- t; .
Изобретение относится к автоматй Ке и предназначено для использования в системах управления перемещением рабочих органов промышленных механизмов, например в системах. управления функциональными узлами проАКДШтенных тракторов.
Известна электрогидравлическая следящая система, содержащая гидродвигатель с электромагнитами,бЛок -задания, датчик обратной связи, фазочувствительный усилитель и переключакяцее устройство 1 .
Недостатками данной системы являются малое быстродействие и низкая точность.
Наиболее близкой по технической сущности к предлагаемой является система, содержащая датчик скорости гидропривода, выход которого кинематически соединен с рабочим органом, первый суммирующий блок,первый и второй входы которого соединены соответственно с выходами задающего блока и датчика перемещения рабочего органа, а выход - со входом первого фазочувствительного усилителя р.
Недостаткс1ми известной системы являются малое быстродействие и низкая точность.
Цель изобретения - повышение быстродействия и точности системы.
Эта -цель достигается тем, что в электрогидравлическую следящую, систему введены второй фазочувствительныи усилитель, электродвигателе,
10 первый и второй триггеры, первый и второй элементы И, второй суммирующий блок, первый, второй, третий и четвертью входы которого соединены соответственно с выходами первого 15 фазочувствительяого усилителя, датчика скорости гидропривода, первого и второго элементов И,а выход через второй фазочувствительный усилитель со входом электродвигателя,
20 вал которого кинематически соединен со входом гидропривода, вход перво го триггера подключен к выходу первого суммирукхаего блока, а первый и второй выходы - соответственно
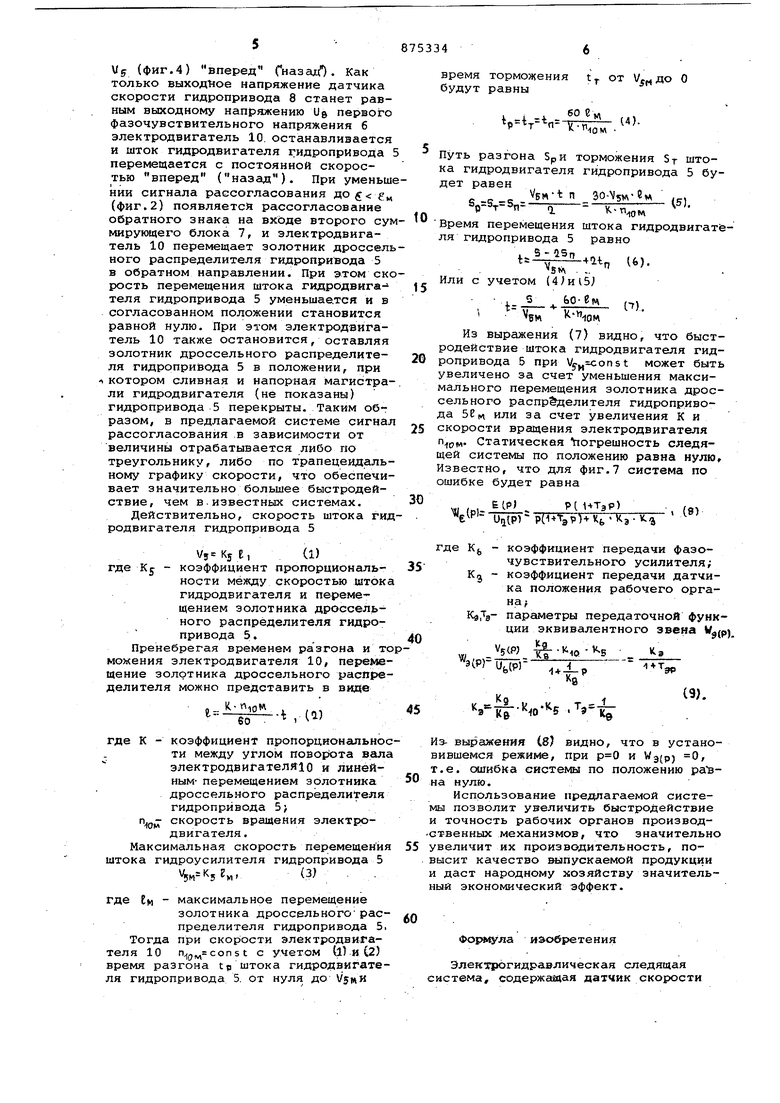
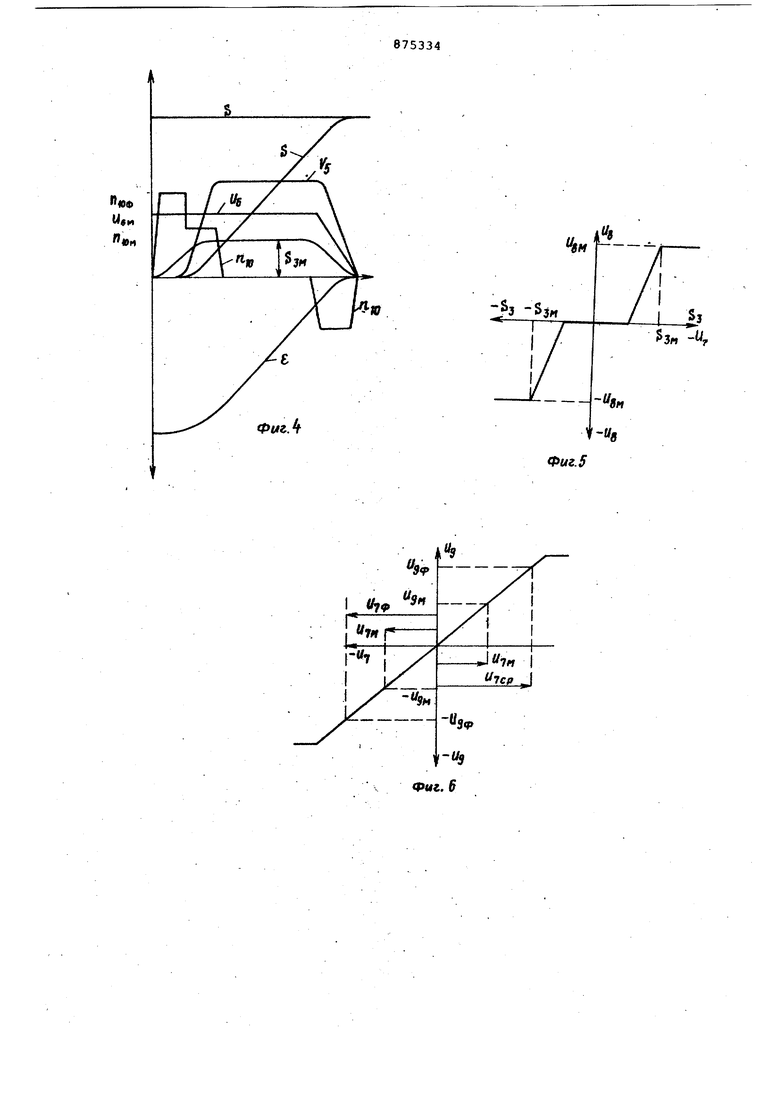
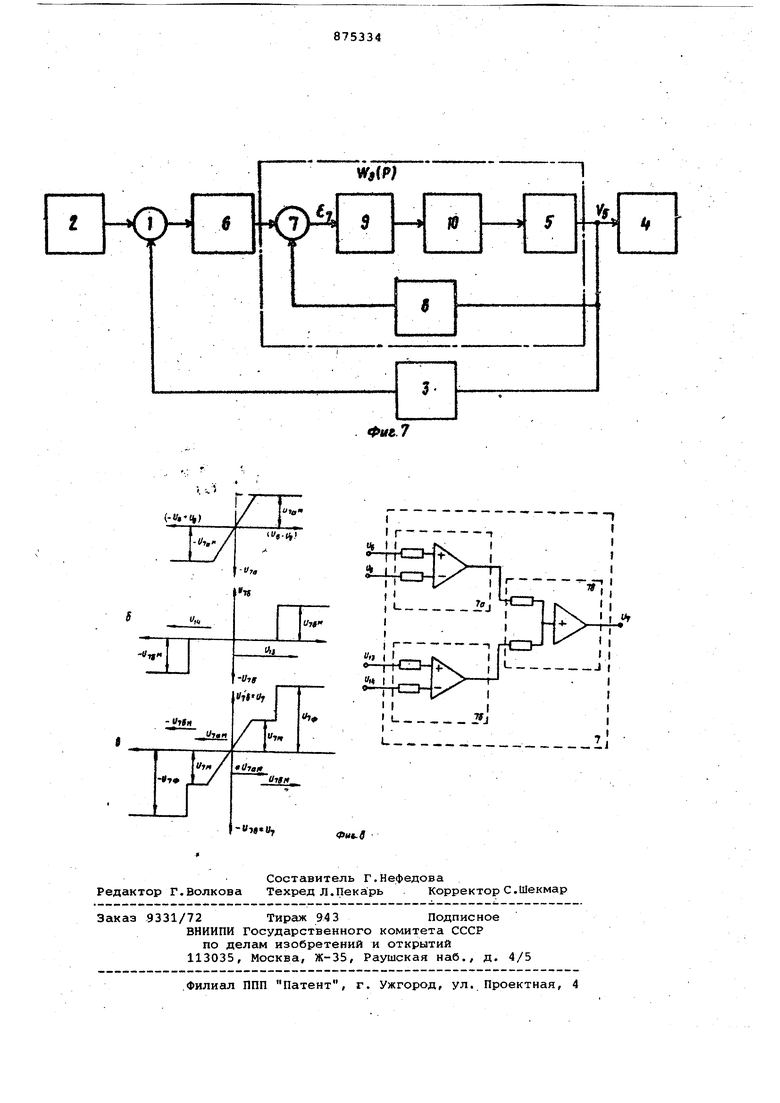
25 к первым входам первого и второго элементов И, вход второго триггера соединен с выходом датчика скорости гидропривода, а первьа) и-второй выходы - соответственно со вторыми 30 входами первого и второго элементов И. На фиг. 1 приведена функциональная схема электрогидравлической след щей системы; на фиг. 2.-зависимость выходного напряжения первого фазоч.1вствигельного усилите ш от сигнала рассогласования, на фиг. 3 - зависимость выходного напряйсенця датчика скорости гидропривода от скорости перемещения штока гидродвигателя гидропривода (выход гидропривода); на фиг. 4 - временная диаграмма работы элементов системы; на фиг. 5 - зависимость выходного напряжения датчика скорости гидропривода от положения золотника дроссельного распределителя гидропривода (входа гидропривода) ; на фиг. б - зависимость выходного напряжения второго фазочув ствительного усилителя р.т выходного напряжения второго суммирующего блока) на фиг. 7 - структурная схема сис TeNttii для анашиза ее статической точности-, на фиг. 8 - функциональная схема второго суммирующего блока (на фиг. 8а, 86, 8в - характеристика его элементов) . Устройство содержит (фиг.1) первый суммирующий блок 1, задающий блок 2, датчик 3 перемещения рабочего органа, рабочий орган 4, гидропривод 5 первый фазочувствительный усилитель второй суммирующий блок 7, датчик 8 скорости гидропривода, второй фазо чувствительный усилитель 9, электродвигатель 10, первый и второй тригге ры 11 и 12, первый и второй элементы И 13 и 14, выходное на11р5гжение пе вого фазочувствительного усилителя U( выходное напряжение второго суммирую щего блока U-, и выходные напряжения его элементов Uya, U и U-, выходное напряжение датчика скорости гидропривода Ug выходное напряжение второго фазочувствительного усилителя Ug, выходные .напряжения первого и вт рого элементов И , и и,сигнал рассогласования с выхода первого сум мирукяцего блока € , положение золотни ка дроссельного распределителя гидропривода S, скорость перемещения штока гидродвигателя гидропривода V скорость вращения электродвигателя .j эквивалентное звено Wjtpj.. Устройство работает следующим образом. В зависимости от величины и знака сигнала рассогласования € появляется соответствующее напряжение 1) на выходе первого фазочувствительного усилителя 6 (фиг.2), которое сравнивается на входе второгосуммирующего блока 7 с напряжением U 8 с выхода датчика скорости гидропривода 8, величина и знак которого определяются напряжением и величиной скорости перемещения V;, штока гидродвигателя гидропривода 5. На третий и четвертый входы второго сум мирующего блока 7 подаются сигналы от первого и второго элементов И 13 и 14. Сигналы на выходах первого и второго элементов И 13 и 14 появляются при реверсе, а при трогании эти сигналы появляются в том случае если движение золотника дроссельного распределителя гидропривода 5 должно происходить в сторону зоны нечувствительности. При этом .сигнал на выходе первого элемента И 13 появляется в том случае, если состояние второго триггера 12 знака скорости перемещения Vy штока гидродвигателя гидропривода 5 соответствует тому, что шток перемещается (или перемещался) вперед, а состояние первого триггера 11 соответствует знаку рассогласования для движения назад. Сигнал на выходе второго элемента и 14 появляется в том случае, если состояние второго триггера 12 соответствует тому, что шток перемещается (или перемещался назад, а состояние первого триггера 11 соответствует знаку рассогласования для движения вперед. При трогании () в сторону зоны нечувствительности на выходе первого (второго) элемента И 13 (И 14) появляется сигнал U(j const (Uj4 const) и на вход второго фазочувствительного усилителя 9 подается сигнал . равный ttКб К7а. ± К7о K7JX X (7в этом с выхода второго фазочувствительного усилителя 9 подается форсирукадий сигнал на электродвигатель 10, который с повышенной скоростью перемещает золотник дроссельного распределителя гидропривода 5 через зону нечувствительности (фиг.4 и фиг.З) при трогании или при реверсе. При сигнале рассогласования ем (фйг.2) выходное напряжение первого фазочувствительного усилителя остается постоянным и равным UAM При этом выгодное напряжение элемента 7а второго суммирукндего блока 7 выбирается таким, при котором выходное напряжение второго фазочувствительного усилителя 9 не превышает значения Ug (фиг.6), соответствующего скорости вращения электродвигателя п, Величина п выбирается из условия устойчивой работы системы.Выходное напряжение датчика скорости гидропривода Ug, соответствующее максимальной скорости V 5 перемещения штока гидродвигателя гидропривода 5, выбирается равнъал И. При наличии сигнала на входе второго суммирунадего блока 7 через второй фазочувствительный усилитель 9 включается .электродвигатель 10. Электродвигатель 10 вращается со скоростью перемещает золотник дроссельного распределителя гидропривода 5 вперед (назад), при этом шток гидродвигателя гидропривода 5 перемещается с нарастающей скоростью Uj (фиг.4) вперед Сназад. Как только выходное напряжение датчика скорости гидропривода 8 станет равным выходному напряжению ив первого фазочувствительного напряжения б электродвигатель 10. останавливается и шток гидродвигателя гидропривода 5 пepeIv eщaeтcя с постоянной скоростью вперед (назад). При уменьше 1нии сигнала рассогласования до{ „ (фиг.2) появляется рассогласование обратного знака на входе второго сум мирующего блока 7, и электродвигатель 10 перемещает золотник дроссель ного распределителя гидропривода 5 в обратном направлении. При этом ско рость перемещения штока гидродвигателя гидропривода 5 уменьшается и в согласованном положении становится равной нулю. При этом электродвигатель 10 также остановится, оставляя золотник дроссельного распределителя гидропривода 5 в положении, при котором сливная и напорная магистрали гидродвигателя (не показаны) гидропривода 5 перекрыты. Таким образом, в предлагаемой системе сигнал рассогласования .в зависимости от величины отрабатывается либо по треугольнику, либо по трапецеидальному графику скорости, что обеспечивает значительно большее быстродействие, чем в.известных системах. Действительно, скорость штока гид родвигателя гидропривода 5 Vj К5 Е, (1) где Ку - коэффициент пропорциональности между скоростью штока гидродвигателя и перемещением золотника дроссельного распределителя гидропривода 5, Пренебрегая временем разгона и то можения электродвигателя 10, перемещение золотника дроссельного распределителя можно представить в виде ч ,(1) где К - коэффициент пропорциональнос ти между углом поворюта вала электродвигателяю и линейным- перемещением золотника дроссельного распределителя гидропривода 5) %м скорость вращения электродвигателя. Максимальная скорость перемещения штока гидроусилителя гидропривода 5 , (3) где ЕМ максимальное перемещение золотника дроссельногораспределителя гидропривода 5, Тогда при скорости электродвига const с учетом W ИЛ2) теля 10 время разгона tp штока гидродвигателя гидропривода 5. от нуля до VSMH время торможения IT от У, О будут равны p-..,. Путь разгона 5рИ торможения ST штока гидродвигателя гидропривода 5 будет равен VgM-t п 30-V5W-8« , 1Бремя перемещения штока гидродвигатёля гидропривода 5 равно ,. VB . Или с учетом ( Из выражения (7) видно, что быстродействие штока гидродвигателя гидропривода 5 при Vj.const может быть увеличено за счет уменьшения максимального перемещения золотника дроссельного распределителя гидропривода 50м или за счет увеличения К и скорости вращения электродвигателя Статическая погрешность следящей системы по положению равна нулю, Известно, что для фиг.7 система по ошибке будет равна Р( НТэР) UilP) Р()4.К(,Кз-К4 где К(, - коэффициент передачи фазочувствительного усилителя; Kj - коэффициент передачи датчика положения рабочего органа ; параметры передаточной функции эквивалентного звена /(р) VP Кэ w-ij;,-- , fa/n -7Т-гг;-- ; - . . в K,« -k«KK .Тз S-K|- «- 5 Из- выражения (8) видно, что в установившемся режиме, при и ) 0, т.е. ошибка системы по положению равна нулю. Использование предлагаемой системы позволит увеличить быстродействие и точность рабочих органов производственных механизмов, что значительно увеличит их производительность, повысит качество выпускаемой продукции и даст народному хозяйству значительный экономический эффект. Фо мйула иаобретения Элек фогидравлическая следящая система, содержаадая датчик скорости
гидропривода, выход которого кинематически соединен с рабочим органом, первый суммирующий блок, первый и второй входы которого соединены сослветственно с выходами заданидего блока и датчика перемемения рабочег органа, а выход - со входом первого фазочувствительного усилителя, о тлич ающая с я тем, что, с целью повьвиения быстродействия и точности системы, она содержит второй фазочувствительный усилитель, электродвигатель, первый и второй триггеры, первый и второй элементы И, второй суммирующий блок, первый, второй, третий и четвертый входы которого соединены соответственно с выходами первого фазочувствительного усилителя, датчика скорости гидропривода, первого и второго элементов И, а выход - через
второй фазочувствительный усилитель со входом электродвигателя, вгш которого кинематически соединен со входом гид{Х привода, вход первого триггера подключен к выходу первого Суммирующего блока, а первый и второй выходы - соответственно к первым входам первого и второго элементов И, вход второго триггера соединен с выходом датчика скорости гидропривода, а первый и второй выходы - соответственно со вторыми входами первого и второго элементов И,
Источники информации, принятые во внимание при экспертизе
1.Авторское свидетельство СССР
(Г 185484, кл. В 27 В 3/36, 17.05.65
2.Следятий привод. Под ред. д.т.и. проф. Чемоданова Б.К. М., Машиностроение, 1974, с.8 (прототип) .
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ управления и синхронизации движения гидротехнического затвора и устройство для его осуществления | 1988 |
|
SU1617086A1 |
| Гидросистема | 1986 |
|
SU1530826A1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКАЯ СЛЕДЯЩАЯ СИСТЕМА | 1996 |
|
RU2111521C1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ ПРИВОД СИСТЕМ УПРАВЛЕНИЯ РАКЕТ И УСТАНОВОК ВООРУЖЕНИЯ | 2005 |
|
RU2295699C1 |
| АВТОНОМНЫЙ ГИДРОПРИВОД-БЛОК ЭЛЕКТРОГИДРАВЛИЧЕСКИХ РУЛЕВЫХ МАШИН | 2003 |
|
RU2262625C2 |
| АВТОНОМНЫЙ ГИДРОПРИВОД-БЛОК ЭЛЕКТРОГИДРАВЛИЧЕСКИХ РУЛЕВЫХ МАШИН | 2004 |
|
RU2261195C1 |
| АВТОНОМНЫЙ ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ РУЛЕВОЙ ПРИВОД С ДОПОЛНИТЕЛЬНОЙ ОБРАТНОЙ СВЯЗЬЮ ПО СКОРОСТИ ГИДРОДВИГАТЕЛЯ | 2024 |
|
RU2826275C1 |
| СИСТЕМА АДАПТИВНОГО УПРАВЛЕНИЯ ЭЛЕКТРОГИДРАВЛИЧЕСКИМ СЛЕДЯЩИМ ПРИВОДОМ | 2009 |
|
RU2430397C2 |
| Гидропривод гидротехнического затвора | 1989 |
|
SU1680859A1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ СЛЕДЯЩИЙ ПРИВОД НЕПОСРЕДСТВЕННОГО УПРАВЛЕНИЯ С АДАПТИВНЫМИ СВОЙСТВАМИ | 2008 |
|
RU2368932C1 |
«6м
-
м
-е-п
-f/ffrt
Фut.г. -ti6
«%.
-ysM
Уу
Фиг. и
Пюф и«и «
«F-/
h
Фиг. 5
