Изобретение относится к акустическому виду неразрушающего контроля и может быть использовано при контроле локальных участков железнодорожных рельсов по показаниям мобильных и съемных средств дефектоскопии, при периодическом осмотре рельсовых путей.
В процессе эксплуатации рельсового пути головка рельсов претерпевает значительные нагрузки. Именно здесь развивается до 70% от всех обнаруживаемых поверхностных и внутренних дефектов. На поверхности катания головки могут образоваться микротрещины и неровности, являющиеся источниками развития опасных продольных и поперечных трещин. Действующей нормативной документацией [1,2] поперечные трещины (кодов 21, 24, 26 и др.) в головке относят к наиболее опасным дефектам, которые могут привести к внезапному хрупкому излому рельса под движущимся подвижным составом. В то же время продольные трещины и расслоения (кодов 10, 11.1-2, 14 по [2]) на глубине до 8 мм от поверхности катания, как правило, развиваются длительный период и могут быть устранены в плановом порядке.
На всех железных дорогах наиболее опасными и трудно выявляемыми дефектами являются поперечные трещины головки, развивающиеся от/под продольными расслоениями (трещины кодов 30.1-2). Как правило, продольные расслоения часто имеют весьма большую протяженность (до 300 мм) и, экранируя УЗ колебания, вводимые с поверхности катания, препятствуют озвучиванию поперечной трещины. На многих железных дорогах периодически происходят резонансные изломы рельсов под поездами именно из-за таких дефектов, пропущенных при штатной дефектоскопии рельсов. Весьма часто в окрестностях таких дефектов наблюдаются и поверхностные повреждения в виде выкрашиваний, смятий и локальных износов поверхности катания (коды дефектов 11, 14, 46.3 и др. по [2]), допустимые параметры которых регламентированы и требуют периодических измерений. Поэтому задача обнаружения таких сложных внутренних дефектов неразрушающими способами контроля с одновременной оценкой и параметров поверхностных повреждений головки рельсов является актуальной.
Учитывая актуальность вопросов обнаружения внутренних дефектов и состояния поверхности катания головки рельсов, предложено несколько технических решений, базирующихся на использовании ультразвуковых (УЗ) колебаний. Недостатками известных технических решений [3-7], является низкая точность и сложность проведения процедуры измерений. В основном это вызвано использованием поверхности катания рельсов в качестве плоскости ввода УЗ колебаний. При этом эхо-сигналы от многих трещин, залегающих вблизи поверхности катания головки рельса, попадают в зону нечувствительности («мертвую зону») УЗ контроля. Предложенные способы обнаружения внутренних дефектов головки рельсов путем ввода/приема УЗ колебаний с боковых поверхностей головки рельса [8-10] также не всегда применимы, так как боковая поверхность головки со стороны рабочей грани в процессе эксплуатации подвергается значительному износу (более 10 мм) и становится не пригодным для ввода и приема УЗ колебаний.
Возможными поверхностями ввода УЗ колебаний могли бы стать подголовочные поверхности («нижние грани» - по ГОСТ Р 50542-93) головки рельса, которые не подвергаются воздействию колес подвижного состава и сохраняют свой первоначальный профиль практически в течение всего жизненного цикла эксплуатации рельсов в пути. Главной причиной игнорирования стабильных (неизнашиваемых) нижних граней головки рельсов для ввода/приема УЗ колебаний с целью обнаружения внутренних дефектов известными техническими решениями, является сложность обеспечения стабильного акустического контакта при перемещении (сканировании) путем скольжения электроакустических преобразователей (ЭАП) по необработанным по поверхностям рельсового проката.
Наиболее близким техническим решением, принятым за прототип, является ультразвуковой способ обнаружения дефектов в головке рельса [11], в том числе и под продольными расслоениями, заключающийся в установке в окрестности предполагаемого дефекта на нижние грани головки рельса наклонные электроакустические преобразователи, синхронном перемещении их по указанным поверхностям, зондировании головки рельса, для чего преобразователем с одной нижней грани излучают ультразвуковые сигналы, принимают отраженные от плоскости дефекта эхо-сигналы преобразователем на другой нижней грани головки рельса, анализе их и определении наличия дефекта в головке рельса.
Недостатками известного технического решения являются низкая достоверность и надежность контроля, вызванная с нестабильностью акустического контакта при перемещении ЭАП по необработанным поверхностям нижних граней головки рельса, а также ограниченная область применения.
Задачей, на решение которой направлено заявляемое изобретение, является создание способа обнаружения поперечных трещин в головке рельсов, в том числе залегающих под продольно ориентированными горизонтально-наклонными трещинами и одновременного измерения параметров локальных повреждений поверхности катания головки рельса ультразвуковым способом.
Технический результат изобретения заключается в повышении надежности и достоверности обнаружения указанных дефектов, и в расширении области применения способа контроля головки рельсов.
Технический результат обеспечивается тем, что в ультразвуковом способе обнаружения дефекта в головке рельсов, заключающемся в том, что в окрестности предполагаемого дефекта на нижние грани головки рельса устанавливают наклонные электроакустические преобразователи, синхронно перемещают их по указанным поверхностям, зондируют головку рельса, для чего преобразователем с одной нижней грани излучают ультразвуковые сигналы и принимают их преобразователем на другой нижней грани головки рельса, фиксируют отраженные от плоскости дефекта эхо-сигналы, анализируют их и определяют наличие дефекта в головке рельса, причем возбуждение и прием ультразвуковых колебаний проводят линейками пьезопластин, размещенными поперек головки рельса в роликовых преобразователях с упругой оболочкой, дополнительно на поверхность катания головки рельса размещают роликовый преобразователь с пьезопластинами, сонаправленными с пьезопластинами на нижних гранях головки рельса и перемещают его синхронно с преобразователями на нижних гранях, количество пьезопластин в линейках выбирают исходя из требуемой разрешающей способности и полноты озвучивания дефекта, границы продольной трещины определяют теневым методом, а параметры локальных неровностей поверхности катания - по времени пробега ультразвуковых колебаний от нижней грани до поверхности катания.
Существенными отличиями заявляемого способа являются:
1. Осуществление ввода и приема УЗ колебаний в металл головки рельса с помощью пьезопластин, размещенных в роликовых преобразователях, обеспечивает более надежный и стабильный акустический контакт, особенно по поверхностям нижних граней головки рельса. При озвучивании предлагаемыми системами качения (роликами) обеспечивается стабильный и качественный акустический контакт как на необработанных (неровных) поверхностях нижних граней, так и на поверхности катания, где, как правило, в зоне локальных внутренних дефектов могут наблюдаться и поверхностные. В прототипе [11] сканирование с помощью систем скольжения преобразователей по неровным, шероховатым поверхностям нижней грани головки рельса неизбежно приводит к заметной флуктуации, как сквозных сигналов на бездефектных участках головки рельса, так и амплитуд эхо-сигналов от возможных дефектов. А при применении преобразователей с фазированными решеткам (ФАР) незначительное нарушение акустического контакта, даже под частью преобразователя, приводит к нарушению законов обработки сигналов ФАР и резко (вплоть до невозможности контроля) снижает надежность и достоверность контроля.
2. Наличие на поверхности катания приемного роликового преобразователя с акустической линейкой с сонаправленными на нижние ролики пьезопластинами, в отличие от прототипа, позволяет:
- обеспечить контроль акустического контакта всех, реализуемых предлагаемый способ, ЭАП в процессе синхронного движения роликов вдоль головки рельса;
- определить протяженность по длине рельса размеры продольных трещин теневым способом;
- определить глубину локальных неровностей поверхности катания путем измерения времен распространения УЗ колебаний от излучателей (на нижних гранях) до приемников (на поверхности катания).
В прототипе не предусмотрены операции по проверке наличия акустического контакта, измерения протяженности продольной трещины (теневым методом УЗ контроля) и глубин локальных неровностей на поверхности катания.
3. Излучение и прием УЗ колебаний с помощью акустических линеек со множеством пьезопластин последовательно или одновременно позволяет осуществлять озвучивание сечения головки гораздо быстрее, чем в прототипе формирование эхо-сигналов с помощью ФАР путем секторного сканирования и качания УЗ луча в пределах головки. Тем самым обеспечивается увеличение производительность контроля дефектного сечения.
4. Применение роликовых преобразователей, как показывает практика, требует на 30-50% меньше контактной смазки, чем при применении систем скольжения. Этот фактор особенно важен при контроле локальных участков рельсового пути по показаниям мобильных и съемных средств дефектоскопии, т.к. их проверяют в основном вручную и требуемый объем смазки входит в переносной комплект дефектоскописта. В прототипе вопросы обеспечения акустического контакта между ЭАП с ФАР и поверхностями нижних граней головки рельса не рассматриваются, что вызывает сомнение в осуществимости известного способа.
Реализацию предлагаемого способа иллюстрируют следующие графические материалы:
Фиг.1 - Размещение роликовых преобразователей (в трех видах: а - поперек сечения, b - в продольном сечении и с - вид сверху на головку рельса) и схема прозвучивания головки рельса на контролируемом рельсе, где:
1 - головка контролируемого рельса;
2 и 3 - нижние грани (подголовочные поверхности) и поверхность катания головки рельса соответственно;
4L и 4R - каретки с роликовыми преобразователями ML и MR на правой (Right) и левой (Left) нижних гранях головки рельса;
5 - каретка с роликовым преобразователем М' на поверхности катания головки рельса;
6 - пьезопластины внутри роликовых преобразователей;
γ и β - углы ввода/приема УЗ колебаний в плоскости зондирования и в горизонтальной плоскости, соответственно;
DL и DT - продольная и поперечная трещина внутри головки рельса соответственно.
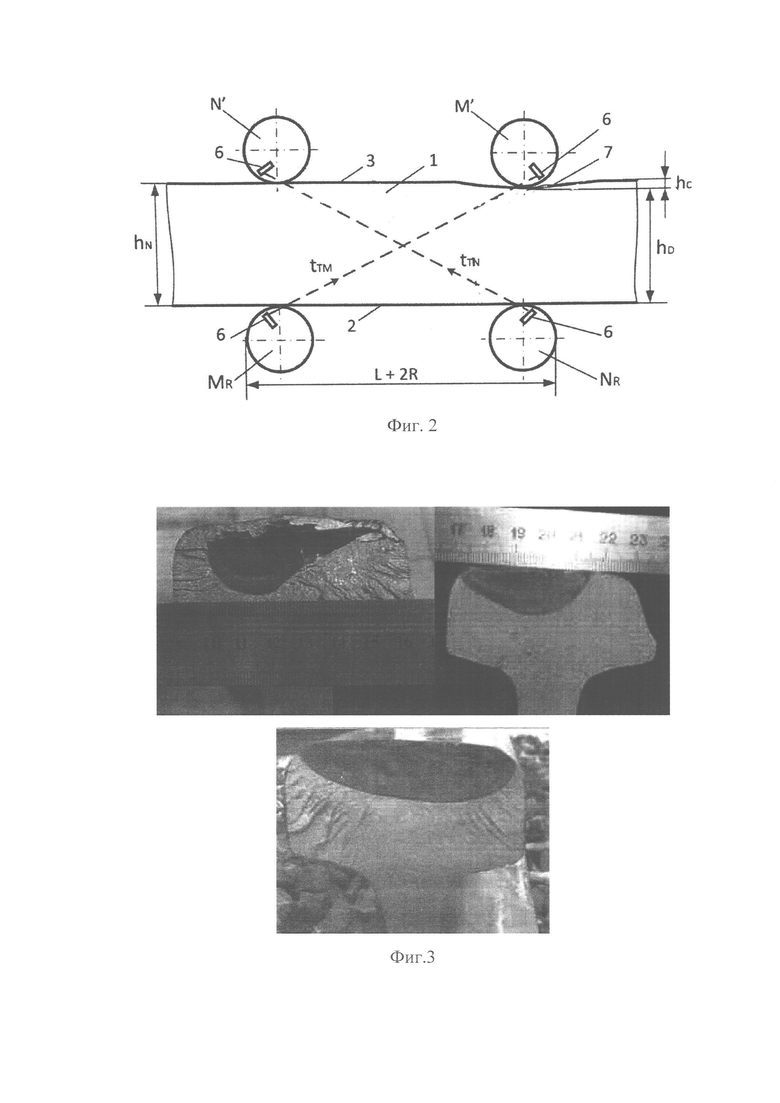
Фиг. 2 - Реализация двунаправленной системы обнаружения внутренних дефектов предлагаемым способом с одновременной оценкой параметров поверхностных повреждений, где:
7 - поверхностное повреждение (смятие) головки рельса глубиной hc;
NR и NL- роликовые преобразователи на нижних гранях 2 головки, обеспечивающие ввод/прием УЗ колебаний в противоположном направлении вдоль рельса, чем роликовые преобразователи ML и MR;
N' - роликовый преобразователь на поверхности катания головки рельса с пьезопластинами 6, сонаправленными с пластинами 6 в роликах NR и NL;
2R - диаметры роликов (в общем случае у разных роликов могут быть разные диаметры);
L - расстояние между осями роликовых преобразователей, размещенных на нижних гранях и на поверхности катания рельса;
tTM и tTN - времена распространения сквозных УЗ импульсов с нижних граней по наклонной траектории до сонаправленных пьезопластин, размещенных на поверхности катания (времена t условно показаны на траекториях УЗ лучей);
hN - номинальная высота головки рельса в анализируемом сечении на бездефектном участке рельса;
hD - высота головки рельса в анализируемом сечении в зоне поверхностного дефектного участка.
Фиг. 3 - Фото некоторых реальных дефектов в головке рельса, которые из-за пропуска действующими средствам дефектоскопии привели к изломам рельсов и подлежат к обнаружению заявляемым способом.
Предлагаемый способ реализуется следующим образом. В зоне предполагаемого внутреннего дефекта на поверхность катания 3 и на нижние грани 2 головки 1 рельса устанавливают каретки 4L, 4R и 5 с роликовыми преобразователями ML, MR и М' соответственно, которые в общем случае могут быть объединены в единую конструкцию в виде тележки (на фиг. не показана). При этом контролируемый рельс выступает своеобразной направляющей для кареток.
Роликовые преобразователи известны из уровня техники [12-16] и представляют собой вращающиеся на оси ролики (колеса малого размера), имеющие оболочку в виде эластичной мембраны и наполненные звукопроводящей жидкостью. Внутри ролика на оси его вращения закреплены электроакустические преобразователи (в данном случае линейка с пьезопластинами 6) для ввода/приема УЗ колебаний в рельс (и из рельса) через пятно контакта эластичной мембраны ролика с поверхностью рельса.
Ширина роликов ML и MR согласована с размером нижних граней (прямолинейным участком подголовочной поверхности) (фиг. 1). Внутри ролика размещено i пьезопластин 6, осуществляющих ввод УЗ колебаний наклонно под соответствующими углами γ и β (см. фиг. 1b и с). Указанные углы определяются расчетным путем из соображений, чтобы УЗ лучи, излучаемые из центральных пластин акустических линеек нижних роликов ML и MR, пересекались на продольной оси (на центральной вертикальной плоскости) рельса на глубине 8-10 мм от поверхности катания - в зоне наиболее частого формирования (зарождения) поперечных трещин DT головки, в том числе и под продольными расслоениями DL. При этом, благодаря диаграмме направленности пьезопластин, в зону воздействия УЗ лучей попадают как трещины, развивающиеся непосредственно от поверхности катания 3, так и залегающие на больших, чем указано выше (чем 8-10 мм) глубинах в головке 1 рельсов.
С одной стороны, угол β должен быть максимально большим с тем, чтобы УЗ луч падал на плоскость поперечной трещины под углом, близким к 90°. С другой стороны - угол β ограничивается сверху углом около 70°, с тем чтобы обеспечивать эффективное излучение (прием) поперечных УЗ колебаний. На практике угол β может иметь значение в пределах 50-70°. После выбора угла β из геометрических построений, исходя из размеров и конфигурации профиля головки рельса (фиг. 1b и 1с), определяется угол у.
Количество i пьезопластин 6 в каждом нижнем ролике определяется размером поверхности нижних граней в поперечном сечении и размером (диаметром) пьезопластин, выбираемых из требуемой разрешающей способности при оценке дефектного сечения. Например, при использовании типовых пластин диаметром 4 мм, в каждом нижнем ролике можно разместить по 5 пьезопластин (i=5).
Верхняя каретка 5 с роликовым преобразователем М' содержит линейку с пьезопластинами 6, направленными на соответствующие пластины нижних подголовочных роликов в каретках 4L и 4R, и содержит не менее N≥2i пьезопластин (фиг. 1а и с), (для приведенного выше примера - 10 пластин). На бездефектных участках стабильный уровень амплитуд сквозных сигналов на пьезопластинах преобразователя М', свидетельствует о стабильных акустических контактах между соответствующими поверхностями контролируемого рельса и всеми роликовыми преобразователями.
Обнаружение внутреннего дефекта и определение его образа (продольная DL, или поперечная трещина DT) происходит следующим образом. В соответствии с фиг. 1, излученные пьезопластинами n1-ni, ролика MR УЗ колебания проходят через металл головки 1 рельса и принимаются сонаправленными пьезопластинами n'1-n'i в ролике М' на поверхности катания рельса (фиг. 1с). Что свидетельствует об отсутствии внутренних дефектов головки рельса на пути (траектории) распространения УЗ колебаний. Аналогично, в следующем такте (или одновременно), происходит зондирование другой части головки с помощью УЗ колебаний, распространяющихся от пьезопластин ролика ML к сонаправленным пластинам в ролике М'.
При наличии продольно ориентированной горизонтально-наклонной трещины DL в головке 1 рельса происходит уменьшение амплитуд (вплоть до нулевого уровня) сквозных (проходящих с нижних граней 2 на поверхность катания 3 рельса) УЗ сигналов.
В более сложных ситуациях, когда под продольной трещиной DL появляется поперечная трещина DT, излученные УЗ колебания с одной грани головки рельса переотражаясь от плоскости (или от уголкового отражателя) трещины попадают на пластины 6 ролика, находящегося на другой нижней грани головки рельса. На фиг. 1с показан вариант, кода излученные пьезопластинами 6 ролика MR УЗ колебания, попадая на плоскость поперечной трещины DT, отражаются и принимаются пластинами 6 в ролике ML. Эффект отражения УЗ сигналов многократно возрастает, если продольная и поперечные трещины образуют т.н. «уголковый отражатель». Как известно в любой локации (радио, гидро, акустической …), в том числе и ультразвуковой, уголковый отражатель (фиг. 1b) является хорошим отражателем, формирующим мощный отраженный сигнал, что повышает надежность обнаружения поперечной трещины под продольными расслоениями (дефектами).
Таким образом, при наличии внутри головки рельса сложного дефекта, являющегося сочетанием продольной DL и поперечной DT трещин на пьезопластинах ролика М', находящегося на поверхности катания уменьшаются (до нулевого уровня) амплитуды сквозных сигналов и, практически одновременно, появляются эхо-сигналы на пьезопластинах 6 в ролике ML (при совмещенных режимах (см. ниже) работы пьезопластин, и в ролике MR) на нижних гранях головки рельса. Поперечные размеры трещины можно определить по количеству среагировавших на дефект пьезопластин, а продольный - по длительности уменьшения (отсутствия) сквозного сигнала при перемещении системы (тележки с датчиком пути) вдоль рельса.
Благодаря тому, что озвучивание сечения головки рельса акустическими линейками, содержащими до i пьезопластин (n1-ni) с обеих сторон головки 1, производится послойное (в вертикально-наклонных плоскостях зондирования) прозвучивание почти полного сечения головки рельса, обеспечивается обнаружение внутренних дефектов, представляющих угрозу движения поездов.
Специалисту в области дефектоскопии понятно из уровня техники, что режимы работы пьезопластин в рассматриваемых роликах могут быть разными: например, пьезопластины 6 в ролике MR излучают импульсные УЗ колебания, а пластины 6 в ролике М' на поверхности катания рельса, принимаю сквозные импульсы при отсутствии внутренних дефектов. При наличии поперечной трещины DT, УЗ импульсы отражаются от плоскости трещины и принимаются пластинами 6 в ролике ML. Возможен вариант, кода излучают пластины в ролике ML, а принимают пластины в роликах MR и М'. И наконец, возможен вариант, кода пластины во всех роликах работают в совмещенном режиме (в режиме излучения и приема УЗ колебаний). В последнем случае несколько усложняется последующая обработка принятых сигналов и интерпретация результатов.
Очередность работы пьезопластин в акустических линейках предпочтительно последовательная: каждая сонаправленная пара пластин работает последовательно, что позволяет избежать взаимовлияния излучений соседних пластин и так же упрощает анализ сигналов. Т.е. возможно электронным способом перемещать УЗ лучи попрек головки рельса для получения границ дефекта по ширине. При этом суммарное время цикла работы всех пластин (в рассмотренном примере до 10 шт. ) не превышает 800 мкс, что соответствует частоте следования циклов излучения/приема УЗ колебаний около 1200 Гц и не является ограничивающим для скорости движения системы роликов вдоль рельса при ручном и механизированном контроле. В общем случае возможна и одновременная работа всех пьезопластин в роликах с соответствующим усложнением последующей обработки сигналов.
Реализация заявляемого способа возможна при любых сочетаниях режимов излучения/приема УЗ колебаний и последовательности работы пьезопластин в роликовых преобразователях.
Для синхронного перемещения по головке рельса каретки 4R, 4L и 5 с роликовыми преобразователями могут быть объединены в несущую тележку, на которой могут быть расположены известные датчик перемещения (одометр), электронный блок дефектоскопа и емкость для контактирующей смазки (на фиг. не показаны). Прижатие роликов к сканируемым поверхностям и обеспечение стабильного акустического контакта путем подачи контактирующей смазки (или геля для УЗ контроля) на сканируемые поверхности осуществляется системами прижатия, также размещенными на тележке.
В общем случае обнаружение множества поперечных дефектов DT в головке 1 рельса может осуществлено и без использования верхнего роликового преобразователя М' (фиг. 1). Однако при этом обнаружение продольных трещин DL проблематично и оценка качества акустического контакта под всеми преобразователями в процессе сканирования так же невозможна, что резко снижает надежность и достоверность контроля. Таким образом только совокупность отличительных признаков способа обеспечивает достижение заявленного технического результата: повышении надежности и достоверности обнаружения внутренних, в том числе распространяющимися и под продольными трещинами, дефектов в головке рельсов.
Известно, что в процессе эксплуатации железнодорожных рельсов в головке формируются разнориентированные дефекты. Например, поперечные трещины DT контактно-усталостного характера (фиг. 1а), в зависимости от преимущественного направления движения поездов, могут иметь отклонения от вертикали до ±25° [17]. Поэтому с целью более надежного обнаружения наиболее вероятных дефектов в головке рельса целесообразно использовать рассмотренные выше принципы обнаружения дефектов с направлением УЗ колебаний с нижних граней в головку рельса по и против движения искательной системы. При этом можно сконфигурировать систему из 6 роликовых преобразователей, так, как показано на фиг. 2, без увеличения общих габаритных размеров L+2R по длине рельса. Здесь L расстояние между осями роликовых преобразователей, - 2R диаметры роликов.
Роликовые преобразователи NR и NL на нижних гранях 2 головки, и N' на поверхности катания 3 рельса с пьезопластинами 6 сконструированы идентично рассмотренной выше системе роликов М, но обеспечивают излучение/прием УЗ колебаний в противоположном направлении по длине рельса. На фиг. 2 показано положение роликовых преобразователей и траектории УЗ лучей только в одном сечении зондирования головки рельса, т.к. принципы озвучивания головки при данном направлении излучения аналогичны представленному на фиг.1.
Как отмечено выше, весьма часто в окрестности формирования внутренних дефектов в головке 1 рельсов наблюдаются повреждения (7 на фиг. 2) поверхности катания (смятия, отслоения, выкрашивания поверхностного слоя). Благодаря использованию роликовых преобразователей в основном удается сохранить акустический контакт на этих неровностях и обеспечить прозвучивание головки рельса. В тоже время параметры (протяженность, глубина hc) этих поверхностных повреждений периодически должны оцениваться с целью недопущения их развития выше критических размеров [1, 2].
Как видно из фиг. 2, оценку параметров поверхностных повреждений также можно выполнить с помощью предлагаемой системы УЗ контроля путем измерения времен tTM и tTN распространения сквозных сигналов с нижних граней по наклонной траектории до поверхности катания. С целью повышения точности измерений достаточно малых величин (например, предельно допустимая глубина hc смятия головки рельса не превышает 4,0 мм [2]), целесообразно выполнить определение глубины неровности поверхности катания не путем прямых измерений, а путем сравнения значений высоты hN головки рельса в анализируемых сечениях на бездефектном hN и дефектном hD участках по разности tc времен (фиг. 2):
tc = tTN-tTM.
При этом операции определения времен распространения УЗ колебаний в переходных слоях (в жидкости ролика, в толще оболочки ролика) можно исключить. Вычисления геометрических параметров высоты hN головки рельса и глубины неровности hc по измеренным временам распространения сквозных сигналов при известных углах ввода и скоростях распространения УЗ колебаний в металле головки рельса (для поперечных колебаний 3260 м/с) осуществляют известными способами [18].
Приведенные на фиг. 3 примеры дефектов головки рельсов не были обнаружены действующими средствами дефектоскопии, и как следует из изложенного, обнаруживаются предлагаемым способом.
Таким образом, применение предлагаемого способа позволяет повысить надежность и достоверность обнаружения внутренних дефектов головки рельса, в том числе и сложных поперечных трещин под продольными расслоениями за счет применения роликовых преобразователей с акустическими линейками. Одновременно способ увеличивает производительность контроля и имеет расширенную область применения (определение внутренних дефектов, оценка локальных повреждений поверхности катания, контроль акустического контакта под всеми преобразователями).
Источники информации
1. UIC Catalogue of Rail Defects - 2001 edition "Handbook of Rail Defects - UIC Code 712R". 2001. 108 p.
2. Инструкция "Дефекты рельсов. Классификация, каталог и параметры дефектных и остродефектных рельсов". ОАО "РЖД" № 2499р от 23.10.2014.
3. JP 11337529.
4. RU 2613574.
5. RU 2545493.
6. RU 2060493.
7. US 2013/0152691.
8. ЕР 2277037.
9. RU 2466386.
10. JP 2001183349
11. JP 2015243094 A
12. RU 89235.
13. RU 2677124.
14. US 5419196.
15. RU 2611709.
16. RU 2504767.
17. Шур E.A. Повреждения рельсов. - M.: Интекст, 2012. - 192 с.
18. Марков А.А., Кузнецова Е.А. Дефектоскопия рельсов. Формирование и анализ сигналов. Книга 1. Основы. Практическое пособие в двух книгах. С-Пб.: КультИнформПресс, 2010. 292 с.

Использование: для обнаружения дефектов в головке рельса. Сущность изобретения заключается в том, что в окрестности предполагаемого дефекта на нижние грани головки рельса устанавливают наклонные электроакустические преобразователи, синхронно перемещают их по указанным поверхностям, зондируют головку рельса, для чего преобразователем с одной нижней грани излучают ультразвуковые сигналы, принимают отраженные от плоскости дефекта эхо-сигналы преобразователем на другой нижней грани головки рельса, анализируют их и определяют наличие дефекта в головке рельса, при этом возбуждение и прием ультразвуковых колебаний проводят линейками пьезопластин, размещенными поперек головки рельса в роликовых преобразователях с упругой оболочкой, дополнительно на поверхность катания головки рельса размещают роликовый преобразователь с пьезопластинами, сонаправленными с пьезопластинами на нижних гранях головки рельса, и перемещают его синхронно с преобразователями на нижних гранях, количество пьезопластин в линейках выбирают исходя из требуемой разрешающей способности и полноты озвучивания дефекта, границы продольной трещины определяют теневым методом, а параметры локальных неровностей поверхности катания - по времени пробега ультразвуковых колебаний от нижней грани до поверхности катания. Технический результат: повышение надежности и достоверности обнаружения дефектов в головке рельсов. 3 ил.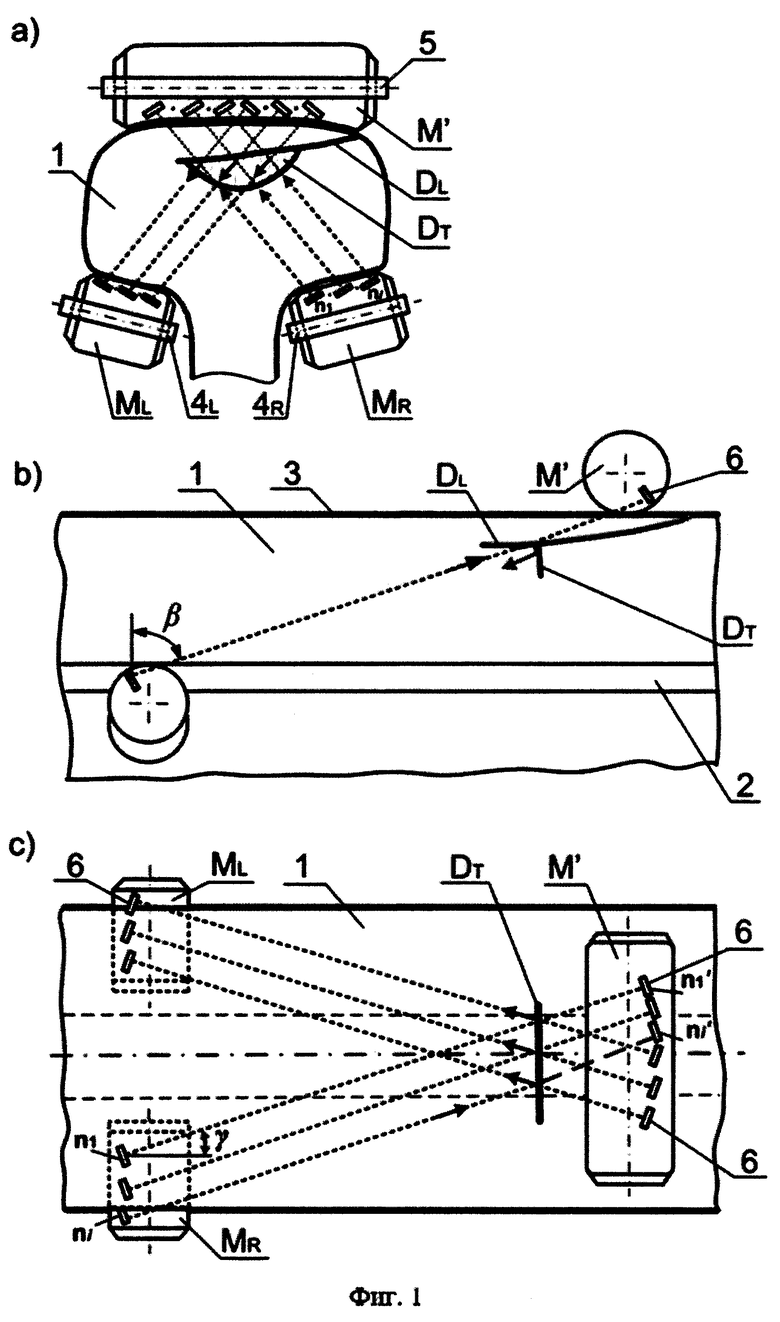
Ультразвуковой способ обнаружения дефектов в головке рельса, заключающийся в том, что в окрестности предполагаемого дефекта на нижние грани головки рельса устанавливают наклонные электроакустические преобразователи, синхронно перемещают их по указанным поверхностям, зондируют головку рельса, для чего преобразователем с одной нижней грани излучают ультразвуковые сигналы, принимают отраженные от плоскости дефекта эхо-сигналы преобразователем на другой нижней грани головки рельса, анализируют их и определяют наличие дефекта в головке рельса, отличающийся тем, что возбуждение и прием ультразвуковых колебаний проводят линейками пьезопластин, размещенными поперек головки рельса в роликовых преобразователях с упругой оболочкой, дополнительно на поверхность катания головки рельса размещают роликовый преобразователь с пьезопластинами, сонаправленными с пьезопластинами на нижних гранях головки рельса, и перемещают его синхронно с преобразователями на нижних гранях, количество пьезопластин в линейках выбирают исходя из требуемой разрешающей способности и полноты озвучивания дефекта, границы продольной трещины определяют теневым методом, а параметры локальных неровностей поверхности катания - по времени пробега ультразвуковых колебаний от нижней грани до поверхности катания.
| СПОСОБ УЛЬТРАЗВУКОВОГО КОНТРОЛЯ ГОЛОВКИ РЕЛЬСА | 2006 |
|
RU2308027C1 |
| СПОСОБ УЛЬТРАЗВУКОВОГО ОБНАРУЖЕНИЯ МИКРОТРЕЩИН НА ПОВЕРХНОСТИ КАТАНИЯ ГОЛОВКИ РЕЛЬСА | 2017 |
|
RU2652511C1 |
| СПОСОБ УЛЬТРАЗВУКОВОГО ОБНАРУЖЕНИЯ МИКРОТРЕЩИН НА РАБОЧЕЙ ВЫКРУЖКЕ ГОЛОВКИ РЕЛЬСА | 2015 |
|
RU2613574C1 |
| СПОСОБ УЛЬТРАЗВУКОВОГО ОБНАРУЖЕНИЯ МИКРОТРЕЩИН НА РАБОЧЕЙ ВЫКРУЖКЕ ГОЛОВКИ РЕЛЬСА | 2013 |
|
RU2545493C1 |
| US 5020371 A, 04.06.1991 | |||
| US 4700574 A, 20.10.1987. | |||

