перемещения относительно базы в плоскости пласта, перпендикулярно базе, датчики перемещения, установленные с возможностью взаимодействия с гибкой нитью и выключателями гидродомкратов, отличающееся тем, что, с целью повышения надежности работы агрегата при наличии в нем двух баз, устройство снабжено дополнительным механизмом управления перемещением базы, при этом оба механизма управления перемещением установлены раздельно на каждой базе, а их гибкие нити связаны с противоположными базами посредством механизмов, имеющих одну степень свободы.
10
Источники информации, принятые во внимание при экспертизе
1.Авторское свидетельство СССР № 415379, кл. Е 21 D 23/00, 1973.
2.Авторское свидетельство СССР по заt5явке № 2446911/22-03, кл. Е 21 D 23/12, 1977.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления перемещением базы механизированной крепи | 1977 |
|
SU726347A1 |
| Устройство для управления перемещением базы механизированной крепи | 1978 |
|
SU787673A1 |
| АГРЕГАТ ФРОНТАЛЬНЫЙ ДОЛИНСКОГО АФД, ИСПОЛНИТЕЛЬНЫЙ ОРГАН (ВАРИАНТЫ), ЦЕПЬ КОЛЬЦЕВАЯ, СТАВ АГРЕГАТА, МЕХАНИЗМ РЕГУЛИРОВАНИЯ ПО ГИПСОМЕТРИИ, СЕКЦИИ КРЕПИ, ПЕРЕКРЫТИЕ, КРЕПЬ ВАНДРУТНАЯ, ТРАНСПОРТНОЕ ОБОРУДОВАНИЕ, ПЕРЕГРУЖАТЕЛЬ (ВАРИАНТЫ), ГИДРОДВИГАТЕЛЬ ДЛЯ ЭМУЛЬСИИ, СРЕДСТВО УПРАВЛЕНИЯ, СРЕДСТВО КОНТРОЛЯ ГРАНИЦЫ "УГОЛЬ-ПОРОДА", СПОСОБЫ МОНТАЖА И САМОМОНТАЖА | 1996 |
|
RU2114996C1 |
| АГРЕГАТ СТРУГОДОСТАВОЧНЫЙ, СТАВ СТРУГОДОСТАВОЧНОГО АГРЕГАТА, МЕХАНИЗМ ПЕРЕМЕЩЕНИЯ НАПРАВЛЯЮЩИХ, АГРЕГАТНАЯ КРЕПЬ, ГИДРАВЛИЧЕСКАЯ СИСТЕМА УПРАВЛЕНИЯ, УСТРОЙСТВО ДЛЯ ПОДХВАТА ПРИЗАБОЙНОЙ КРОВЛИ, ОПОРНАЯ БАЗА КОЛЬЦЕВОГО СТРУГА | 2000 |
|
RU2182668C2 |
| Устройство для управления перемещением базы механизированной крепи | 1978 |
|
SU727857A1 |
| Агрегат для выемки угля из крутых пластов | 1981 |
|
SU972134A1 |
| Крепь монтажного слоя | 1983 |
|
SU1138510A1 |
| УСТРОЙСТВО ДЛЯ ПОДДЕРЖАНИЯ ПРЯМОЛИНЕЙНОСТИ БАЗЫ КРЕПИ | 1991 |
|
RU2024765C1 |
| Агрегат для выемки угля | 1981 |
|
SU1101556A1 |
| МЕХАНИЗИРОВАННАЯ КРЕПЬ ДЛЯ КРУТЫХ ПЛАСТОВ | 2007 |
|
RU2357083C1 |
/:
,i 3: t
+
7
У(.1
1
-f-+
-f
--+
Фяг.З
