(54) .СПОСОБ ИЗМЕРЕНИЯ ПЕРЕМЕЩЕНИЙ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ
| название | год | авторы | номер документа |
|---|---|---|---|
| Измерительный преобразователь перемещения | 1983 |
|
SU1089395A1 |
| Устройство для измерения перемещений | 1991 |
|
SU1816962A1 |
| Измерительный преобразователь постоянного тока | 1982 |
|
SU1150566A1 |
| Устройство для измерения перемещений | 1990 |
|
SU1737259A1 |
| Способ преобразования перемещений и устройство для его осуществления | 1983 |
|
SU1146540A1 |
| Преобразователь перемещений | 1987 |
|
SU1441175A1 |
| Трансформаторный датчик перемещений | 1990 |
|
SU1725068A1 |
| Преобразователь перемещений | 1989 |
|
SU1670362A1 |
| ЭЛЕКТРОМАГНИТНЫЙ РАСХОДОМЕР | 1992 |
|
RU2030713C1 |
| Измерительный преобразователь постоянного тока | 1989 |
|
SU1647439A1 |
I
Изобретение относится к контрольно-измерительной технике и может быть использовано для измерения перемещений подвижных объектов.
Известен способ измерения перемещений с помощью индуктивных датчиков, содержащих две измерительные обмотки, включенные последовательно и запитанные от стабилизированного источника питания переменного тока. В ходе измерений сравни- вают падения напряжения на этих обмотках и по их разности судят о контрол.ируемом перемещении IJ..
Недостаток такого способа измерений - нелинейность и невозможность задания нулевой точки отсчета, так как обе обмотки датчика являются измерительными.
Наиболее близок по технической сущности к предлагаемому способу измерения перемещений с помощью индуктивного датчика, содержащего последовательно соединенные измерительную и компенсационную обмотки, подключенные к источнику питания переменного тока датчика, заключающийся в том, что сравнивают падения напряжения на измерительной и компенсационной обмотках и по их разности судят о контролируемом перемещении 2).
Для осуществления этого способа исполь зуется устройство для измерения перемещений, содержащее индуктивный датчик с последовательно соединенными измерительной и компенсационной обмотками и подключенные к этим обмоткам источник пиS тания переменного тока датчика и алгебраический сумматор. В алгебраическом сумматоре осуществляется сравнение (вычитание) падений напряжений на измеоительной и компенсационной обмотках. Выходной сигнал регистрируется с помощью от10 счетного блока, подключенного к алгебраическому сумматору (3).
Недостаток способа и реализующего его
устройства дл.я измерения перемещений -
значительная нелинейность выходной зави симрсти, связывающей указаиную разность
tS напряжений и перемещений. .
Цель изобретения - повышение линейности.
Поставленная цель достигается тем, что стабилизируют падение напряжения на измерительной обмотке путем изменения напряжения источника питания переменного тока датчика, а устройство для измерения перемещений снабжено цепью обратной связи, включенной между измерительной обмоткой и источником питания переменного тока датчика и состоящей из блока сравнения и подключенного к одному из его входов источника опорного иапряжеиия, источ-, ник питаиия переменного тока датчика выполнен регулируемым d включает в себя генератор и управляемый усилитель.
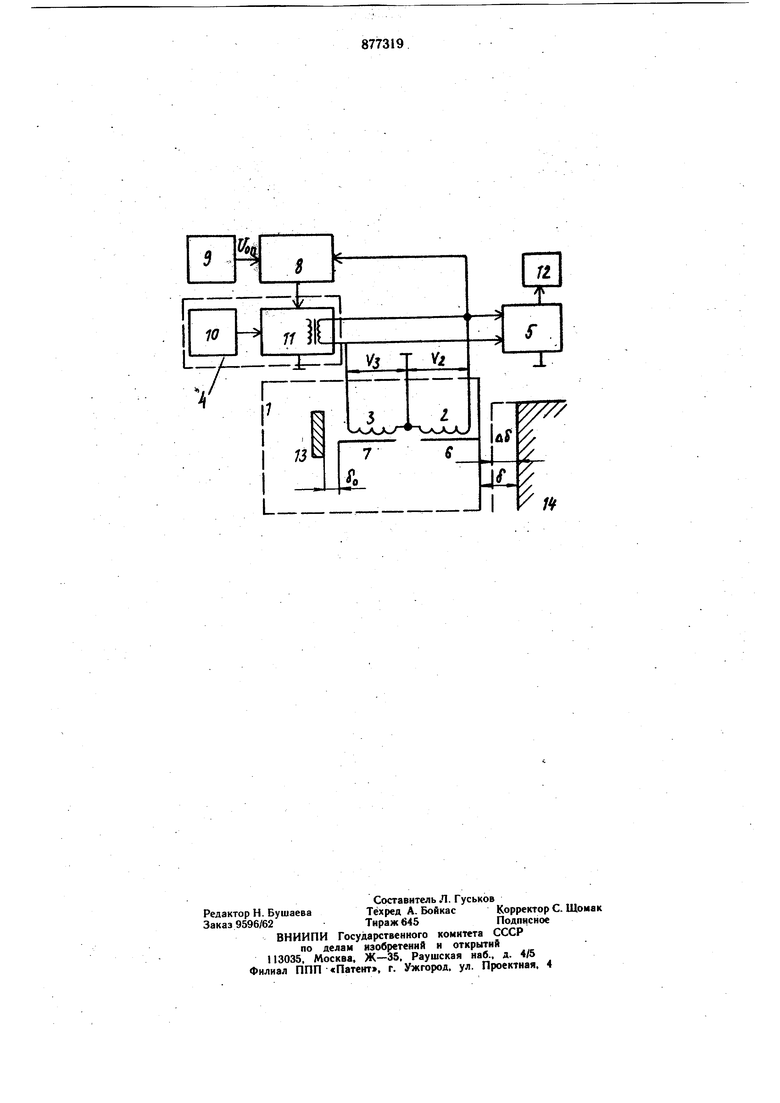
На чертеже изображено устройство для измерения перемещений, реализующее предлагаемый способ.
Устройство содержит индуктивный датчик 1, последовательно соединенные измерительиая обмотка 2 и компеисациониая обмотка 3 которого подключены к источнику 4 питания переменного тока датчика. Потенциальные концы обмоток 2 и 3 подсоединены к алгебраическому сумматору 5, в котором происходит сравнение (вычитание) падений напряжений на измерительной обмотке -2 и компенсационной обмотке 3. Рбмотки 2 и 3 размещены на магнитопроводах 6 и 7. Между измерительиой обмоткой 2 и источником 4 питания переменного тока датчика включена цепь обратной связи, содержащая блок 8 сравнения и источник 9 опорного напряжения. Источник 4 питаиия переменного тока датчика включает в себя генератор 10 переменного тока и управляемый усилитель П. К выходу алгебраического сумматора 5 подключен отсчетный блок 12. Нулевая точка отсчета устройства для изменения перемещеиий задается с помощью магнитного шунта 13, отделенного зазором S от магнитопровода 7. Ферромагиитиый объект 14, положение которого контролируется, расположен со стороны магнитопровода 6 и отделен от него переменным воздушным зазором SСпособ реализуется с помощью предлагаемого устройства следующим образом.
От источника 4 переменного тока датчика на последовательно включенные обмотки 2 и 3 подают напряжение питания. С помощью блока 8 сравнения падение напряжения на измерительной обмотке 2 сравнивают с величиной опорного напряжеиия, поступающего от источника 9 опорного напряжения. При наличии разности между падением напряжения на обмотке 2 и напряжением от источника 9 опорного напряйсеиия эта разность напряжений, поступая иа управляемый усилитель II, вызывает изме неиие напряжения иа выходе регулируемого источника 4 питаиия перемеииого тока датчика таким образом, чтобы падение напряжения на обмотке 2 поддерживалось неизменным (стабилизировалось по амплитуде) в зависимости от величины Von на выходе источника 9 опорного напряжения. Поскольку магнитным сопротивлением магннтопроводов б И 7 можно пренебречь по сравнению с магнитным сопротивлением воздушных зазоров So и S , то падения напряжений на измерительной обмЬтке 2 и компенсационной обмотке 3 определяются соотношениямиАа..1 . ,; Ai-I
J
где А и AJ - постоянные коэффициенты,
учитывающие физические и конструктивиые элементы измерительной и компенсационной частей датчика.
I - ток, протекающий через последова,тельно включенные обмотки 2 и 3. Отсюда следует, что д.-л
. иг-и, .е. напряжение Ц на компенсационной обмотке 3 оказывается пропорционально связанным (при постоянстве напряжения Uz на измерительной обмотке 2) от перемещения подвижного объекта 14 (т.е. от величины переменного, воздушного зазора S).
Применение предлагаемого способа позволяет обеспечить линейность выходной характеристики устройства для измерения перемещений в широком диапазоне перемещений коистролируемого объекта.
Формула изобретения
последовательно соединенные измерительную и компенсационную обмотки, подключенные к источнику питання переменного тока датчика, заключающийся в том, что сравннвают падения напряжения на измерительной и компенсационной обмотках и по их разности суд;1т о контролируемом перемещении, отличающийся тем, что, с целью повышения линейности, стабилизируют падение напряжения на нзмернтельной обмотке путем изменения напряжения источника
питания переменного тока датчика.
Источиики информации,
принятые во внимание при экспертизе 1. Федотов А. В. Расчет и проектирование индуктивных измерительных устройств. М., «Мащиностроение, 1979, с. 133.
