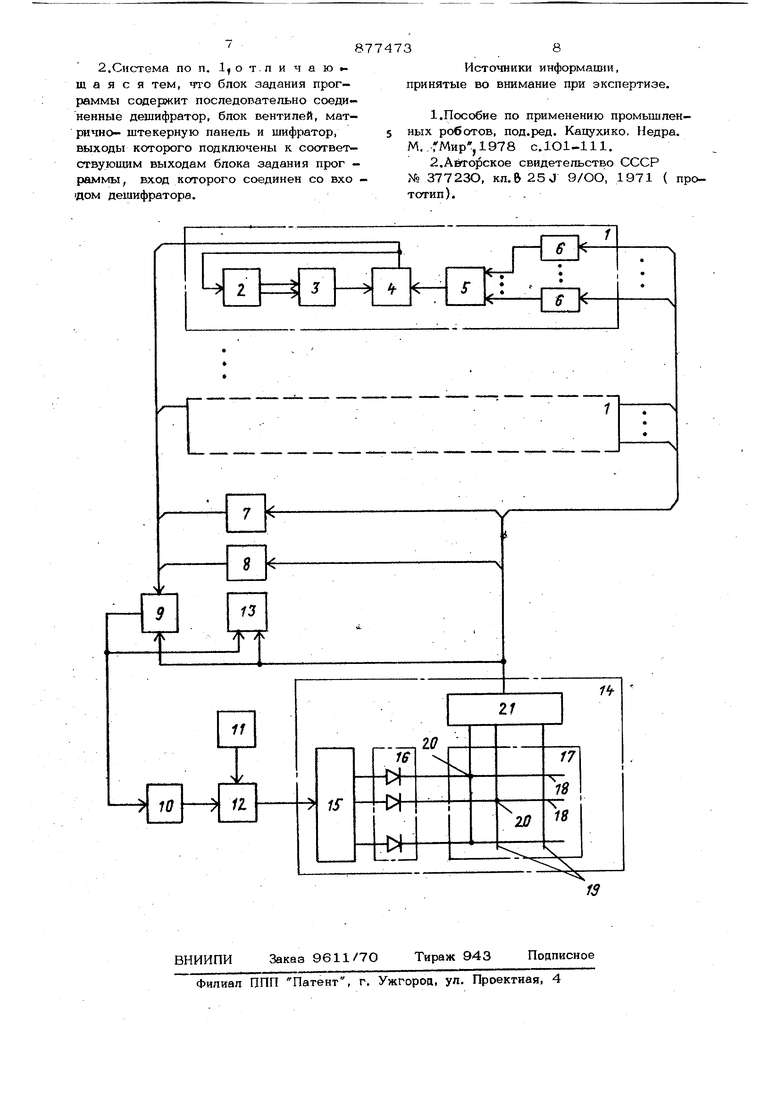
Изобретение относится к автоматизации и--Ьычиспитепьной технике и может быть использовано для управления промышленными работами различного назначения. Известна система позиционного управления промышленным роботом, содержаща последовательно соединенные блоки координатного управления, блок обучения и блок хранения информации tlj Однако эта система имеет сложный процесс перепрограммирования и непрограммирования. Наиболее близкой к предлагаемой по технической.сущности является система позиционного управления промышленным роботом, содержащая последовательно соединенные блок обучения, ключ и блок задания программы, выходы которого подключены соответственно ко входам блока задержки, блока исполнительныхустройств и первому входу блока цифровой индикации, и по каждой регулируемой координате псюледовательно соединенные блок задания точек ,позиционирования элемент ИЛИ, первый блок. сравнения, привод и датчик положения, выход которого подсоединен ко второму входу первого блока сравнения, причем входы блока задания точек позиционирования подключены к соответствующим выхопам блока задания программы Г2, Недостатком Ътой системы является наличие в системе электромеханического блока хранения информации, состоящего из шагового привода, блока считывания и штекерного барабана с установленными на нем штекерами, используемыми в качестве элементов памяти, что усложняет конструкцию системы, снижает ее быстродействие и надежность, приводит к уве личению ее веса, стоимости и габаритов. Кроме того, к недостаткам указанной системы следует отнести ограниченную информационную емкость электромеханического блока хранения информации и большое количество элементов памяти, что ограничивает, функциональные возможности системы J и усложняет процесс смены и корректуровки хранящейся информации, к уторы& пр изводится механическим путем. Цепь изобретения- расширение функциональных возможностей системы. Поставленная цель достигаетсятем, что в систему введены последовательно соединенные второй блок сравнения и коммутатор кодов, выход которого подключен ко второму входу ключа, входы второго блока сравнения соединены соот ветственно с выходами блока задержки и блока исполнительных устройств,соот ветсгвуюшим выходом блока задания прог раммы и выходом первых блоков сравне а выход подключен ко второму входу (блока цифровой индикации. Блок задания программы содержит последовательно соединен а1е дешифратор блок вентилей, матрично-штекерную па- нель и шифратор, выходы которого подключены к соответствуюшим выходам блока задания программы, вход которого соединен со входом дешифратора. На чертеже представлена функционапЬ ная схема предлагаемой системы. Сисиема содержит блоки 1 координатного управления, в состав которых входят приводы 2, датчики 3 положения, первые блоки 4 сравнения, элементы ИЛИ 5, блоки 6 задания точек позиционирования, блок 7 задержки (времени), блок 8 исполнительных устройств, второй блок 9 срав ,нения, коммутатор Ю кодов, блок 11 обучения, ключ 12, блок 13 цифровой ин дикации и блок 14 задания программы, состав которого входят дешифратор Д5, блок 16 вентилей, матрично-щтекерная панель 17, образованная системой адресных 18 и числовых 19 шин и устано ленных в их перекрестиях гальванически апементов 2О связи, и шифратор 21 . Система работает следующим образом В режиме обучения и программирован ко входу дешифратора 15 при помощи ключа 12 подключается блок 11 обучен выполияюший в этом режиме функции шагового устройства и вырабатывающий по команде оператора коды шага, кажды из которых соответствует определенному шагу программы. Оператор .имитируя пошаговую обработку заданной программы, последова тельно подает с блока 11 обучения на вход дешифратора 15 коды шагов программы. На соответствующем выхоце дешифратора 15 при поступлении на его вход какого-плибо кода шага вырабатывается адресный сигнал, который через соответствующий развязывающий лчод блока 16, адрпсиук ицггу Л.Я, гальгзаии- чоский элемент 2О связи и числовую шину 19 подается на один из входов шиф ратора 21. При этом на выходе шифратора 21 вырабатывается код выбранного слова, определяющий работу системы в течение текущего шага программы. Шифратор 21 обеспечивает формирование всех возможных кодов чисел, задаваемых при помощи-наборного поля, и имеет 2 входов и п выхоаов, где п -количество разрядов этих чисел. Единичные сигналы разрядов кода числа, формируемого шифратором 21, используются в качестве команд управления соответствующими элементами системы, например, включения блока 7 выцержек.времени, включения соответствуюЕШх исполнительных устройств блока В. Процесс программирования заключа.ется в том, что оператор при помоши гальванического элемента 2 О Связи подклю чает к адресной шине 18, возбужденной в течение текущего шага программы, ту числовую шину, при возбуходении которой на выходе шифратора 21 формируется код числа, соответствующий программе теку- niero шага. Номер возёужденной адресной: шины 18 и код fljcna, вырабатываемый шифратором 21, при установке гальванического элемента 2О связи контролируются оператором при помощи блока 13 цифровой индикации. Задание точек позиционирования при перемещении узлов робота по какой - либо координате осуществляется оператором при помощи блоков 6 задания точек позиционирования. При этом соответствующими сигналами, вырабатываемыми шифратором 21, в течение текущего шага программы производится включение датчика 3 положения и одного из блоков 6, входящих в состав данного блока 1 координатного управления, а на соответствующем выходе первого блока 4 сравнения кодов формируется сигнал, поступающий в привод 2, который производит координатное перемещение, скорость и направление которого определяются соотношением кодов, поступа- юшлх на входы первого блока 4 сравнения с выходов кодового датчика 3 положения и активизированного задатчика. Перемещение привода 2 производится до момента совпадения кодов, поступающих на входы блока 4 сравнения, что соответCTBycjT устапоике иршмэда 2 в заданной TOiKO позициои11рова ия, после чего выра ботка сигнада управпония нриводог ; прекращается, а на другом выходе бпока 4 сравнения формируется eдкнич ый сигнал обратной связи, поступающий на соответствующий вход второго блока 9 сравнения.
Таким же образом на соотБетствующие входы блока 9 сравнения поступают единичные сигналы обратной связи, формиру«емые блоком 7 выдержек времени, после окончания выработки заданной выдержки времени, и исполнительными устройст- вами блока 8 после выпогюения ими пре- js дусмотренных операций. Сигналы обратной связи подаются на входы второго блока 9 сравнения таким образом, что их совокупность образует после окончания всех предусмотренных программой операиий код, который соответствует коду, выраба- тываемому шифратором 21 в течекЕ-5е текущего шага программы. При этом на выходе блока 9 сравкения вырабатывается единичнь й сигнал, постуйающий на соответствующий вход блока 13 индикации, который сигнализирует о выполнении всех предусмотренных в течение текущего шага операций и о разрешении перейти к программированию очеред ного шага программы, после чего оператор при помощи блока 11 обучения подает на вход дешифратора 15 код следующего шага программы и т.д. В процессе работы на вход дешифратора 15 с коммутатора 1О кодов, подключенного при помощи ключа 12 вместо блока 11 обучени поступает код, соответствующий первому шагу программы. При этом на выходе дешифратора 15 возбуждается первая шина, сигнал с которой при помощи панели 17 подается на выбранный при программировании вход шифратора 21, на выходе которого вырабатывается соответствующий код числа, поступающий на вход блока 9 сравнения и вход блока 13 индикации и используемый для управления установленных элементов системы. После выполнения элементам ; системы предусмотренных операций код, образованный совокупностью сигналов обратной связи, поступающий на один из входов блока 9 сравнения, будет соответствозать коду числа, вырабатываемому шифратором 21 и поступающему на другой вход блока 9 сравнения. При этом на выходе блока 9 сравнения вырабатывается сигнал, переводящий коммутатор 1О кодов в следующее состояние, после чего происходит отработка
системой следующего шага программы н т.д. .
Таким образом, совокупность команд управления, вырабатываемых шифратором 21 в течение каждого шага программы, Зстанавяивается при помощи одного гальванического элемента 2О связи, поэтому обшее количество элементов связи сокращается, а процесс смены информации в блоке наборного поля упрощается.Кроме того, использование в системе блока 13 нндг каоии также упрощает процесс смены хранящейся информации и корректировку ошибок в программе и позволяет оператору контролировать работу системы. Применение изобретения позволяет облегчить работу оператора по обслуживанию системы и упростить процесс перепрограммирования. Кроме того, упрошение блока 14 задания программы и ограниченное количество элементов памяти позволяет увеличить число шагов прЪграмыы к количество выходных команд, чтЪ расширит функциональные возможности системы. Формула изобретен и.я 1.Система позиционного управления промьш1ленным роботом, содержащая последовательно соединенные блок обучения, ключ и блок задания программы, выхоцы которого поцключены соответсгвсгнно входам блока задержки, блока исполнительных устройств и первому входу блока цифровой индикации к по каждой регулируемой координате последовательно соединенные блок задания точек позицно- нирования, элемент ИЛИ, первый блок сравнения, привод и датчик положения, выход которого подсоединен ко второму входу первого блока сравнения, причем входы блока задания точек позидиоггарования подключены к соответствующим выходам блока задания программы, отличающаяся тем,что, с цепью расширения функциональных возможностей системы, она содержит последовательно соединенные второй блок сравнения и коммутатор кодов, выход которого поп- ключен ко второму входу ключа, входы вгорого блока сравнения соединены соответственно с выходами блока задержки и блока исполнительных устройств, соогвег- ствуюшим выходом блока задания программы и выходом первых блоков србш- нения, а выход- со вторым входом блока Ш1ФРОВОЙ индикации.
2.Система по п, 1,о т.п и ч а ю щ а я с я тем, что блок задания программы содержит последовательно соединенные дешифратор, блок вентилей, матрично- штекерную панель и шифратор, выходы которого подключены к соответствующим выходам блока задания прог раммы, вход которого соединен со вхо - 1ДОМ дешифратора.
Источники информаш1и, принятые во внимание при экспертизе.
1.Пособие по применению промышленных роботов, под.ред. Кацухико, Недра. М. .fMHpjlQTS с.101-111.
2.Авгторское свидетельство СССР N 37723О, КЛ.& 25 J 9/ОО, 1971 ( прототип)..
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для обучения операторов | 1987 |
|
SU1564675A1 |
| Тренажер радиотелеграфистов | 1985 |
|
SU1354237A1 |
| Тренажер радиотелеграфиста | 1979 |
|
SU824270A1 |
| Тренажер операторов систем управления | 1981 |
|
SU953652A1 |
| Устройство для обучения телеграфному коду морзе | 1972 |
|
SU581489A1 |
| Устройство для оценки профессиональной пригодности операторов автоматизированных систем управления | 1980 |
|
SU920818A1 |
| Тренажер радиотелеграфиста | 1981 |
|
SU1012321A1 |
| Устройство для обучения операторов | 2016 |
|
RU2615836C1 |
| Устройство для контроля работы оператора | 1987 |
|
SU1497631A1 |
| Тренажер радиотелеграфиста | 1986 |
|
SU1336087A1 |
