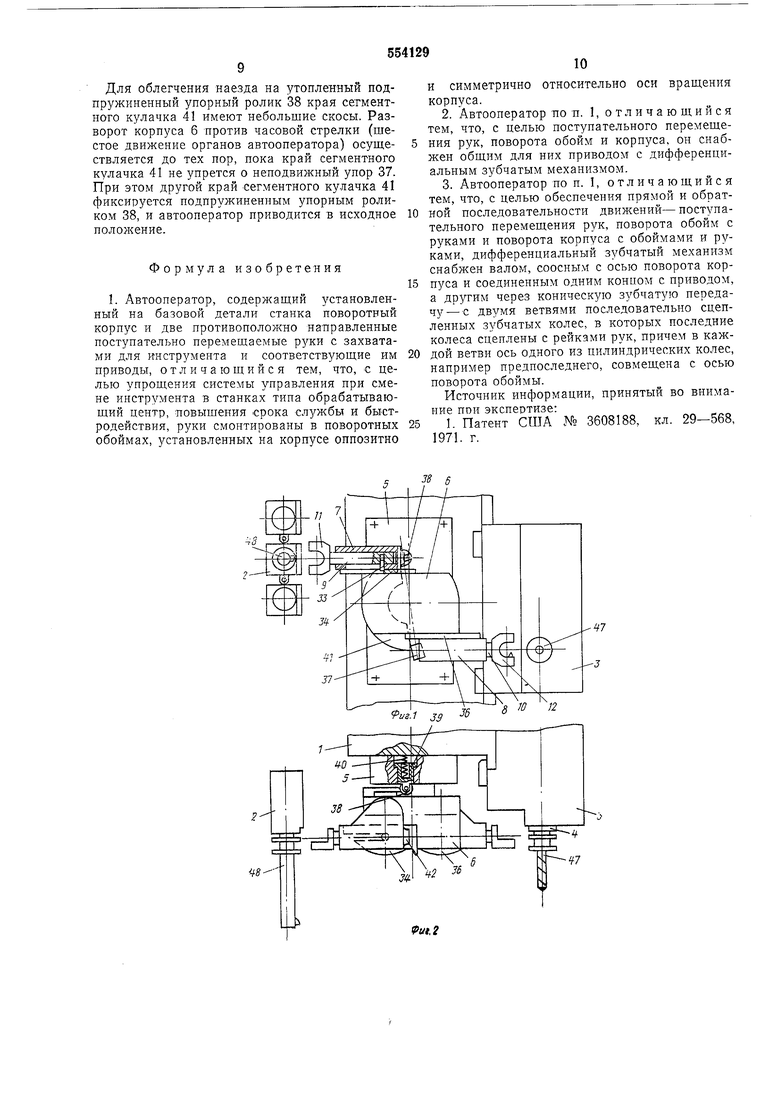
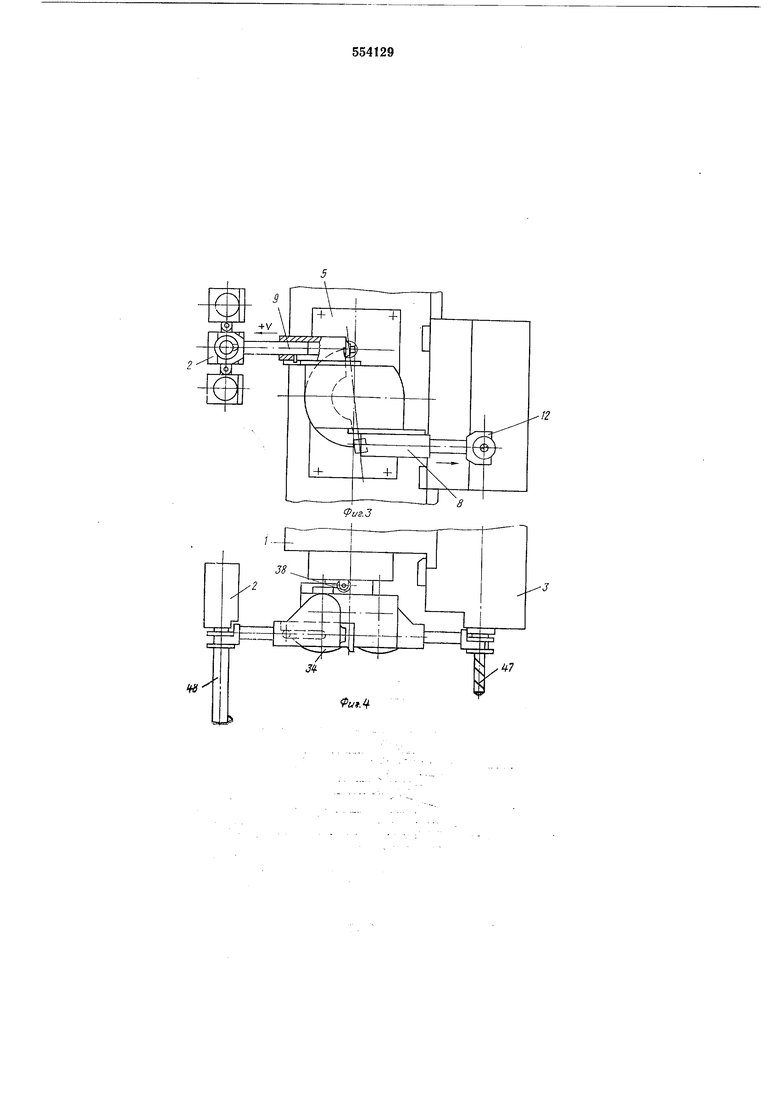
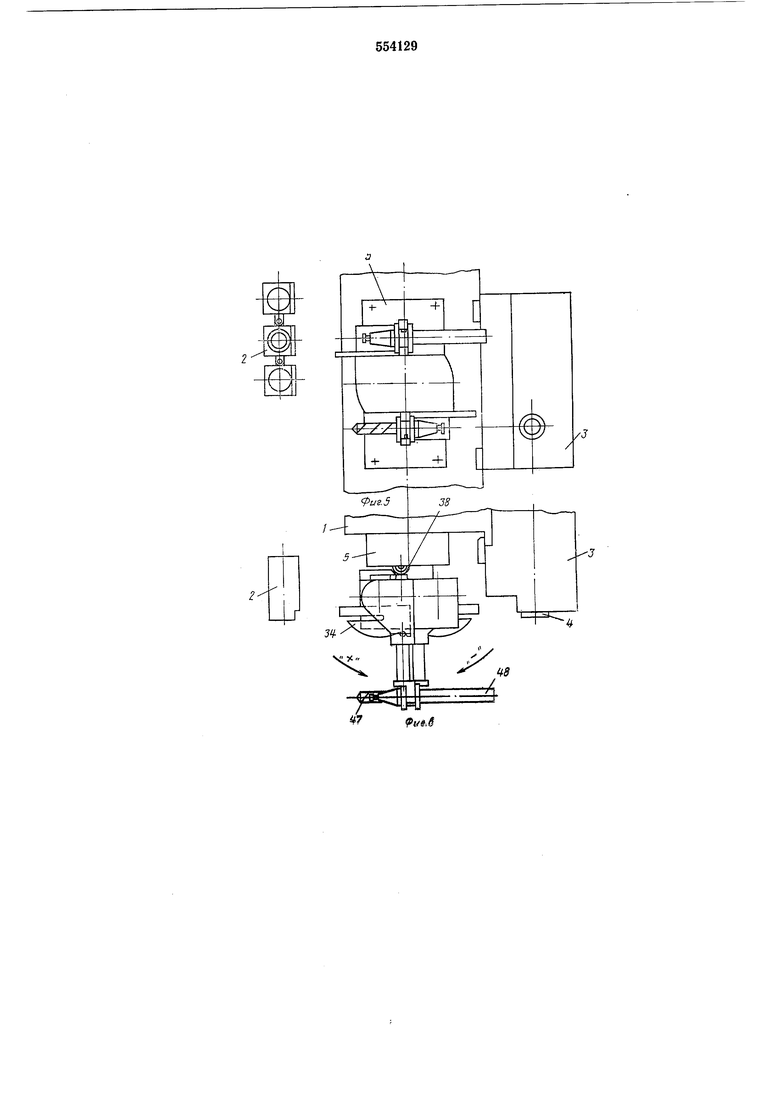
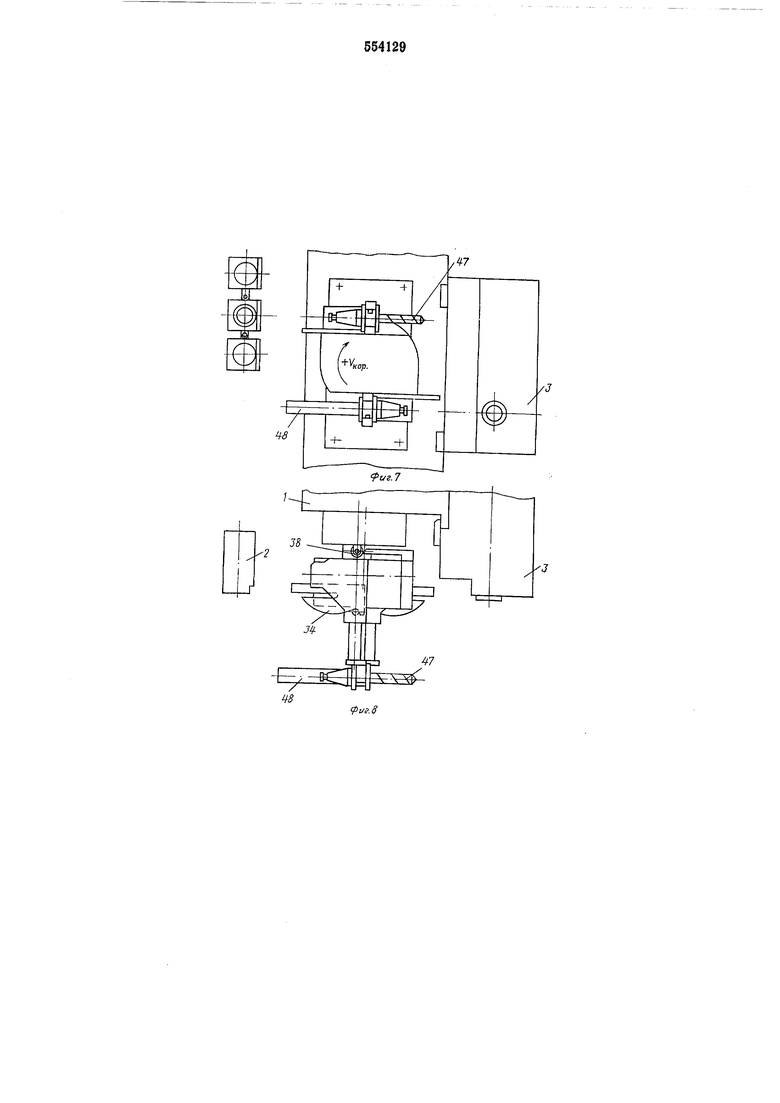
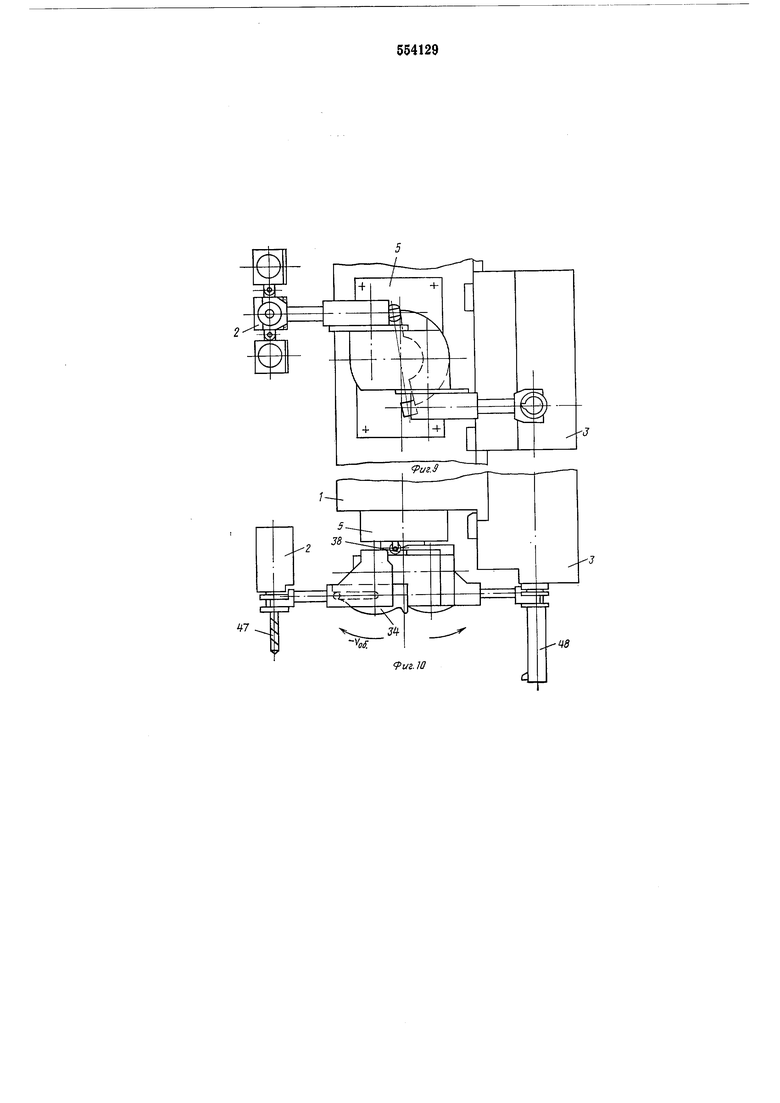
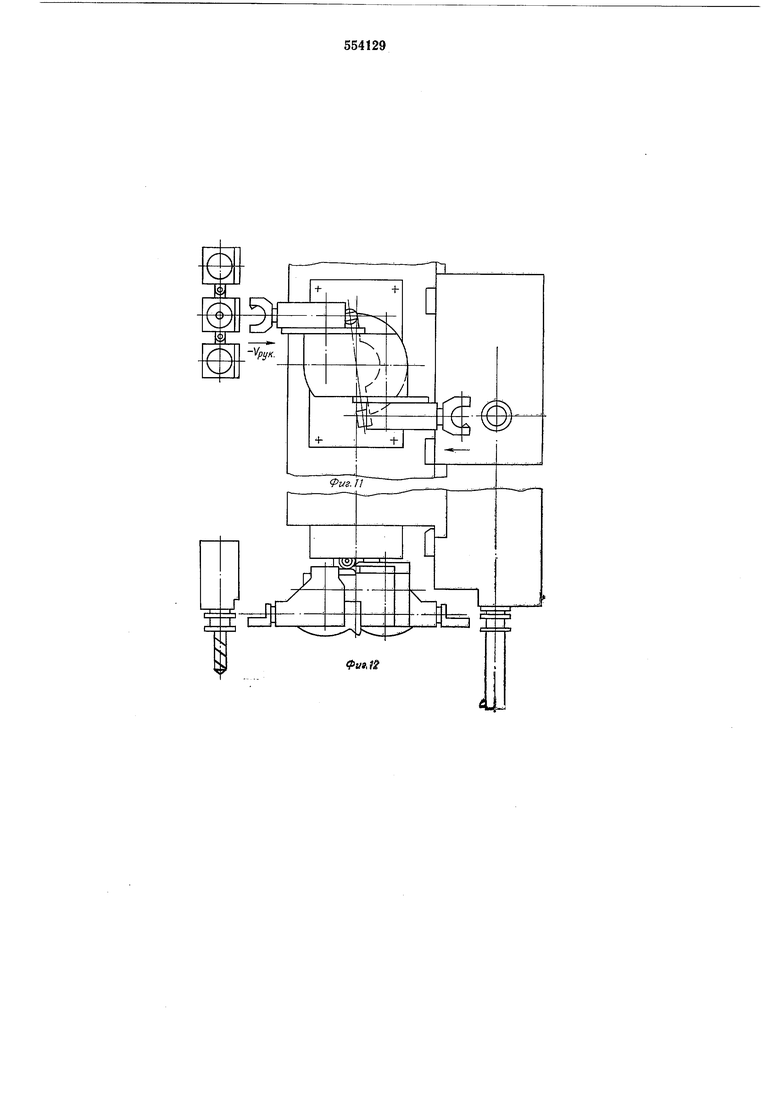
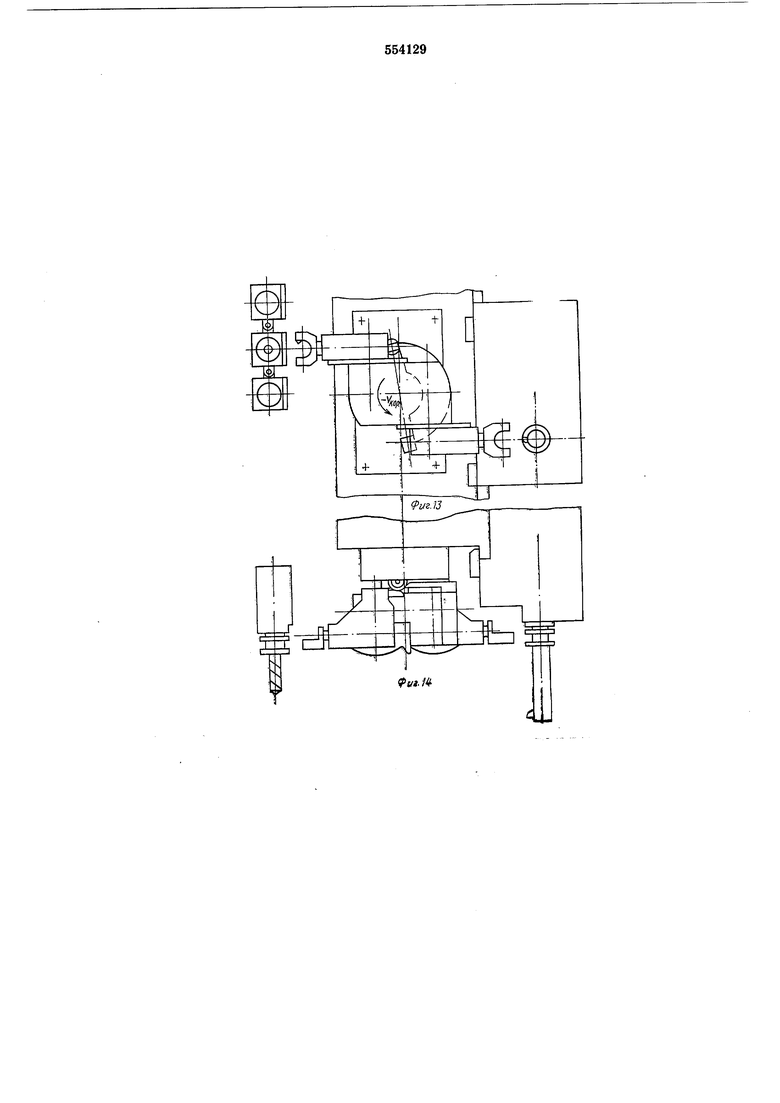
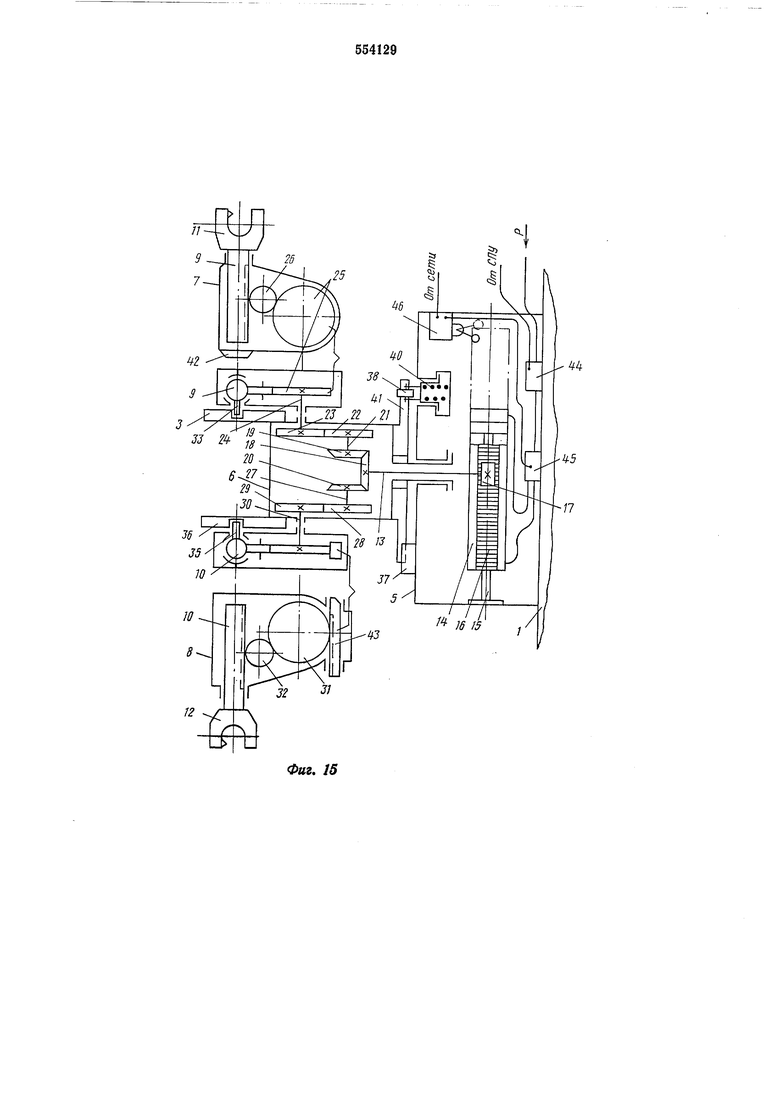
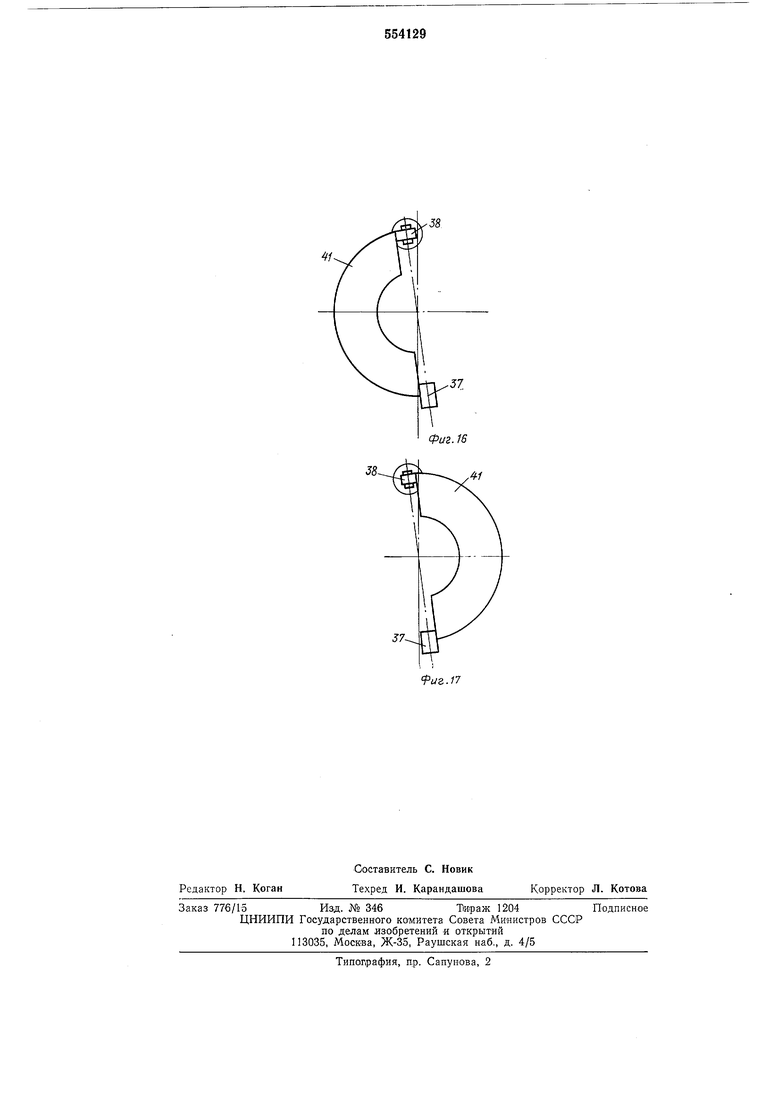
На фиг. 1 и 2 показаны органы азтооператора в исходном положении, т. е. перед сменой инструмента (вид спереди и в плане); на фиг. 3 и 4 - органы автокооператора в начале его работы, с выдвинутыми к периферии руками для захвата инструмента (вид спереди и в плане); на фиг. 5 и 5 - органы автооператора при сведенных к центру обоймах с выдвинутыми-руками (вид спереди и в плане); на фиг. 7 и 8 - органы автооператора после поворота головки на 180° по часовой стрелке вместе со сведенными обоймами и выдвинутыми руками, т. е. обмен месторасположением в пространстве отработавшим и подготовленным для смены инструментами (вид спереди и в плане); на фиг. 9 и 10 - органы автооператора при вложенных в ячейку магазина и шпиндель станка замененных инструментах путем разведения обойм с выдвинутыми руками (вид спереди и в плане); на фиг. 11 и 12 - органы автооператора при отведенных к центру руках, после замены инструментов в шпинделе станка и в ячейке магазина (вид спереди и в плане); на фиг. 13 и 14 - органы автооператора перед поворотом корпуса на 180° против часовой стрелки, т. е. возврата автооператора в исходное положение (вид спереди и в плане); на фиг. 15 - кинематическая схема автооператора; на фиг. 16--схема положения сегментного кулачка относительно жесткого и подпружиненного упоров в положении органов автооператора до поворота корпуса на 180° по часовой стрелке; на фиг. 17 -то же, что и на фиг. 16, но после поворота корпуса на 180° по часовой стрелке.
Предлагаемый автооператор на металлорежущем станке, например горизонтально-расточном, наиболее удобно располагается на передней стенке стойки 1. Магазин же с инструментом (на фигурах показаны его ячейки 2) располагается за стойкой относительно шпиндельной бабки 3. Шпиндельная бабка имеет расточный шпиндель 4 и может перемешаться только по вертикали (см. фиг. 1 и 2).
К передней стенке стойки 1 крепится плита 5 автооператора, на которой смонтирован поворотный корпус 6. Ось враш,ения поворотного корпуса параллельна оси шпинделя. Плита 5 может быть съемной или может быть отлита вместе со стойкой станка, т. е. является базовой деталью станка.
На поворотном корпусе 6 оппозитно и симметрично относительно оси его врашения смонтированы поворотные обоймы 7 и 8, в которых расположены поступательно перемешаемые руки 9 и 10 с захватами И и 12 для инструмента, имеющие пружинные защелки, которые не позволяют инструменту выпадать при манипуляциях. В плите автооператора 5 расположен силовой двигатель, вращающий вал 13.
Для движений органов автооператора могут быть использованы различные по конструкции и устройству силовые двигатели, создающие вращение вала. В качестве примера в описании дан силовой двигатель в виде гидроцилиндра 14, шток 15 которого жестко прикреплен к внутренней стенке плиты 5 (см. фиг. 15). На наружной поверхности гидроцилиндра 14 нарезана рейка 16, с которой находится в зацеплении зубчатое колесо Г/, смонтированное на валу 13.
На другом конце вала 13 посажено коническое зубчатое колесо 18, сцепленое с двумя коническими зубчатыми колесами 19 и 20, являющееся началом кинематических ветвей последовательно сцепленных цилиндрических зубчатых колес, в каждой из которых последние колеса сцеплены с рейками, нарезанными на руках 9 и 10.
Кинематическая ветвь к руке 9: коническое зубчатое колесо 19 - вал 21 - пара сцепленных цилиндрических зубчатых колес 22 и 23 - вал 24 - пара сцепленных цилиндрических зубчатых колес 25 и 26 - рейка на руке 9.
Кинематическая ветвь к руке 10: коническое зубчатое колесо 20 - вал 27 - пара сцепленных цилиндрических зубчатых колес 28 и 29 - вал 30 - пара сцепленных цилиндрических зубчатых колес 31 и 32 - рейка на руке 10.
Оси валов 24 и 30, на которых посажены
соответственно зубчатые колеса 23, 25 и 29,31,
являются также осями поворота обойм 7 и 8
вместе с находящимися в них руками 9 и 10.
В руке 9 жестко закреплен палец 33, который проходит сквозь паз в обойме 7 и находится в контакте с закрепленным на корпусе плоским кулачком 34, имеющим прямоугольный участок в виде паза и дуговой выпуклый участок (см. фит. 6).
Аналогичный механизм имеет также рука 10: ее палец - 35 находится в контакте с закрепленным на корпусе плоским кулачком 36, имеющим прямоугольный и дуговые участки (см. фиг. 7).
На плите 5 установлены жесткий упор 37, подвижный подпружиненный утапливаемый упор, состоящий из упорного ролика 38, установленного в стака не 39 с буртиком, исключающий выпадение его из расточки в плите 5. Стакан 39 подпружинен пружиной 40.
На задней стенке корпуса 6 закреплен сегментный кулачок 41, взаимодействующий с жестким упором 37 и подпружиненным упорным роликом 38. Для утапливания подпружиненного упорного ролика 38 на тыльной стороне обоймы 7 установлен неподвижный упор
42, а в обойме 8 смонтирован выдвижной толкатель 43, на котором нарезана рейка, находящаяся в зацеплении с зубчатым колесом 31. Для подачи под давлением жидкости в гидроцилиндр 14 от насосной станции (на фигуpax не указана) служат электрогидравлические золотники 44 и 45, подключенные соответственно к системе ПУ станка и конечному выключателю 46, смонтированному на плите 5. Работает предлагаемое устройство .следующим образом.
Первоначально рассмотрим работу органов автооператора при смене инструмента, а затем - кинематические и силовые связи, обеспечивающие эту работу.
На фиг. 1 и 2 показано исходное положение органов автооператора перед сменой инструмента, т. е. перед снятием из шпинделя станка 4 отработавшего сверла 47 и заменой его расточной оправкой 48. В этом положении руки 9 и 10 с захватами И и 12 втянуты внутрь, сегментный кулачок 41 расположен слева от линии, проходяш,ей через оси неподвижного 37 и подвижного 38 упоров и зафиксирован ими (см. также фиг. 16).
Гидроцилиндр 14 в исходном положении автооператора находится внизу (см. фиг. 15). На фиг. 1 и 2 также показано, что шпиндельная бабка 8 установлена в положение для обеспечения возможности смены инструмента, т. е. ось шпинделя 4 совмешена с осью руки 10 и захвата 12, и ячейка магазина 2 с необходимым инструментом установлена так, чтобы ась очередного инструмента была совмеш,ена с осью руки 9 и ее захвата И. Установка шпиндельной бабки 3 и ячейки магазина 2 в эти положения производится системой программного управления (СПУ).
Работа автооператора состоит из шести движений отдельных его органов. Первые три движения, при которых осуш,ествляется в итоге обмен месторасположением в пространстве отработавшего и очередного (подготовленного для смены) инструмента, составляют первую фазз работы, а остальные три движения - вторую фазу. При второй фазе осуш,ествляется установка обменявших месторасположение инструментов в шпиндель станка и в ячейку магазина и возврат автооператора в исходное положение.
Первая фаза состоит из следуюш,их трех движений.
Первым движением органов автооператора при смене инструмента является выдвижение рук 9 и 10 к периферии, т. е. к шпинделю 4 и ячейке магазина 2, для сцепления своими захватами с заменяемыми инструментами. По окончании этого движения от СПУ подается команда в шпиндельное устройство станка на отжим инструмента. В ячейке магазина инструмент фиксируется пружинной заш,елкой, силу которой рука легко преодолевает при последуюш,ем удалении инструмента (см. фиг. 3 и 4), что избавляет от необходимости подачи управляюш,их сигналов.
Вторым движением органов автооператора (см. фиг. 5 и 6) является сведение обойм 7 и 8 (с выдвинутыми руками 9 и 10) к центру, т.е. к оси врашения корпуса 6. При этом движении инструменты (в нашем примере расточная оправка и сверло) вынимаются из своих конусных гнезд в шпинделе 4 и в магазине 2.
Третьим движением органов автооператора (см. фиг. 7 и 8) является разворот корпуса 6 по часовой стрелке на 180°. С осуш,ествлением этого движения расточная оправка и сверло меняются местами в пространстве.
Вторая фаза состоит из следующих трех движений, которые по своему характеру обратны трем двил ениям первой фазы, но последовательность их несколько изменена (для исключения путаницы движения второй фазы имеют порядковые .названия - четвертое, пятое и шестое).
Четвертым движением (см. фиг. 9 и 10) органов автооператора является разведение обойм 7 и 8 с выдвинутыми руками 9 и 10 и вкладка поменявшихся местами инструментов в ячейку магазина 2 и в шпиндель станка 4.
По окончании этого движения от СПУ станка подается сигнал в зажимной механизм шпинделя 4 на зажим инструмента.
Пятое движение (см. фиг. 11 и 12) --отвод рук к центру от замененных инструментов.
Шестое движение (см. фиг. 13-14) органов автооператора осуществляется поворотом головки 6 на 180° против часовой стрелки, в результате чего автооператор возвращается в исходное положение.
Для осуществления смены автооператором отработавшего и очередного инструментов от СПУ станка подается сигнал на пусковой электрогидравлический золотник 44, который пропускает жидкость под давлением в электрогидравлический реверсивный золотник 45. Последний, находясь в нормально-открытом состоянии (от управляющего им конечного выключателя сигнал отсутствует) направляет поток жидкости в верхнюю часть гидроцилиндра 14.
Гидроцилиндр 14 начинает двигаться вверх, так как его шток 15 закреплен на внутренней стенке плиты 5. Двигаясь вверх, гидроцилиндр 14 начинает вращать зубчатое колесо 17 посредством своей рейки 16 и этим создает на валу 13 крутящий момент, направленный по часовой стрелке, т. е. со стороны конического зубчатого колеса 18.
Крутящий момент с вала 13 через конические колеса 18, 19 и 20 передается на кинематические ветви последовательно сцепленных цилиндрических колес, последние из которых сцеплены с рейками, нарезанными на руках 9 и 10. Поскольку цилиндричес ше зубчатые колеса каждой кинематической ветви находятся в корпусе, в поворотном кронштейне и сцеплены с рейкой руки, то и усилие от крутящего момента на валу 13 одновременно передается на эти органы автооператора, в
этом заключается основной принцип дифференциальности зубчатого механизма, обладающего последовательно тремя степенями свободы. Под действием усилий от направленного по
часовой стрелке крутящего момента на валу 13 корпус 6 стремится повернуться по часовой стрелке, обоймы 7 и 8 развернуться вокруг оси валов 24 и 30 и свестись к центру, а руки 9 и 10 выдвинуться к периферии. Однако
благодаря наличию кинематических связей между этими тремя органами автооператора перечисленные движения одновременно не происходят, так как повороту корпуса препятствует подвилсный упор 38, а повороту обойм при втянутых руках препятствуют пазы в плоских кулачках 34 и 56. Таким образом из исходного положения создаются условия для осуществления только одного движения: выдвижение рук 9 и 10 к периферии. Выдвижение рук 9 и 10 к периферии является первым движением -органов автооператора при смене инструмента. По окончании этого движения концы пальцев 33 и 35, установленные на руках 9 и 10 и двигаюпдиеся вместе с ними, выходят из пазов плоских кулачков 34 и 36 и дают возможность поворачиваться обоймам 7 и 8 вокруг осей валов 24 и 30 - начинается .второе движение органов автооператора. При этом дальнейшее выдвижение рук 9 и 10 оказывается невозможным, так как средние части пальцев 33 и 35 упрутся в края пазов обойм 7 и 8 (см. фиг. 3). По окончании второго движения - сведения обойм 7 и 8 к центру - обойма 7 своим неподвижным упором 42 нажимает на подпружиценный упорный ролик 38, который утапливается; этим ликвидируется упор, действовавший на край сегментного кулачка 41 и предотвраш,авший враш,ение скрепленного с ним корпуса 6. В создавшихся условиях под действием крутяш,его момента на валу 13 корпус 6 начинает разворачиваться по часовой стрелке и продолжает это движение до тех пор, пока край сегментного кулачка 41 пе встретится с неподвижным упором 37, т. е. будет осуществляться третье движение органов автооператора. При упоре переднего по ходу края сегментното кулачка 41 о неподвижный упор 37 подпружиненный упорный ролик 38 освобождается от нажима на него тела сегментного кулачка 41 и под действием пружины 40 выдвигается и фиксирует другой край сегментного кулачка 41 (см. фиг. 17). Таким образом, в результате осуш,ествления третьего движения, корпус 6 поворачивается на 180° по часовой стрелке и при помощи скрепленного с ним сегментного кулачка 41, края которого зафиксированы неподвил :ным упором 37 и подпружиненным упорным роликом 38, будет надежно находиться в этом положении (см. фиг. 17). Три движения (выдвижение рук к периферии, сведение обоймы к центру и -поворот корпуса на 180°), составляющие первую фазу работы автооператора, выполняются за один ход вверх гидроцилиндра 14. В конце хода гидроцилиндра 14 вверх он нажимает на конечный выключатель 46, по сигналу которого срабатывает электрогидравлический реверсивный золотник 45, меняющий направление движения жидкости под давлением. Она направляется в нижнюю часть гидродилиндра 14; гидроцилиндр начинает двигаться вниз. Следует отметить, что органы автооператора отрегулированы таким образом, чтобы срабатывание конечного выключателя 46 происходило после полного завершения третьего движения, т. е. фиксации подпружиненным упорным роликом 38 повернутого на 180° по часовой стрелке сегментного кулачка 41, вращающегося вместе с корпусом 6. При движении гидроцилиндра 14 вниз осуществляются последующие три движения, составляющие вторую фазу работы автооператора, при которой крзтящий момент на валу 13 меняет свой знак, т. е. становится направленным против часовой стрелки. Соответственно поменяют знак направления действия все силы, возникающие в дифференциальном зубчатом механизме с тремя степенями свободы от действия крутящего момента на валу 13. После окончания третьего движения положение органов автооператора таково, что свободными органами, могущими двигаться, являются обоймы 7 и 8, которые вместе с выдвинутыми руками 9 и 10 могут разводится и вложить в шпиндель и в ячейку магазина поменявшие месторасположения инструменты. Это связано с тем, что другие движения невозможны - втягиванию рук внутрь (к центру) препятствуют дуговые участки плоских кулачков 34 и 36, а от поворота корпус 6 с сегментным кулачком 41 зафиксирован неподвилшым упором 37 и подпружиненным упорным роликом 38. Таким образом, в начале второй фазы работы автооператора происходит разведение обойм 7 и 8 с выдвинутыми руками 9 и 10 и вкладывание инструментов в шпиндель станка и в ячейку магазина-это четвертое движение автооператора. По окончании этого движения пальцы 33 и 35 сходят с дуговых участков плоских кулачков 34 и 36 и упираются в стенки прямолинейных участков пазов (см. фиг. 10), -что исключает дальнейший поворот обойм 7 и 8, создается возможность для осуществления пятого двил ения-двил ения рук 9 и 10 к центру от замененных инструментов. Одновременно с движением рук к центру осуществляет прямолинейное движение от центра выдвижной толкатель 43, смонтированный в обойме 8 и двигающийся в противоположном направлении, нежели рука 10 относительно обоймы 8. Это вызвано тем, что выдвижной толкатель 43 своей рейкой сцеплен с зубчатым колесом 31, которое сцеплено с зубчатым колесом 32, а последнее - с рейкой руки 10. После осуществления третьего движения - поворота корпуса 6 на 180° - выдвил ной толкатель 43 оказывается около подпружиненного порного ролика 38. Таким образом в конце ятого движения руки 9 и 10 втянуты внутрь (к центру), а выдвил ной толкатель 43 выдвиут к периферии. При этом он своим скощеным концом осуществляет на подпру иненный упорный ролик 38, утапливая его. то создает возможность для поворота корпуа 6 против часовой стрелки под действием рутящего момента на валу 13. Для облегчения наезда на утопленный подпружиненный упорный ролик 38 края сегментного кулачка 41 имеют небольшие скосы. Разворот корпуса 6 против часовой стрелки (шестое движение органов автооператора) осуществляется до тех пор, пока край сегментного кулачка 41 не упрется о неподвижный упор 37. При этом другой край сегментного кулачка 41 фиксируется подпружиненным упорным роликом 38, и автооператор приводится в исходное положение. Формула изобретения 1. Автооператор, содержащий установленный на базовой детали станка поворотный корпус и две противоположно направленные поступательно перемещаемые руки с захватами для инструмента и соответствующие им приводы, отличающийся тем, что, с целью упрощения системы управления при смене инструмента в станках типа обрабатывающий центр, Повышения срока службы и быстродействия, руки смонтированы в поворотных обоймах, установленных на корпусе оппозитно
J8 б
i .l 33
да
9ui.2 оси вращения и симметрично относительно корпуса. 2.Автооператор по п. 1, о т л и ч а ю щ и и с я тем, что, с целью поступательного перемещения рук, поворота обойм и корпуса, он снабжен общим для них приводом с дифференциальным зубчатым механизмом. 3.Автооператор по п. 1, отличающийся тем, что, с целью обеспечения прямой и обратной последовательности движений-поступательного перемещения рук, поворота обойм с руками и поворота корпуса с обоймами и руками, дифференциальный зубчатый механизм снабжен валом, соосным с осью поворота корпуса и соединенным одним конном с приводом, а другим через коническую зубчатую передачу- с двумя ветвями последовательно сцепленных зубчатых колес, в которых последние колеса сцеплены с рейками рук, причем в каждои ветви ось одного из цилиндрических колес, например предпоследнего, совмещена с осью поворота обоймы. Источник информации, принятый во внимание пои экспертизе: I. Патент США № 3608188, кл. 29-568, 1971. г.
| название | год | авторы | номер документа |
|---|---|---|---|
| Автооператор | 1976 |
|
SU729028A1 |
| Устройство для автоматической передачи инструмента | 1976 |
|
SU656803A1 |
| Устройство для автоматической смены инструмента | 1989 |
|
SU1698035A1 |
| Автооператор для автоматической смены инструмента | 1984 |
|
SU1255371A1 |
| УСТРОЙСТВО для АВТОМАТИЧЕСКОЙ ПЕРЕДАЧИ ИНСТРУМЕНТА | 1973 |
|
SU375156A1 |
| МАНИПУЛЯТОР ДЛЯ АВТОМАТИЧЕСКОЙ СМЕНЫ ИНСТРУМЕНТОВ | 1973 |
|
SU407708A1 |
| Устройство автоматической смены инструмента | 1983 |
|
SU1117182A1 |
| Автооператор | 1985 |
|
SU1283035A1 |
| СТАНОК С АВТОМАТИЧЕСКОЙ СМЕНОЙ ИНСТРУМЕНТА | 1989 |
|
SU1630172A1 |
| Устройство для автоматической смены инструмента | 1982 |
|
SU1074700A1 |
л.
/
п
X
fuf.4
9us.e
V - Л
v-%
+
/«
1
58
