Привод поворота 8 параллелограммного механизма 4 состоит из установочного винта 15, размещенного в корпусе 1 с помощью втулки 16 и гайки 17, щарнирно закрепленной на раме 2.
Кулисный механизм 9 состоит из тяги 11, на которой щарнирно установлен ползун 18, и тяги 19, жестко соединенной со звеном 20 четырехзвенника 6, при этом ползун 18 связан с тягой 19 с возможностью продольного перемещения по ней.
Четырехзвенники 5 и 6 связаны между собой посредством кулисного механизма 9 и плеча 21, жестко соединенного со звеньями 22 п 23, соответственно входящими в четырехзвенпики 5 и 6. Таким образом, четырехзвеыник 5 состоит из звеньев 10, 22 и 24, щарнирно соединенных собой, а свободные концы звеньев 10 и 24 щарнирно соединены с рамой 2. Четырехзвенник 6 состоит из звеньев 20, 23 и 25, щарнирно соединенных между собой, а свободные концы звеньев 20 и 25 щарнирно соединены с замыкающим звеном 26, на котором жестко установлена направляющая 27 с устройством для набрызгбетонирования 28, перемещающимися по ней.
Устройство для пабрызгбетонирования 28 снабжено соплом 29, а установочные винты 12 и 15 снабжены рукоятками 30.
Манипулятор с помощью корпуса 1 павещивается на кабину 31, а кабина 31 в свою очередь устанавливается па передвижные подмости 32 с возмолспостью перемещения по их арке.
Работа манипулятора при набрызге бетона, например, на внещнюю поверхность нневмоопалубки с передвижных арочных подмостей 32 осуществляется следующим образом.
Для ведения работ по набрызгбетонированию манипулятор с помощью корпуса 1 навешивается на кабину 31, перемещающуюся по передвижным подмостям 32. В крайнем нижнем положении кабины 31 на подмостях 32 оператор посредством вращения установочного винта 12 привода подъема 7 устанавливает сопло 29 на оптимальном расстоянии от поверхности набрызга - пневмоопалубки. Затем вращением рукоятки 30 установочного винта 15 привода поворота 8 сопло 29 поворачивается в положепие нормали к поверхности набрызга (или близкое к нему положение), что обеспечивает эффективное и качественное набрызгивание бетона па криволинейную поверхность. В процессе работы оператор может корректировать угол наклона сопла 29 по визуальному наблюдению за поверхностью и качеством набрызга.
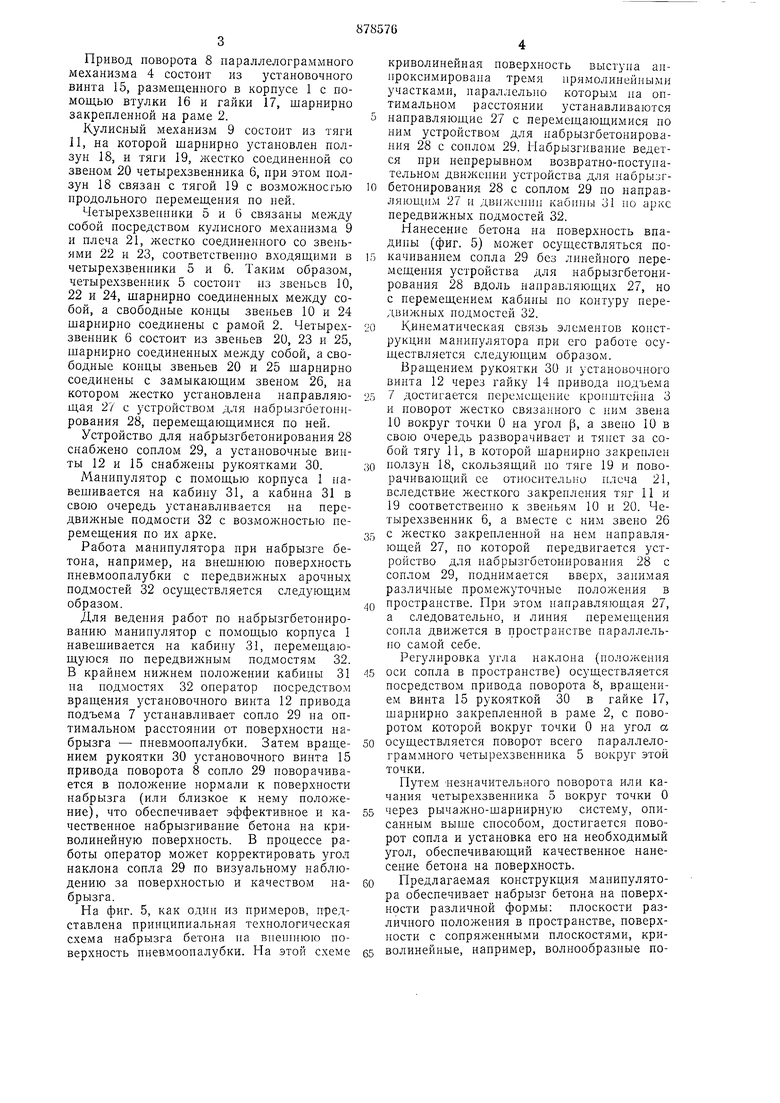
На фиг. 5, как один из примеров, представлена принципиальная технологическая схема набрызга бетона па внешнюю поверхность пневмоопалубки. На этой схеме
криволинейная поверхность выступа аппроксимирована тремя прямолинейными участками, параллельно которым па оптимальном расстоянии устанавливаются направляющие 27 с перемещающимися по ним устройством для набрызгбетонирования 28 с сонлом 29. Набрызгивание ведется при непрерывном возвратно-поступательном движении устройства для набрызгбетонирова ния 28 с соплом 29 по направляющим 27 п двпжсппп кабины 31 по арке передвижных подмостей 32.
Нанесение бетона на поверхность впадипы (фиг. 5) может осуществляться покачиванием сопла 29 без линейного перемещения устройства для набрызгбетонирования 28 вдоль направляющих 27, но с перемещением кабины по контуру передвижных подмостей 32.
Кинематическая связь элементов конструкции манипулятора при его работе осуществляется следующим образом.
Вращением рукоятки 30 и установочного винта 12 через гайку 14 привода подъема
7 достигается перемещение кронштейна 3 и поворот жестко связанного с ним звена 10 вокруг точки О на угол р, а звепо 10 в свою очередь разворачивает и тянет за собой тягу 11, в которой щарнирно закреплен
ползун 18, скользящий но тяге 19 и поворачивающий ее относительно плеча 21, вследствие жесткого закрепления тяг 11 и 19 соответственно к звеньям 10 п 20. Четырехзвенник 6, а вместе с ним звено 26
с жестко закрепленной на нем направляющей 27, по которой передвигаетея устройство для пабрызгбетонирования 28 с соплом 29, поднимается вверх, занимая различные промежуточные положения в
пространстве. Нри этом направляющая 27, а следовательно, и линия перемещения сопла движется в пространстве параллельно самой себе.
Регулировка угла наклона (положения
оси сопла в пространстве) осуществляется посредством привода поворота 8, вращением винта 15 рукояткой 30 в гайке 17, шарнирно закрепленной в раме 2, е поворотом которой вокруг точки О на угол а
осуществляется поворот всего параллелограммного четырехзвеннпка 5 вокруг этой точки.
Нутем Незначительного поворота или качания четырехзвеннпка 5 вокруг точки О
через рычажно-шарнирную систему, описанным выще способом, достигается поворот сопла и установка его на необходимый угол, обеспечивающий качественное нанесение бетона на поверхность.
Нредлагаемая конструкция манипулятора обеспечивает набрызг бетона на поверхности различной формы: плоскости различного положения в прострапстве, поверхности с сопряженными плоекостями, криволинейные, например, волнообразные поверхности, используемые в пневмоопалубках с целью повышения жесткости и устойчивости сооружений.
Предлагаемый манипулятор рычажношарнирной системы с ручным приводом cyniecTBeiiHO ynponiaeT ко гструк1ппо и схему управления, повышает надежность и эффективность его работы по набрызгу бетона на новерхности разнообразной формы, что значительно расширяет область его применения.
Манипулятор может найти применение в строительстве, горной и другой нромышленности, то есть там, где выполнение работ связано с обеспечением линейных и угловых перемепдений различных устройств типа сопла, насадок, разбрызгивателей и др.
Применение его позволяет значительно упростить конструкцию и управление устройства и обеспечить эффективное ведение набрызгбетонных работ.
Формула изобретения
1. Манипулятор, содержащий корпус с рамой и кронштейном, параллелограммный механизм, состояш:ий из четырехзвенников
с приводами подъема и поворота механизма, и рабочий орган, отличающийся тем, что, с пелью упроп1;ения конструкции манип лтятора и обеспечения эффективного
ведения набрызгбетонных работ на криволинейные новерхностн. манипулятор снабжен кулисным механизмом, состояншм из соединенных между собой ползуном тяг, жестко связанных с упомянутыми четырехзвенниками, причем ползун шарнирно закренлен на одной из тяг с возможностью перемещения вдоль другой тяги, при этом приводы подъема и поворота механизма выполнены в виде установочных винтов с
гайками, а рабочий орган жестко соединен с одним из четырехзвенников.
2. Манипулятор по п. 1, отличающийс я тем, что установочный винт привода нодъема механизма размещен на раме, а
гайка его щарнирно установлена на кронштейне, нри этом установочный винт привода новорота механизма размещен на корпусе, а его гайка шарнирно установлена на раме.
Источники информации,
принятый во внимание нри экспертизе I. Авторское свидетельство СССР № 697316, кл. В 25J 3/02, 1978.

| название | год | авторы | номер документа |
|---|---|---|---|
| Передвижные подмости для обслуживания сооружений арочной формы | 1980 |
|
SU898009A1 |
| Устройство для выполнения набрызгбетонных работ | 1990 |
|
SU1789711A1 |
| Устройство для набрызга твердеющих смесей | 1988 |
|
SU1671874A1 |
| Самоходная опалубка | 1989 |
|
SU1693253A1 |
| Манипулятор для набрызгбетонирования | 1984 |
|
SU1198213A1 |
| Манипулятор | 1983 |
|
SU1186464A1 |
| Устройство для возведения набрызгбетонной крепи | 1979 |
|
SU885563A1 |
| Устройство для крепления горной выработки | 1988 |
|
SU1631179A1 |
| Установка для набрызгбетонирования и тампонажа | 1982 |
|
SU1102965A1 |
| Швейная машина зигзаг | 1981 |
|
SU1089187A1 |


i2
