(54) СИСТЕМА ДИСТАНЦИОННОГО КОНТРОЛЯ И УПРАВЛЕНИЯ КОМБАЙНОМ В УГОЛЬНОМ ПЛАСТЕ
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ДИСТАНЦИОННОГО УПРАВЛЕНИЯ МАНЕВРОВЫМ ЛОКОМОТИВОМ | 2010 |
|
RU2432283C1 |
| Устройство автоматического программного управления исполнительными органами угледобывающего комбайна по гипсометрии пласта | 1972 |
|
SU883418A1 |
| Устройство для прицельной остановкипОЕздА | 1979 |
|
SU839808A1 |
| СИСТЕМА СВЯЗИ НАЗЕМНОГО ПУНКТА УПРАВЛЕНИЯ С БЕСПИЛОТНЫМ ЛЕТАТЕЛЬНЫМ АППАРАТОМ | 2024 |
|
RU2825035C1 |
| Автоматизированная радиолиния | 1987 |
|
SU1450118A1 |
| Устройство для передачи и приема информации на транспортном средстве | 1983 |
|
SU1092080A1 |
| Электрошпиндель | 1991 |
|
SU1838048A3 |
| Устройство управления маневровым локомотивом | 1981 |
|
SU1025558A1 |
| Устройство для дистанционного задания маневровых маршрутов с локомотива | 1977 |
|
SU740581A1 |
| Автоматизированная радиолиния | 1987 |
|
SU1443189A1 |
I.
Изобретение относится к горной промышленности н предназначено для контроля н автоматического управления горным комбайном в профиле пласта при различных режимах работы в забое.
Известны.способы н устройства для контроля н управления горным комбайном по пласту, содержащие автогенератор высокой частоты с резонансным колебательным контуром, в который включены параллельно конденсаторный датчик порода-уголь, являющийся одновременно одним из плеч моста постоянного тока, н варикап, включенный в диагональ этого моста. К измерительному автогенератору и кварцевому генератору опорной частоты подключен смеситель, выдающий сигнал разностной частоты указанных генераторов через амплитудный ограничнте)|ь иа дискриминатор, который соединен с индикатором и входом системы автоматического управления режущими орга иами выемочной машины {1).
Известна также снстема дистанционного контроля н управления комбайном в угдльиом пласте, содержащая датчики и устройство порода-уголь и регулятор; Контроль
границы раздела двух сред осуществляется с помощью измерительных резцов (датчиков), подключенных к устройству породауголь, которое вырабатывает сигналы о глубине внедрения режущих органов комбайна в пласт, используя различие констант днэлектрйческой проницаемости и диэлектрических потерь углей и пород, и передает их через индуктивную электропередачу в регулятор комбайна 2.
Недостатками известиой системы являются наличие одного режима работы комбайна - автоматнческого управления режущими органами по гипсометрии без присечки породы почвы и кровли пласта, отсутствие информации у машиниста о глубиие режущих органов в угольном пласте, а также отсутствие дистанционного управлення комбайном.
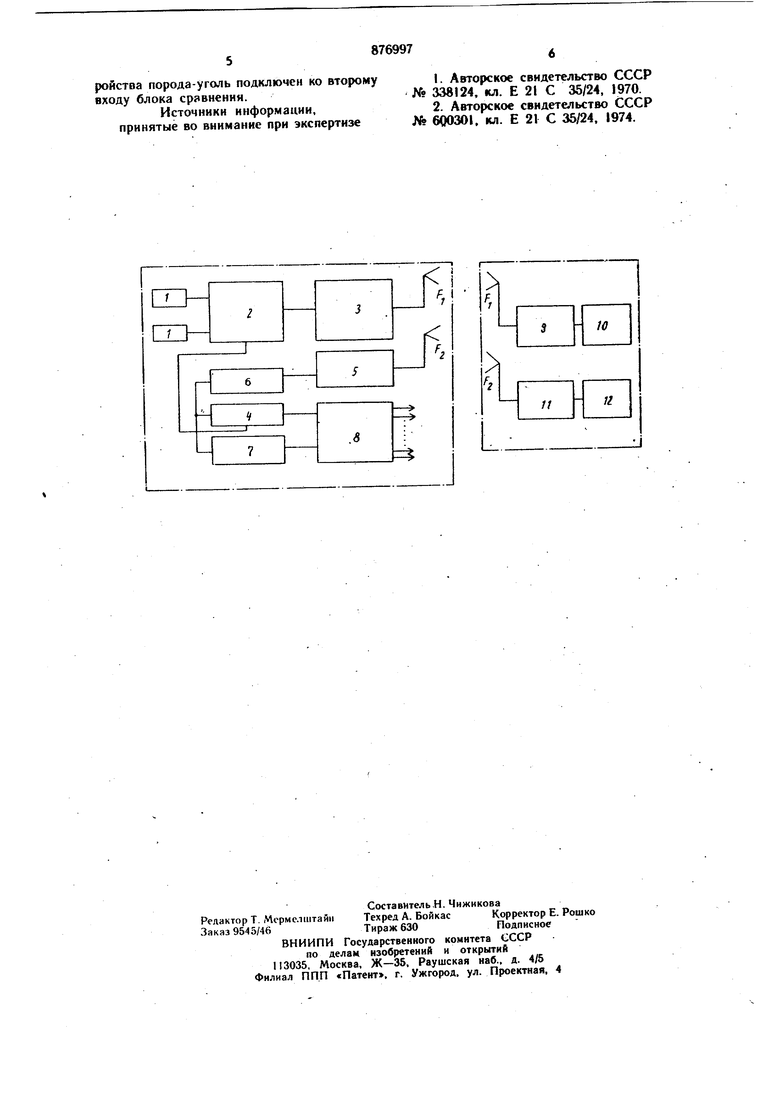
Вместе с тем в условиях эксплуатации часто возннкает необходимость менять режнм работы горного комбайна и присекать породу почвы и кровли с целью выравнивания забоя лавы для нормальной работы автоматизнрованной гндрокрепи и конвейера. Цель изобретения - повышение безопасности и надежности управления комбайном в любом заданном режиме. Поставленная цель достигается тем, что система управления снабжена приемником прямого канала с электронной памятью, передатчиками прямого и обратного каналов, приемником обратного канала, блоком световой индикации, шифратором и дешифратором команд, блоком сравнения и блоком программ, причем вход передатчика прямого канала подключен к выходу устройства порода-уголь, а выход передатчика через радиоканал и приемник с электронной памятью соединен со входом блока световой индикации, а выход шифратора команд через передатчик обратного канала к радиоканал соединен со входом приемника команд управления, которого подключен ко входу дешифратора, а выходы дешифратора подключены соответственно через блок сравнения и блок программ ко входам регулятора комбайна, при этом второй выход устройства порода-уголь подключен ко второму входу блока сравнения. На чертеже схематически представлена предлагаемая система. Датчики 1 и устройство 2 порода-уголь системы вырабатывают сигнал о глубине внедрения режущих органов комбайна в материал пласта, причем своим выходом устройство порода-уголь подключено к передатчику 3 прямого радиоканала и блоку 4 сравнения, приемник 5 команд управления принимает по обратному радиоканалу зашифрованные команды с пульта машиниста и подает их на вход дешифратора 6, выход которого подключен к блоку 4 сравнения и блоку 7 программ. Эти блоки вырабатывают сигналы управления для регулятора 8 и подключены к его входу. Все указанные блоки размещены на комбайне. Приемник 9 с электронной памятью принимает сигнал по прямому радиоканалу от передатчика 3 и передает их в блок Ш световой индикации, который информирует машиниста о положении режущих органов комбайна в массиве пласта. На вход передатчика 11 обратного радиоканала поступают зашифрованные команды управления с шифратора 12. Данные блоки смонтированы в переносном пульте машиниста. Система дистанционного контроля и управления комбайном работает следующим образом. . Датчики I и устройство 2 порода-уголь определяют глубину внедрения режущих органов комбайна в материал пласта и посылают сигнал в радиопередатчик 3 прямого канала, который передает его в переносной пульт машиниста, где принятая радиоинформация запоминается в блоке 9 электронной памяти приемника и контролируется на световом табло блока 10. Руководствуясь информацией светового табло и конкретными условиями работы в забое, машинист на переносном пульте выбирает и задает требуемый режим работы комбайна, для чего корректирует с помощью переключателя режимов ранее полученную радиоинформацию в новый сигнал-уставку, определяющую автоматический режим с полной выемкой пласта, автоматический режим по выбранной программе с частичной присечкой породы у почвы и кровли и т.д.; в ручном, т.е. дистанционном, управлении. Сигнал-уставка шифруется в шифраторе 12 пульта машиниста и передатчиком II обратного радиоканала передается на комбайн, где воспринимается приемником 5 команд управления, обрабатывается в дешифраторе бис его выхода поступает на блок 4 сравнения и блок 7 программ. В этих блоках сигнал окончательно корректируется, усиливается и с их выходов поступает в регулятор 8, а последний управляет комбайном в профиле пласта. Предлагаемая система отличается простотой и надежностью управления комбайном Б любом заданном режиме, причем управление осуществляется на значительном расстоянии от комбайна, что обеспечивает выполнение требований «Правил безопасности в угольных и сланцевых шахтах. Кроме того, при работе комбайна в ручном (дистанционном) режиме управления с пульта машиниста (по радиоканалу) можно передавать 28 команд, причем режим работы может быть изменен в любой момент времени. Формула изобретения Система дистанционного контроля и управления комбайном в угольном пласте, содержащая датчики и устройство прородауголь и регулятор, отличающаяся тем, что, с целью повышения безопасности и надежности управления комбайном, она снабжена приемником прямого канала с электронной памятью, передатчиками прямого и обратного каналов, приемником обратного канала, блоком световой индикации, шифратором и дешифратором команд, блоком сравнения и блоком программ, причем вход передатчика прямого канала подключен к выходу устройства порода-уголь, а выход передатчика через радиоканал и приемник с электронной памятью соединен со входом блока световой индикации, а выход шифратора команд через передатчик обратного канала и радиоканал соединен со входом приемника команд управления, выход которого подключен ко входу дешифратора, а выходы дешифратора подключены соответственно через блок сравнения и блок программ ко входам регулятора комбайна, при этом второй выход устройства порода-уголь подключен ко второму входу блока сравнения.
Источники информации, принятые во внимание при экспертизе
- 10
х1
/г
11
//
