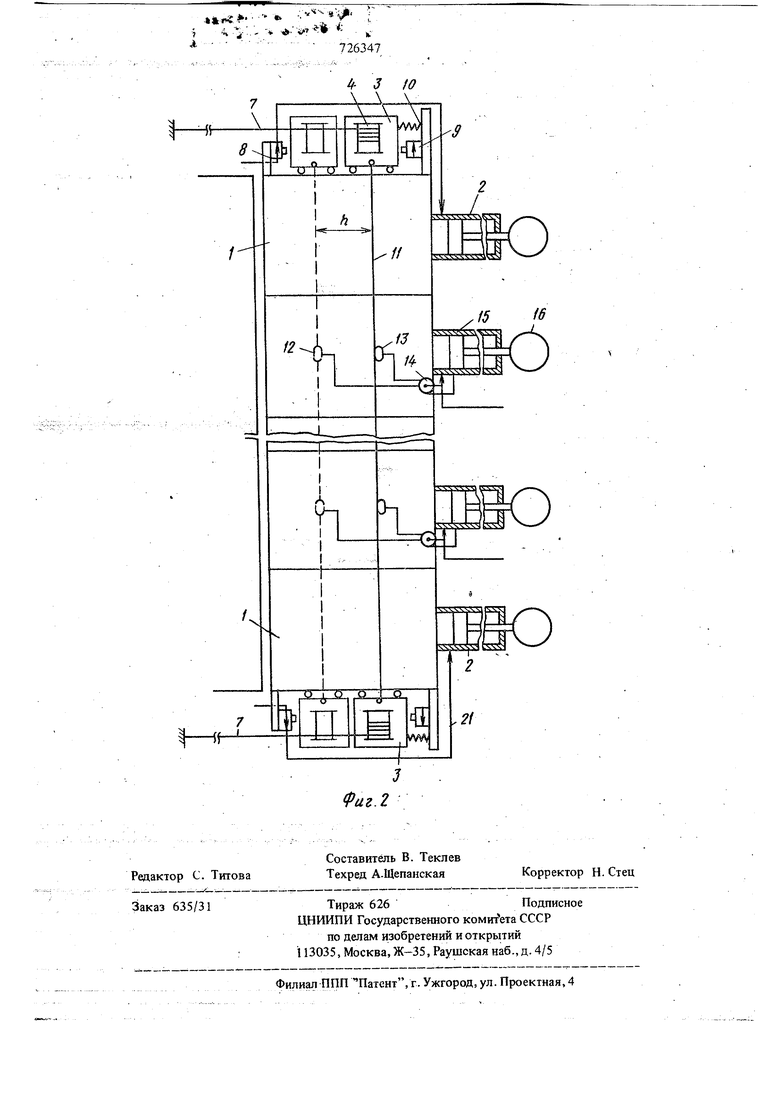
Изобретение относится к разработке угля, очистными комплексами и агрегатами, а имен но к автоматическому управлению перемещением базы механизированной крепи агрегата в плоскости пласта с применением задающей гибкой нити, натянутой вдоль базы. Известно устройство автоматического обеспечения прямолинейности стругового агрегата, содержащее задающую гибкую нить, натянутую вдоль базы и закрепленную на ее концах на автономных передвижчиках.электрические датчики и электрогидроклапаны 1. Устройство работает следующим образом. Гибкая нить при помощи автономных передвижчиков перемещается на забой и, взаимодействуя с датчиками, производит открывание электрогидроклапанов, подключенных к гид{юдомкратам передвижки базы. После этого секщ1и базы начинают передвигаться, и в тот момент, когда датчики подходят под задающую нить, злектрогидроклапаны закрываются и оста навливают базу.. Недостатком устройства является то, что оно не обеспечивает порционированной подачи базы на забой с заданной толщиной стружки Наиболее близким к изобретению по технической сущности и Достигаемому результату является устройство для управления перемещением базы механизированной- крепи, включающее направляющие нити, закрепленные в опережающих очистной забой горных выработках, приводнь.1е механизмы, установленные на концевых секциях базы, каждый из кото.рых выполнен из барабана, храпового механизма и приводного гидроцилиндра, распределительное устройство, датчики и гйдродомкраты передвижения 2. Устройство рабютает следующим образом. При переключении гидрораспределителя на передвижку базы жидкость из напорной магистрали поступает в порщневую полость гидродомкратов передвижения базы, благодаря чему база перемещается на забой. Одновременно жидкость под давлением поступает через редукционный клапан и в приводной гидравлический механизм, который при помощи храпового колеса поворачивает барабан на не 3.7 который угол, наматывая на себя гибкую нить на величину, равную перемещению базы. При повороте барабана датчик, установленный на секции базы, вьщает в линию связи электрические импульсы, которые учитываются счетчиком на пульте оператора. Недостатком его является также невозможность обеспечения фронтальной псдачи базы на зйданную величину. Цель изобретения - обеспечение фронтальной подачи базы на заданную величину. Цель достигается тем, что приводные механизмы установлены на базе посредством подвижных площадок в виде звеньев шарнирных параллелограммов с профильными упорами и возвратными пружинами, а устройство снабжено дополнительной нитью, натянутой вдоль базы, закрепленной На подвижных плоЩаДКаХ, и электрогидроклапанами для управЛени:я домкратами передвижения, связанными с Датчиками, Kotopbie установлены на промежуточных секциях базы с возможностью взаимодействия с дополнительной нитью, при этом распределительное устройство выполнено из двух обратно-разгруэошых клапа11ов, подключенных соответственно к рабочей полости йрййЬДного тидроцйлиндра и к полости гидро домкрата передвижения концевой секции ба3lJ и установленных с возможностью взаимодействия своими щтоками с профильными упорами подвижной площадки в ее крайних положениях. На фиг. 1 изображена принципиальная схема предлагаемого устройства и разрез А-А; на фиг. 2 - схема привязки устройства к базе агрегата. На концевой секции базы 1 агрегата, перед вигаемой в плоскости пласта при помощи гидродомкрата 2, закреплена подвижно площадка 3, на которой установлен барабан 4, снабженный храповиком 5, п{ иводным гидро 11илиндр6м 6 и гибкой нитью 7, свободный конец которой закреплен в опережающей очисткой забой горной выработке. В крайних положениях по ходу перемещения площадка взаимодействует с обрашо-раз груэочнь1ми клапанами 8 и 9, подключенным соответственно к т1® рЙ Тт рШ61ШВШ концевой секции базы и к рабочей полости прИВбдногЬ гидроциггййдра, оттягиваемая до упора пружиной 10.. На площадке закреплена задающая гибкая нить it, натянутая вдоль базыагрегата, на промежуточных секциях которой закреплены датчики 12 и 13, соединенные электрически с электр(гидроклапанами 14, гюдклйчен1яыми к гидродомкратам 15 промежуточных секций базы, jx eWiHeHHMM с посадочными секциями 16 . Давление |зВочей Твдк6сти подво
;SjSStiSS r-l-- ±aE fti3 ;:-;r . ..fii-xsjas ится к устройству по гидромагистралям 1719 и по трубопроводам 20 и 21. Устройство работает следующим образом. Для передвижки базы 1 агрегата на забой по гидромагйстрапи 17 давление рабочей жидкости подают через обратно-разгрузочный клапан 9 и трубопровод 20 в приводной гидроцилиндр 6, который через храповик 5 поворачивает барабан 4 на некоторый угол, наматывая на себя гибкую нить 7. При этом площадка 3 перемещается из крайнего правого в крайнее левое положение, благодаря чему обратно-разгрузочный клапан 9 закрывается, а клапан 8 открывается, и давление рабочей жидкости из гндромагистрали 18 по трубопроводу 21 поступает в поршневую полость гидродомкрата 2 передвижки концевой секции базы. Одновременно с перемещением обеих площадок ,3 перемещается на заданный щаг и задающая гибкая нить по всей длине лавы, взаимодействуя с датчиками 12, которые приводят к открыванию электрогидроклапанов 14, и рабочая жидкость поступает также в поршневые полости гидродомкратов 15 промежуточных секций. Начинается движение базы 1 агрегата на забой относительно неподвижной теперь задающей гибкой нити 11. Под действием пружины 10 площадка возвращается в исходное положение до упора. При этом обратно-разгрузочный клапан 8 перекрывает доступ рабочей жидкости .в гидро-; домкрат 2 и концевая секция базы останавливается, а обратно-разгрузочный клапан 9 открывается, выпуская порцию рабочей жидкости из гидроцилиндра 6, благодаря чему он под действием пружины возвращается в исходное состояние. Задающая гибкая нить 11, взаимодействуя с датчиками 13, приводит к закрыванию электрогидроклапанов 14 и прекращению доступа рабочей жидкгости в гидродомкраты 15 промежуточных секций. База останавливается, и затем цикл передвижки ее на забой повторяется. При включении в работу только одной из шбЩаДок происходит перемещение задающей гибкой нити на забой одним флангом, а следовательно, и разворот базы относительно неподвижной точки. Таким обраэом, предлагаемое устройство Позволяет решить одну из актуальнейших задач автоматизации забойных машИИ - централизаванное управление с пульта оператора направленным передвижением базы очистного агрегата в пло,скости пласта. В настоящее время предлагаемое устройство Проходит прбмыщленные испытания в щахте.
Формула изобретений.
Устройство для управления перемещением базы механизированной крепи, включающее направляющие нити, закрепленные в опережающих очистной забой горных выработках, приводные механизмы, установленные на концевых секщ1ях базы, каждый из которых выполнен из барабана, храпового механизма и приводного гидроцилиндра, распределительное устройство, датчики и гидродомкраты передвижения, о тл ичающееся тем, что, с целью обеспечения фронтальной подачи базь на задайную величину, приводные механизмы установлены на базе посредством подвижных площадок в виде звеньев щарнирных параллелограммов с профильными упорами и возвратными Пружинами, а устройство снабжено дополнительной нитью, натянутой вдоль базы, закрепленной на подвижных площадках, и электрогндроклапанами для управления домкратами передвижения.
7263476
связанными с датчиками, которые установлены на промежуточных секциях базы с возможностью взаимодействия с дополнительной нитью, при этом распределительное устройстйо 5 выполнено из двух обратно-разгрузочных клапанов, подключенных соответственш к рабочей полости приводного гщроцилиндра и к полости гидродомкрата передвижения концевой секции базы и установленных с возможностью взаимо10 действия своими щтоками с профильными упорами подаижной площадки в ее крайних положениях.
-Источники информации, принять1е во внимание при зкспертизе
1.Виницкий В. И. и др. Разработка системы автоматического обеспечения прямолинейности стругового агрегатд. - Проблемы горного дела. М., Недра, 1974.
2.Авторское свидетельство СССР № 353049, кл. Е 21 О 23/26, 1971 (прототип).

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления перемещением базы механизированной крепи | 1978 |
|
SU787673A1 |
| Система управления передвижением базы механизированной крепи | 1980 |
|
SU909204A1 |
| Устройство для управления перемещением базы механизированной крепи | 1978 |
|
SU727857A1 |
| Устройство автоматического поддержания заданной толщины стружки очистного агрегата | 1979 |
|
SU881343A1 |
| Устройство для управления перемещением базы механизированной крепи | 1979 |
|
SU877057A1 |
| Устройство для управления перемещением базы механизированной крепи | 1980 |
|
SU877058A1 |
| Способ управления перемещением базы механизированной крепи | 1980 |
|
SU877059A1 |
| Способ автоматического поддерживания прямолинейности в плоскости пласта шахтных механизированных крепей | 1967 |
|
SU450892A1 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ ПЕРЕМЕЩЕНИЯ БАЗЫ ОЧИСТНОГО КОМПЛЕКСА ГИДРОДОМКРАТАМИ | 1972 |
|
SU353049A1 |
| УСТРОЙСТВО ДЛЯ ПОДДЕРЖАНИЯ ПРЯМОЛИНЕЙНОСТИ БАЗЫ КРЕПИ | 1991 |
|
RU2024765C1 |