Изобретение относится к автоматическому управлению объектами с нестационарными параметрами, в частности к самонастраивающимся сис темам управления с эталонной модель Известна самонастраивающиеся сие темыг содержащие этгшонную модель, выявитель рассогласования между выходными сигналами объекта и эталонной модели, сумматор сигналов обратных связей на входе объекта, бло перестройки коэффициентов обратных связей и блок выработки сигналов настройки lit. Однако алгоритм работы такой сис темы ,не учитывает изменения уровня ограничения скорости выходной коорд наты объекта, что приводит к недоис пользованию потенциальных возможностей объекта улравления. Наиболее близкой к изобретению по технической сущности является самонастраивающаяся система, содержащая блок ограничения, последовательно соединенные интегратор, первый блок сравнения и линейный фильт и последовательно соединенные второ блок сравнения, объект управления, третий блок сравнения, блок настройки и блок с переменным коэффициентом, второй вход которого соедине с вторым входом блока настройки и с первым входом третьего блока срав нения, второй вход которого соедине с выходом интегратора, а вторые входы первого и второго блоков срав нения объединены 2. Целью изобретения является повышение динамической точности работы системы. Поставленная цель достигается тем, что самонастраивающаяся система также содержит первый делитель и последовательно соединенные эталонную модель, четвертый блок сравнения, второй делитель, сумматор, фильтр нижних часто- и умножитель, выход линейного фильтра через после довательно соединенные первый делитель, блок ограничения и умножитель соединен с входом интегратора, первый вход умножителя соединен с вторым входом первого делителя, а выхо второго блока сравнения соединен с входом эталонной модели и вторым входом второго делителя. На фиг, 1 представлена функциональная схема самонастраивающейся системы ; на фиг. 2 - временные диаг раммы работы системы. На схеме приняты следующие обозначения: и - управляющее воздействне ; сГ- входной сигнал объекта; Хэ - выходной сигнал основной этало ной модели Xjj. - выходной сигнал объекта} Е k - ой1Ибка рассогласования } оС - сигналы настройки блока перестраиваемых коэффициентов Z - сигнал сдвига уровня k - оценка коэффициента передачи объекта. Система содержит объект 1 управления , эталонную основную )модель 2, третий 3 и второй 4 блоки сравнения, блок 5 с переменным коэффициентом (обратных связей), блок б настройки, первый блок 7 сравнения (основной модели, линейный фильтр 8, первый делитель 9, блок 10 ограничения, умножитель 11., интегратор 12, эталонную модель 13, четвертый блок 14 сравнения, втор л делитель 45, сумматор 16 и фильтр 17 нижних частот. Схема работает следующим образом. . Ограничение скорости выходной координаты объекта х определяется двумя факторами: во-первых, ограничением энергии, подводимой к объекту, во-вторых, инерционностью нагрузки объекта. Для конкретного объекта уровень ограничения энергии есть величина постоянная, зависящая от конструктивных параметров, инерционность же нагрузки может изменяться в значительных пределах. Так, если выходной координатой является скорость вращения uj, из основного уравнения движения аг где MдJ,- динамический момент; D - момент энергии нагрузки, можно оценить величину ограничения ускорения ( ) Мдин mctx , dt /пхлх J , В частности, для электроприводов величиной, определякядей ограничение динамического момента, является уровень ограничения тока двигателя, для гидроприводов - величина максимального давления. Структурно эти соотношения можно представить в.виде последовательного соединения звена ограничения, характеризующего уровень ограничения момента (энергии ) и интегратора с коэффициентом передачи 1/J, изменяющимся при изменении -инерционности нагрузки. При традиционном выборе стационарных параметров эталонной модели их определяют из условия максимального совпадения движений модели и объекта с учетом ограничений при максимальной инерционности нагрузки/ так как при нарушении этого требования может окапаться, что объект принципиально не сможет достичь скоростей изменения координат, задаваемых эталоном, что предопределит неустойчивость процессов самонастройки. При уменьшении инерционности нагрузки объект .потенциально будет способен развивать большие скорости, однако при жестких параметрах модели и нор мальной работе контуров самонастрой ки он будетвынужден следовать за эталоном. Для приведения в соответствие уставок эталонной модели и потенциальных возможностей объекта, меняющихся с изменением нагрузки, используется измерение степени инерционности нагрузки и перестройка параметров модели. Для оценки инерционности объекта, мерой которого является коэффициент передачи объек та управления, используется схема, состоящая из элементов 13-17. Без учета переходных процессов выходной сигнал фильтра нижних частот 17 (фНЧ) в соответствии со схемой определится как , фильтра ниж них.частот 17; Кр - коэффициент передачи объекта 1; Kj - коэффициент передачи эталонной модели 13; Кд - масштабный коэффицие делителя 15. Выбирая сигнал сдвига уровня велиЧИНОЙ К , получаем к ифнч Л т.е. выходной сигнал ФНЧ 17 является некоторой оценкой коэффициента передачи объекта. Выбором параметров эталонной модели 13 максимально соот.ветствук щими расчетным номинальным ) параметрам объекта гарантируется несме . щенность этой оценки не только в установившихся, но и в переходных режимах с точностью до погреишости соответствия параметров объекта 1 . модели 13. Наличие этой погрешност приводит к гЮявлению некоторой оши ки в оценке коэффициента в переход ных режимах, что требует включения в схему фильтра нижних частот 17. Схема основной эталонной модели 2 содержит блок 10 ограничения и умножитель 11. Уровень ограничения блока 10 выбирается равным уровню ограничения объекта. При подаче на вход умножителя 11 сигнала оценки коэффициент передачи соединения умножитель 11 - интегратор 12 изме няется таким же образом, как и коэффициент передачи интегратора- в структурном представлении объекта управления. Таким образом, динамические характеристики эталонной модели 2 пр водятся в соответствие с изменякяци мися возможностями объекта 1 управления, что гарантируется совпадением ограничений скорости изменения выходных координат эталонной модели 2 и объекта 1 при изменении инерционности нагрузки объекта. Однако при осуществлении с этой целью изменения коэффициента передачи умножителя 11 изменяется контурный коэффициент передачи эталонной модели как замкнутой динамической системы, что приводит к изменению уставок показателей качества эталонной модели что особенноскажется при работе эталонной модели (и объекта ) в ли-нейном режиме. С целью сохранения динамических параметров линейного режима в схему эталонной модели 2 введен первый блок деления 9, на вход де 1ителя которого подан тот . же сигнал, что и на управлякяций вход умножителя 11. В этом случае контурный коэффициент передачи эталонной модели 2 не будет зависеть от величины сигнала л при работе модели в линейном режиме, что следует из очевидного соотношения Т -11 - KQ К где КдК:| - коэффициенты передачи де лителя 9 и умножителя 11; Kg соответственно их масштабные коэффициенты. Параметры линейного фильтра 8 выбираются обычным образом при предложении линейности объекта управления и эталонной модели. На фиг. 2 приведены временные диаграммы работы системы в виде реакции.на ступенчатое изменение управляющего сигнала и двух различных уровней. Индексом 1 обозначена реакция системы при номинальных параметрах и максимальной- инерционности нагрузкн. При стационарных параметрах модели такая реакция будет обеспечиваться и при минимальной инерционности нагрузки, хотя объект может обес4 печить реакцию вида П вследствие поЧ вышения уровня ограничения скорости. При стационарных параметрах модели ., реакция на меньшее входное воздейст-вие будет иметь вид кривой Ш, что свидетельствует о явном недоиспользовании возможностей объекта. При работе звеньев оценки К объекта и перестройке ее параметров в соответствии с схемой (.фиг. 1} реакция системы при минимальной инерционности нагрузки будет иметь вид кривой Q -при реакции на управление U2 и вид кривой IY при реакции на управление О. Кривая V характеризует реакцию системы при наличии .ограничения в схеме эталонной модели
2, но при исключении делителя 9 и умножителя 11,
Таким образом, реальное повышение быстродействия систелвл характер 1зуется уменьшением времени первого согласования с t до t при Максимальном управляющей воздействии U и с t до ti-npn некотором меньшем значении управления U.
Технико-экономический эффект от внедрения подобной структуры .определяется повышение быстродействия
системы,.что приводит к повышению динамической точности системы,Этот факт может оказаться реша1р1цим при выборе структурной схемы систе1« уп равления такими объектами, как металлообрабатывающие станки и летательные аппараты. При макетировании систек« управления на аналоговой вычислительной машине отмечено уменьшение времени переходного процесса по Сравнению с известной системой в 2-7 раз в зависимости от уровня управляющего воздействия.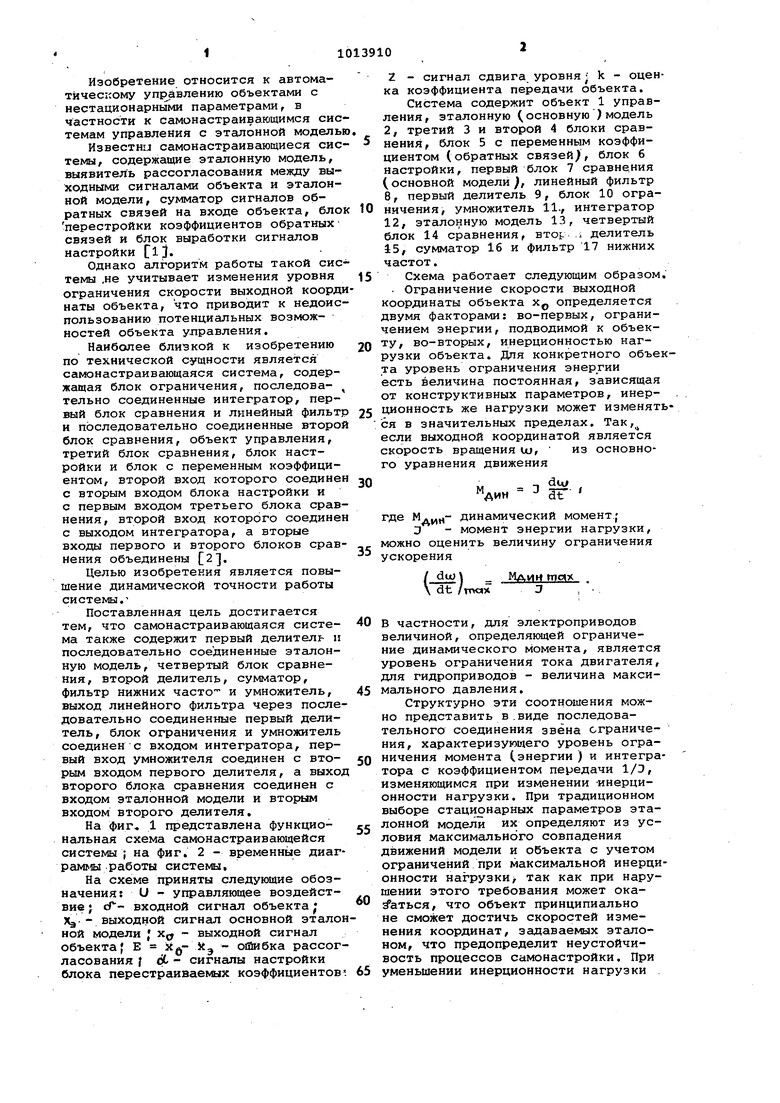


| название | год | авторы | номер документа |
|---|---|---|---|
| Самонастраивающаяся система управления | 1985 |
|
SU1249478A1 |
| ЭЛЕКТРОПРИВОД ПОСТОЯННОГО ТОКА | 1990 |
|
RU2011286C1 |
| Самонастраивающаяся система | 1980 |
|
SU928302A1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКАЯ СЛЕДЯЩАЯ СИСТЕМА | 1996 |
|
RU2111521C1 |
| Самонастраивающаяся система управления | 1983 |
|
SU1158974A1 |
| Самонастраивающаяся система управления | 1977 |
|
SU650053A1 |
| Самонастраивающаяся система управления | 1980 |
|
SU962852A2 |
| Самонастраивающийся регулятор | 1981 |
|
SU960731A1 |
| САМОНАСТРАИВАЮЩЕЕСЯ УСТРОЙСТВО С ЭТАЛОННОЙ МОДЕЛЬЮ | 1972 |
|
SU328433A1 |
| Способ автоматического регулирования частоты вращения ротора синхронного генератора и регулятор для его реализации | 2023 |
|
RU2823536C1 |
САМОНАСТРАИВАЮЩАЯСЯ СИСТЕМА, содержащая блок ограничения, последовательно соединенные интегратор, первый, блок сравнения и линейный фильтр и последовательно соединенные второй блок CE двнeния, объект управления, третий блок сравнения, блок настройки и блок с переменным коэффициентом, второй вход которого соединен с вторым входом брока настройки и с первым входом третьего блока сравнения, второй вход которого соединён с выходом интегратора, а вторые входы первого и второго блоков сравнения объединены, отличающаяся тем, что, с целью повышения динамической точг ности системы, она содержит первый делитель и последовательно, соединенные эталонную модель,, четвертый Ьлок сравнения, второй делитель, сумма-г тор, фильтр нижних частот и умножитель, выход линейного фильтра через последовательно соединенные первый делитель, блок ограничения.и ум- ножитель соединен с входом интегра(О тора, первый вход умножителя соедиО нен с вторым входом первого дели- т,еля, а выход второго блок Ьравнения соединен с входом эталонной модели и вторым входом второго делителя. . гЭ -.J.
t/ 2 fj
Фие.1
t
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Петров Б.Н | |||
| и др.Принципы построения и проектирования самонастраивакшшхся систем управления | |||
| М., Маишностроение, 1972, с | |||
| Переносная печь-плита | 1920 |
|
SU184A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Громыко В.Д., Санковский Е.А | |||
| Самонастраивающиеся системы с моделью | |||
| М., Энергия, 1974, с | |||
| Устройство для электрической сигнализации | 1918 |
|
SU16A1 |
