Предметом изобретения является регулируемый поддерживающий упор для установки деталей на металлорежущих станках с применением подвижного упорного пальца, смонтированного в отдельном корпусе или в корпусе зажимного приспособления.
Известны регулируемые поддерживающие упоры, не позволяющие осуществить быстрое перемещение упорного пальца и его жесткую фиксацию при достижении требуемого усилия нажима на обрабатываемое изделие.
Предлагаемый упор отличается тем, что упорный палец выполнен в виде рейки, сопряженной с шестерней, получающей вращение через предельную муфту сцепления от соосно расположенного зажимного винта, шестерня посредством конической ступицы взаимодействует с гнездом корпуса упора, чем достигается возможность быстрого перемещения упорного пальца и его жесткой фиксации при достижении требуемого усилия нажима на обрабатываемое изделие.
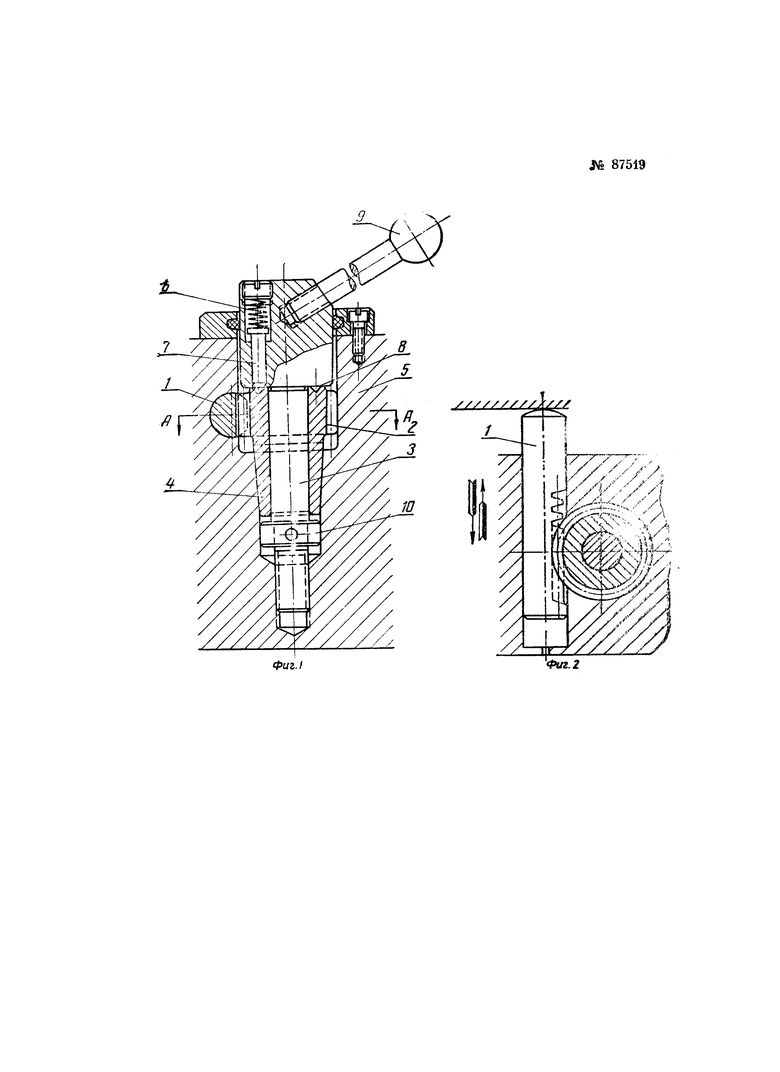
На фиг. 1 изображен разрез регулирующего поддерживающего упора; на фиг. 2 - разрез упора по АА (фиг. 1).
Упорный палец 1 выполнен в виде рейки, сопряженной с шестерней 2, получающей вращение через предельную муфту сцепления от расположенного соосно с шестерней зажимного поворотного винта 3 и взаимодействует конической ступицей 4 с конусным гнездом корпуса 5.
Предельная муфта сцепления выполнена в виде подпружиненного с помощью пружины 6 штифта 7, смонтированного в головке зажимного винта 3 и взаимодействующего с торцовыми лунками 8, расположенными на торце ступицы шестерни 2.
Чтобы подвести упор к изделию, необходимо вращать ручку 9 по часовой стрелке. При вращении ручки вместе с зажимным винтом 3, подпружиненный штифт 7 под действием пружины 6 войдет в одну из лунок 8 и при дальнейшем вращении ручки обеспечит вращение шестерни 2, которая взаимодействуя с упорным пальцем 1, приблизит его к изделию. Когда упорный палец 1 коснется изделия, шестерня 2 остановится, а винт 3 начнет ввинчиваться в конусное гнездо корпуса и фиксировать палец 1.
Для возвращения упорного пальца в исходное положение, ручку 9 необходимо вращать против часовой стрелки, тогда винт 3 будет вывинчиваться и с помощью буртика 10 вытолкнет ступицу 4 из конусного гнезда и оттормозит шестерню 2 и палец 1.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для гибки петли из проволоки | 1989 |
|
SU1745397A1 |
| Машина для натягивания проволочных спиц колеса | 1931 |
|
SU50294A1 |
| БАХРОМО-ВЯЗАЛЬНАЯ МАШИНА | 1936 |
|
SU55198A1 |
| АВТОМАТ ДЛЯ ПОДРЕЗАНИЯ ТОРЦА ЦИЛИНДРИЧЕСКИХ ДЕТАЛЕЙ ТИПА ТОНКОСТЕННЫХ СТАКАНОВ -. | 1970 |
|
SU275643A1 |
| Завинчивающий патрон стационарного устройства для сборки резьбовых соединений | 1982 |
|
SU1039682A1 |
| Устройство для наложения витковой изоляции и намотки катушек электрических машин | 1984 |
|
SU1197012A1 |
| ХИРУРГИЧЕСКИЙ ИНСТРУМЕНТ ДЛЯ НАЛОЖЕНИЯ СКОБОК, СОДЕРЖАЩИЙ МНОГОХОДОВЫЙ ПРИВОДНОЙ МЕХАНИЗМ ЗАПУСКА С ПОВОРОТНОЙ РУЧНОЙ ОТВОДЯЩЕЙ СИСТЕМОЙ С ВОЗВРАТНОЙ ПРУЖИНОЙ | 2006 |
|
RU2420240C2 |
| Клепальный станок | 1975 |
|
SU526432A1 |
| Автооператор | 1974 |
|
SU554129A1 |
| Строповочный замок | 1980 |
|
SU933603A1 |
1. Регулируемый поддерживающий упор для установки деталей на металлорежущих станках с применением подвижного упорного пальца, смонтированного в отдельном корпусе или в корпусе зажимного приспособления, отличающийся тем, что, с целью быстрого перемещения упорного пальца и его жесткой фиксации при достижении требуемого усилия нажима на обрабатываемую деталь, упорный палец выполнен в виде рейки и сопряжен с шестерней, получающей вращение через предельную муфту сцепления от расположенного соосно с шестерней зажимного винта и взаимодействующей своей конической ступицей с конусным гнездом корпуса.
2. Форма выполнения упора по п. 1, отличающаяся тем, что предельная муфта сцепления выполнена в виде подпружиненного штифта, смонтированного в головке зажимного винта и взаимодействующего с торцовыми лунками на ступице шестерни.
