(54) СПОСОБКОНТРОЛЯ НЕРОВНОСТЕЙ ПОВЕРХНОСТИ
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОЦЕНКИ ШЕРОХОВАТОСТИ ПОВЕРХНОСТИ ДЕТАЛИ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2012 |
|
RU2541730C2 |
| Способ определения неровностей профиля поверхности | 1981 |
|
SU968621A1 |
| Способ оценки параметров профиля поверхности на основе вероятностно-статистической классификации спектра профилограммы | 2019 |
|
RU2708500C1 |
| Ультразвуковой способ обнаружения дефектов в головке рельса | 2022 |
|
RU2783753C1 |
| Способ контроля качества поверхностижЕлОбА КОлЕц пОдшипНиКОВ КАчЕНия | 1979 |
|
SU827975A1 |
| Способ контроля качества сборки подшипников качения | 1981 |
|
SU996903A1 |
| СПОСОБ ДИАГНОСТИКИ ПОДШИПНИКОВ КАЧЕНИЯ | 2002 |
|
RU2239809C2 |
| Способ контроля структурной неоднородности поверхностного слоя детали | 1990 |
|
SU1730574A1 |
| СПОСОБ ДЛЯ КОНТРОЛЯ КАЧЕСТВА УЗЛОВ ТРЕНИЯ | 2006 |
|
RU2344415C2 |
| СПОСОБ ДИАГНОСТИКИ ПОДШИПНИКОВ КАЧЕНИЯ БУКС ПОДВИЖНОГО СОСТАВА ЖЕЛЕЗНОДОРОЖНОГО ТРАНСПОРТА И МЕТРОПОЛИТЕНА | 2009 |
|
RU2411150C1 |
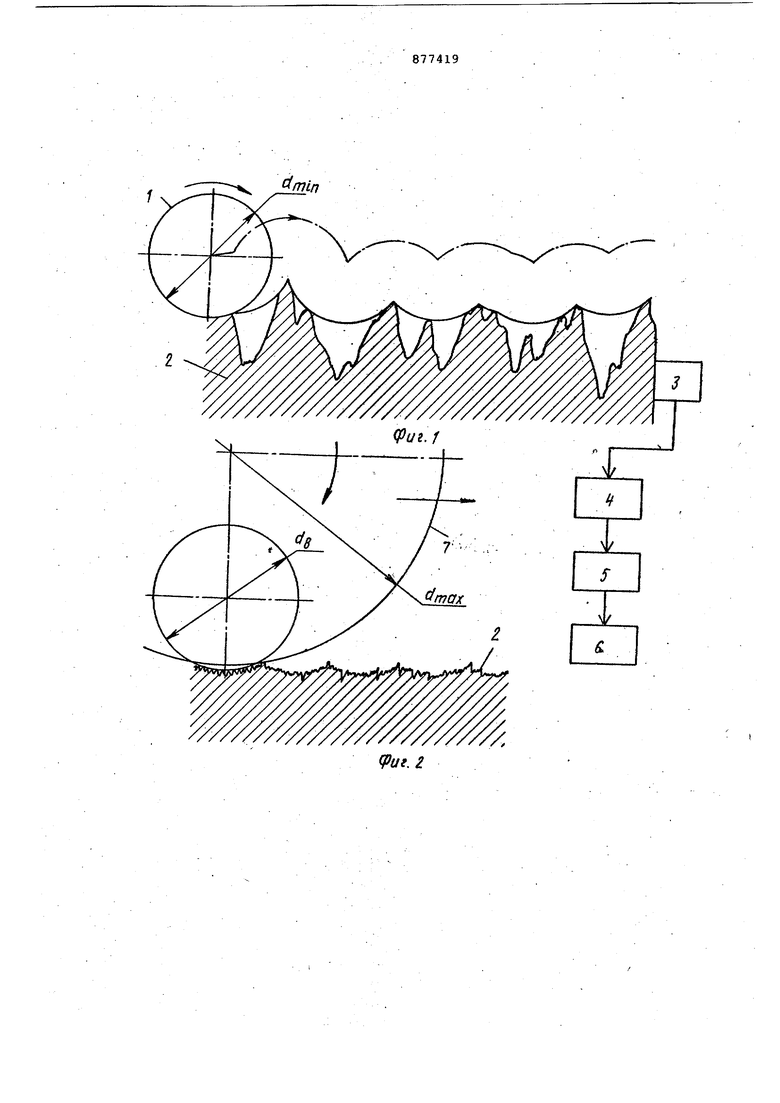
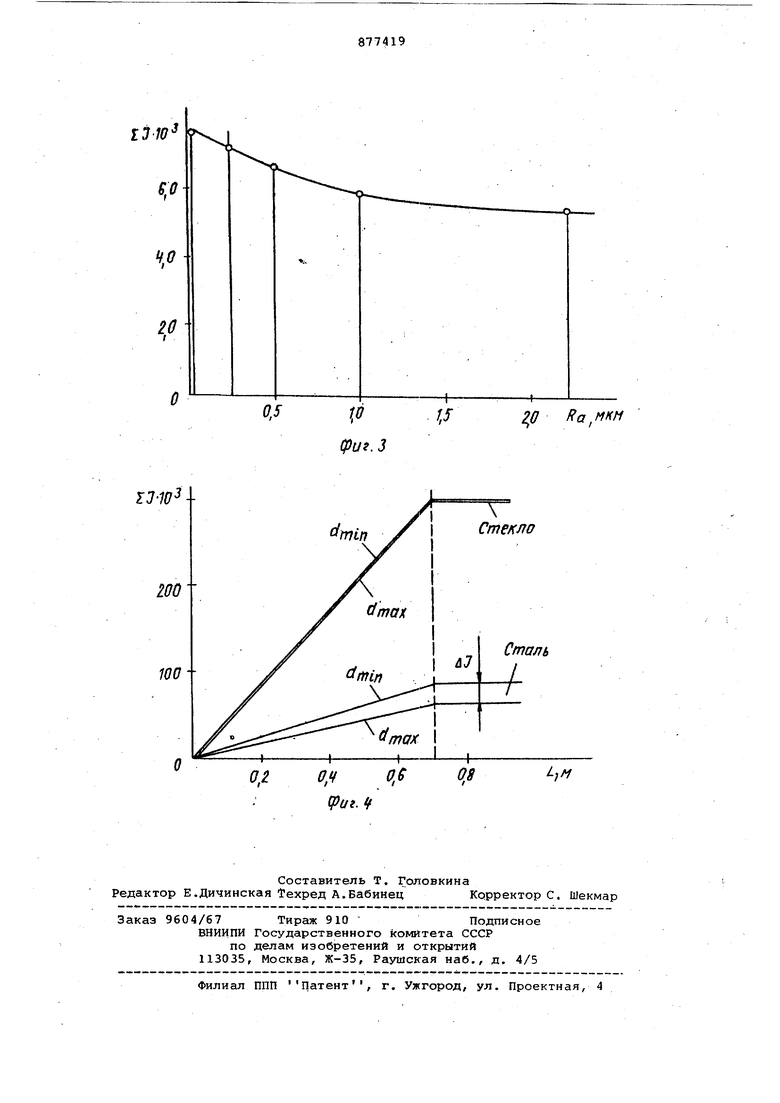
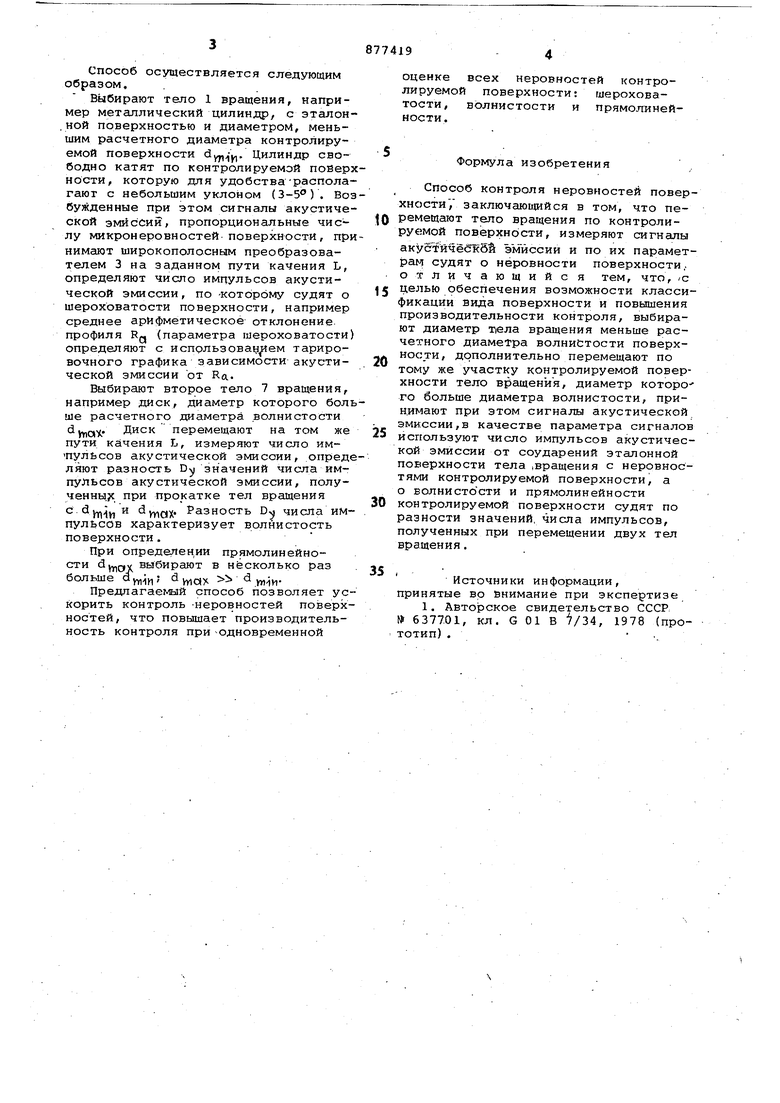
Изобретение относится к кон рольно-иэмерительной технике и может быт использовано для контроля шероховатости, волнистости и прямолинейности изделий.. Известен способ контроля неровнос тей поверхности, заключающийся в том что перемещаю-т тело вращения по конт ролируемой поверхности, измеряют сиг налы акустической эмиссии и по их па раметрам судят о неровности поверх- нести l3 Недостатком этого способа являетс невозможность классификации вида поверхности, т. е. определения шероховатости, волнистости и прямолинейности, и низкая производительность контроля. Цель изобретения - обеспечение возможности классификации вида повер ности и повышение производительности контроля. Поставленная цель достигается тем что выбирают диаметр тела вращения Меньше расчетного диаметра водниртости поверхности, дополнительно перемещают по этому же участку контролируемой поверхности тело вращения, диаметр которого больше расчетного диаметра волнистости, принимают при этом сигналы акустической эмиссии, в качестве параметра сигналов используют число импульсов акустической эмиссии от соударений эталонной поверхности тепа вращения с неровностями контролируемой поверхности, а о волнистости и прямолинейности контролируемой поверхности судят по разности значений числа импульсов, полученных при перемещении двух тел вращения. На.фиг. 1 и 2 приведены схемы реализации способа при перемещении двух тел вращения; на фиг. 3 и 4 соответственно графики зависимости числа импульсов акустической эмиссии от параметра шероховатости R, и от пути качения L. Схема содержит тело 1 вращения, диаметр которого меньше расчетного диаметра волнистости поверхности, профиль 2 шероховатости контролируемой поверхности, соединенные последовательно широкополосный преобразователь 3, предусилитель 4, счетчик 5 числа импульсов акустической эмиссии и регистрирующий прибор 6, и второе тело 7 вращения, диаметр которого больше расчетного диаметра волнистости. Способ осуществляется следующим образом. Выбирают тело 1 вращения, например металлический цилиндр, с эталон. ной поверхностью и диаметром, меньшим расчетного диаметра контролируемой поверхности Цилиндр свободно катят по контролируемой поверх ности, которую для удобства-располагают с небольшим уклоном (3-5). Воз бужденные при этом сигналы акустической эмиссий, пропорциональные чис лу микронеровностей поверхности, при нимгиот широкополосным преобразователем 3 на заданном пути качения L, определяют число импульсов акустической эмиссии, по -которому судят о шероховатости поверхности, например среднее арифметическое отклонение профиля Rg (параметра шероховатости) определяют с использовау 1ем тарировочного графика зависимости акустической эмиссии от Ra. Выбирают второе тело 7 вращения, например диск, диаметр которого бол ше расчетного диаметра волнистости .). Диск перемещают на том же пути качения Ь, измеряют число импульсов акустической эмиссии, опред ляют разность D значений числа импульсов акустической эмиссии, полученны.}С при прокатке тел вращения Разность числа импульсов характеризует волнистость поверхности . При определении прямолинейности 3уу,(5« выбирают в несколько раз больше di Предлагаемый способ позволяет ус корить контроль -неровностей поверхностей, что повышает производительность контроля при одновременной оценке всех неровностей контролируемой поверхности: шероховатости, волнистости и прямолинейности. Формула изобретения Способ контроля неровностей поверхности, заключгиощийся в том, что перемещают тело вращения по контролиру€ мой поверхности, измеряют сигналы акус йчёбКЗй эмиссии и по их параметрам судят о неровности поверхности,, отличающийс я тем, что, /с целью обеспечения возможности классификации вида поверхности и повышения производительности контроля, выбирают диаметр Т|ела вращения меньше расчетного диаметра волнистости поверхности, дополнительно перемещают по тому же участку контролируемой поверхности тело вращения, диаметр которо го больше диаметра волнистости, принимают при этом сигналы акустической эмиссии,в качестве параметра сигналов используют число импульсов акустической эмиссии от соударений эталонной поверхности тела .вращения с неровностями контролируемой поверхности, а о волнистости и прямолинейности контролируемой поверхности судят по разности значений, числа импульсов, полученных при перемещении двух тел вращения. Источники информации, принятые во Внимание при экспертизе 1. Авторское свидетельство СССР; № 637701, кл. G 01 В V34, 1978 (прототип) . ..
fPuf.l
IJ-W
0.5
10 фиг.З
13-10 J,f
2р Ra ,мкн
т
100
