Изобретение относится к шагающим транспортным средствам повышенной проходимости и может быть использовано в самоходных многоопорных транспортных средствах.
Известны шагающие опоры для многоопорных самоходных машин и для транспортных средств повышенной проходимости, выполненные в виде шагающей опоры, содержащей несущий корпус, на котором с каждого борта установлены шагающие движители в виде шарнирных четырехзвенников лямбдаобразного типа, снабженные общим башмаком, а также силовой привод и самоблокирующийся межосевой дифференциал (Патент РФ 2063353, М.кл. В 62 D 57/032, 1996 г.).
Недостатками данных шагающих опор являются шагающие движители со сравнительно малой высотой подъема башмаков в их фазе переноса, что обуславливает невысокую профильную проходимость, и компоновочная схема взаимосвязи каждой пары шагающих движителей со сложной межбортовой дифференциальной связью, предназначенной для снижения неравномерности движения и вертикальных колебаний корпуса, обусловленных использованием шагающих движителей лямбдаобразного типа.
Наиболее близким по техническому уровню и достигаемому результату является устройство в виде шагающей опоры для транспортных средств повышенной проходимости, содержащей несущий корпус, на котором с каждого борта установлены по два шагающих движителя, выполненных в виде шарнирных четырехзвенников лямбдаобразного типа, расположенных в вертикальной плоскости, содержащих криволинейные опоры, снабженные башмаками и шарнирно связанные с кривошипами и с качающимися рычагами, свободные концы которых шарнирно соединены с корпусом, а также силовой привод, кинематически связанный с кривошипами шагающих движителей (Патент РФ 2063354, М.кл. В 62 D 57/032, 1996 г. ).
Недостатками данной шагающей опоры являются компоновочная система попарно взаимосвязанных шагающих движителей простейшего лямбдаобразного типа с шарнирно установленной стопой и сравнительно малой высотой подъема опорных точек башмаков, ограниченной габаритными размерами звеньев шагающего движителя, что в совокупности со слабой адаптацией к неровностям грунта общего башмака не обеспечивает достаточно высокую проходимость, а также не обеспечивает плавную смену стоп, находящихся в опоре, равномерность прямолинейного движения и не исключает вертикальные колебания корпуса.
Данная шагающая опора имеет сравнительно невысокий технический уровень, что обусловлено использованием простейших шагающих движителей лямбдаобразного типа с шарнирно установленными стопами в виде общих башмаков, расположенных параллельно корпусу, что не позволяет реализовать типы походок с дополнительной фазой опоры на пятку башмака и плавной сменой стоп, лишает шагающую опору возможности адаптироваться к неровностям грунта, в результате уменьшается площадь контакта башмаков с грунтом и не обеспечивается достаточно низкое давление на грунт. По этой причине, а также из-за малой высоты подъема опорных точек шагающего движителя, ограниченной габаритными размерами его звеньев, профильная проходимость транспортного средства с такими шагающими опорами сравнительно невысока. Кроме того, взаимосвязь в шагающей опоре каждой пары шагающих движителей указанного типа не обеспечивает равномерность прямолинейного движения и не исключает вертикальные колебания корпуса.
В этой связи важнейшей задачей является создание новой конструктивной системы взаимодействия попарно закрепленных шагающих движителей, кинематически взаимосвязанных и снабженных новым механизмом установки стопы на грунт, обеспечивающей принципиально новую походку шагающей опоры с дополнительной фазой опоры на пятку башмака и плавной сменой стоп, что приводит к снижению потерь на ударное взаимодействие стопы с грунтом, улучшенной адаптации башмаков шагающей опоры к неровностям грунта, снижению среднего давления на грунт и повышенной профильной проходимости транспортного средства за счет возможности преодолевания препятствий, превосходящих по высоте величину подъема опорных точек шагающих движителей, и снижает неравномерность прямолинейного движения, вертикальные колебания корпуса и энергозатраты, связанные с ними.
Техническим результатом заявленной конструкции шагающей опоры является создание новой конструктивной системы взаимодействия попарно скомпонованных и кинематически взаимосвязанных шагающих движителей, снабженных дополнительным принципиально новым механизмом установки стопы на грунт, что обеспечит безударное взаимодействие стопы с грунтом и улучшенную адаптацию башмаков шагающей опоры к неровностям грунта, повышенную профильную проходимость, за счет возможности преодолевания препятствий, превосходящих по высоте величину подъема опорных точек шагающих движителей, и снизит неравномерность прямолинейного движения, вертикальные колебания корпуса транспортного средства и энергозатраты, связанные с ними.
Указанный технический результат достигается тем, что шагающая опора для транспортных средств повышенной проходимости, содержащая корпус с установленными на нем шагающими движителями, выполненными в виде шарнирных четырехзвенников, содержащих криволинейные опоры, снабженные башмаками, свободные концы которых шарнирно соединены с корпусом, и силовой привод, кинематически связанный с шагающими движителями, снабжена установленными на корпусе шагающей опоры попарно закрепленными шагающими движителями, кинематически взаимосвязанными и жестко установленными посредством кривошипов на ведущих осях со сдвигом по фазе на половину оборота кривошипа шагающего движителя, каждый шагающий движитель снабжен механизмом установки стопы на грунт, выполненном в виде гидравлического амортизатора вязкого сопротивления, шарнирно закрепленного к проушине башмака и шарнирно присоединенного к криволинейной опоре каждого шагающего движителя, соединенной посредством кривошипа и качающегося рычага с корпусом шагающей опоры.
Предложенная новая конструктивная система взаимодействия попарно скомпонованных шагающих движителей позволяет реализовать принципиально новые типы походок шагающей опоры с дополнительной фазой опоры на пятку башмака, что снижает неравномерность прямолинейного передвижения и вертикальные колебания корпуса.
Введение в шагающую опору дополнительных новых механизмов установки стопы на грунт позволяет шагающей опоре преодолевать препятствия, превосходящие по высоте величину подъема опорных точек шагающих движителей, что обеспечивает повышенную профильную проходимость многоопорного транспортного средства с предложенными шагающими опорами.
Создание дополнительной нежесткой связи башмаков и криволинейных опор шагающих движителей, осуществляемых посредством демпферов вязкого сопротивления, позволяет обеспечить безударное взаимодействие стопы с грунтом, улучшить адаптацию башмаков шагающей опоры к неровностям грунта и повысить профильную проходимость транспортного средства.
Проведенный заявителем анализ уровня техники, включающий поиск по патентам и научно-техническим источникам информации и выявление источников, содержащих сведения об аналогах заявленного изобретения, позволил установить, что заявителем не обнаружен аналог, характеризующийся признаками, идентичными всем существенным признакам заявленного изобретения, а определение из перечня выявленных аналогов прототипа как наиболее близкого по совокупности признаков аналога позволил выявить совокупность существенных по отношению к усматриваемому техническому результату отличительных признаков в заявленном объекте, изложенных в формуле изобретения.
Следовательно, заявленное изобретение соответствует требованию "новизна" по действующему законодательству.
Для проверки соответствия заявленного изобретения требованию уровня заявитель провел дополнительный поиск известных решений с целью выявления признаков, совпадающих с отличительными от прототипа признаками заявленного изобретения, результаты которого показывают, что заявленное изобретение не следует для специалиста явным образом из известного уровня техники.
Следовательно, заявленное изобретение соответствует требованию "изобретательский уровень".
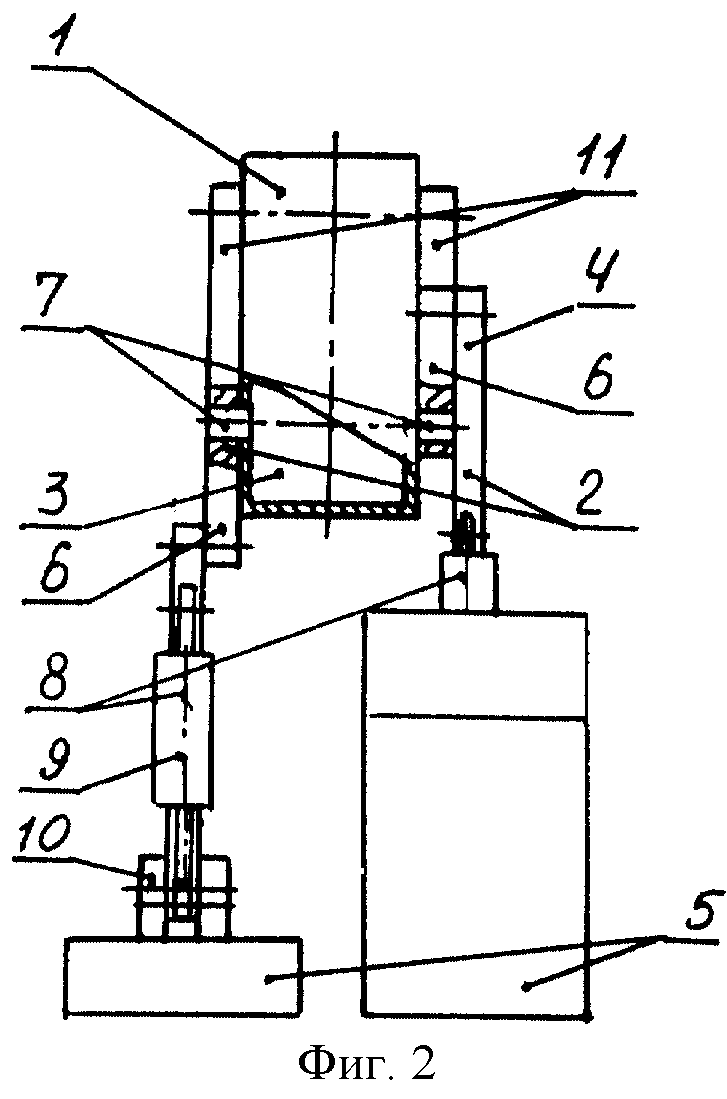
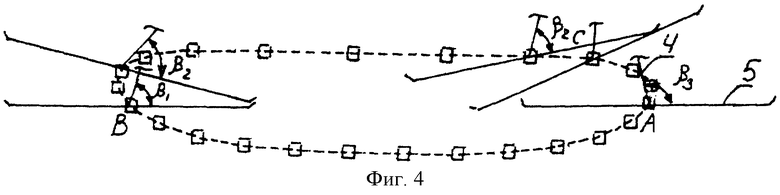
На фиг.1 представлен общий вид шагающей опоры; фиг.2 - вид слева на шагающую опору; фиг.3 - траектория опорных точек шагающих движителей и положение башмаков на ее характерных участках при движении шагающей опоры вперед; фиг.4 - траектория опорных точек шагающих движителей и положение башмаков на ее характерных участках при движении шагающей опоры задним ходом.
Шагающая опора для транспортных средств повышенной проходимости содержит корпус 1 с установленными на нем шагающими движителями 2, и силовой привод 3, кинематически связанный с шагающими движителями 2 (фиг.1, 2).
Шагающие движители 2 выполнены в виде шарнирных четырехзвенников и содержат криволинейные опоры 4, снабженные башмаками 5. Свободные концы криволинейных опор 4 шарнирно соединены с корпусом 1. Шагающие движители 2 попарно закреплены на корпусе 1 шагающей опоры, кинематически взаимосвязаны и жестко установлены посредством кривошипов 6 на ведущих осях 7. Для чередования опорной фазы и фазы переноса шагающие движители 2 установлены со сдвигом по фазе на половину оборота кривошипа 6.
Для обеспечения походки шагающей опоры с дополнительной фазой опоры на пятку башмака 5 и плавной сменой стоп каждый шагающий движитель 2 снабжен механизмом установки стопы на грунт 8, выполненном в виде гидравлического амортизатора вязкого сопротивления 9, шарнирно закрепленного к проушине 10 башмака 5 и шарнирно присоединенного к криволинейной опоре 4 каждого шагающего движителя 2 (фиг.1-4). Криволинейные опоры 4, в свою очередь, соединены посредством кривошипов 6 и качающихся рычагов 11 с корпусом 1 шагающей опоры.
Предложенная взаимосвязь шагающих движителей 2 обеспечивает снижение потерь на ударное взаимодействие стопы с грунтом, уменьшает неравномерность прямолинейного движения, вертикальные колебания корпуса и энергозатраты, связанные с ними, а также повышает профильную проходимость транспортного средства, позволяя преодолевать препятствия, превосходящие по высоте величину подъема опорных точек шагающих движителей.
Силовой привод 3 может включать в себя тяговый электродвигатель 12 с бортовым редуктором 13 или иметь другие примеры выполнения (фиг.1, 2). Силовой привод 3 через бортовой редуктор 13 кинематически связан с кривошипами 6 шагающих движителей 2.
Шагающая опора для транспортных средств повышенной проходимости работает следующим образом. После включения силового привода 3 крутящий момент от тягового электродвигателя 12 через бортовой редуктор 13 передается на ведущую ось 7 и кривошипы 6 каждой пары шагающих движителей 2 (фиг.1, 2). Кривошипы 6 шагающих движителей 2 начинают вращаться и приводят в движение криволинейные опоры 4 и качающиеся рычаги 11, тем самым осуществляя движение шагающих движителей 2. Поскольку шагающие движители 2 попарно установлены на корпусе 1 со сдвигом по фазе между собой на половину оборота кривошипа 6, то как минимум один из башмаков 5 каждой пары шагающих движителей 2 находится в фазе опоры на грунт. Благодаря взаимодействию башмаков 5 с грунтом шагающая опора начинает движение.
При движении шагающей опоры каждая пара шагающих движителей 2 последовательно совершает рабочий цикл, включающий рабочий ход, соответствующий участку АВ траектории опорной точки, фазу переноса, соответствующую участку ВС траектории и переходный участок СА, соответствующий фазе опоры на пятку башмака 5 (фиг.3, 4).
Каждую половину рабочего цикла можно подразделить на следующие четыре основные стадии:
- первый шагающий движитель находится в фазе опоры на грунт в начале рабочего участка АВ траектории опорной точки (фиг.3 - при движении вперед и фиг.4 - при движении задним ходом) и осуществляет рабочий ход, второй - движется по участку ВС и находится в начале фазы переноса;
- первый шагающий движитель продолжает находиться в фазе опоры на грунт, второй - проходит точку С траектории, плавно входит пяткой башмака 5 в зацепление с грунтом и начинает совместно с первым шагающим движителем осуществлять рабочий ход;
- первый шагающий движитель проходит точку В и начинает фазу переноса, второй - продолжает движение по участку СА траектории, опирается на грунт пяткой башмака 5 и осуществляет рабочий ход;
- первый шагающий движитель продолжает находиться в фазе переноса, второй - начинает опираться на грунт всей поверхностью башмака 5, обеспечивает рабочий ход и приближается к точке А траектории.
После достижения опорной точкой второго шагающего движителя 2 точки А траектории начинается вторая половина рабочего цикла, аналогичная первой. При этом первый шагающий движитель меняется местом со вторым.
При движении шагающей опоры механизм установки стопы на грунт 8 работает следующим образом. При выходе башмака 5 из фазы опоры на грунт, в точке В траектории, он расположен под углом α1 к криволинейной опоре 4 (фиг.3). В дальнейшем, в фазе переноса - участок ВС траектории, сила вязкого сопротивления в гидравлическом амортизаторе 9 препятствует повороту башмака 5 вокруг своей оси, угол α1 сохраняется и носок башмака 5 при переносе (см. фиг. 3) всегда приподнят.
Если у шагающей опоры при сравнительно малой высоте подъема опорных точек шагающего движителя 2 башмаки 5 повышенной длины, то в начале фазы переноса возможен контакт пятки башмака 5 с грунтом и он повернется. Угол α1 уменьшится до α2, но и в этом случае носок башмака 5 в фазе переноса будет приподнят.
После окончания фазы переноса, на участке СА траектории, башмак 5 опускается на грунт с приподнятым носком, что позволяет шагающей опоре преодолевать препятствия высотой более величины подъема опорных точек шагающего движителя 2, проходит точку С траектории и плавно входит своей пяткой в зацепление с грунтом.
В фазе опоры шагающего движителя 2 на пятку башмака 5, участок СА траектории, башмак 5, под действием силы тяжести шагающей опоры, поворачивается и устанавливается на грунте всей своей опорной поверхностью. При этом, за сравнительно короткое время, угол α2 уменьшится до α3. На этом участке относительная угловая скорость башмака 5 по отношению к опорной точке шагающего движителя (оси вращения башмака 5) принимает максимальные значения. Максимальна и сила вязкого сопротивления в гидравлическом амортизаторе 9. В результате на стопе возникает значительный опорный момент и она, в фазе опоры на пятку башмака 5, воспринимает часть нагрузки на шагающую опору. Это обеспечивает плавную смену стоп и снижение потерь на ударное взаимодействие стопы с грунтом.
В фазе опоры шагающего движителя 2 на грунт, участок АВ траектории, относительная угловая скорость башмака 5 по отношению к опорной точке шагающего движителя 2 незначительна, поэтому потери в гидравлическом амортизаторе вязкого сопротивления 9 не оказывают существенного влияния на общие потери мощности.
Аналогично механизм установки стопы на грунт работает и при движении задним ходом (фиг.4). В этом случае поворот башмака от угла β1, соответствующему выходу из фазы опоры на грунт, до угла β2 происходит в начале участка ВС траектории при выходе из зацепления с грунтом, за счет контакта носка башмака 5 с грунтом (из зацепления выходит сначала пятка, а потом носок башмака 5).
После завершения рабочего цикла шагающей опоры он повторяется.
Подобный новый рабочий цикл шагающих движителей 2 шагающей опоры обеспечивает принципиально новую походку с дополнительной фазой опоры на пятку башмака 5 и плавной сменой стоп, что приводит к снижению потерь на ударное взаимодействие стопы с грунтом, улучшенной адаптации башмаков 5 шагающей опоры к неровностям грунта и повышенной профильной проходимости транспортного средства, за счет возможности преодолевания препятствий, превосходящих по высоте величину подъема опорных точек шагающих движителей, и снижает неравномерность прямолинейного движения, вертикальные колебания корпуса и энергозатраты, связанные с ними.
Таким образом, вышеуказанные сведения свидетельствуют о выполнении при использовании изобретения следующей совокупности условий:
шагающая опора для транспортных средств повышенной проходимости предназначена для применения в многоопорных транспортных средствах, работающих на экологически ранимых и с низкой несущей способностью грунтах, причем новая конструктивная система взаимодействия попарно закрепленных шагающих движителей, снабженных новым механизмом установки стопы на грунт, обеспечивает безударное взаимодействие стопы с грунтом и повышенную профильную проходимость шагающей опоры;
для заявленного изобретения в том виде, как оно охарактеризовано в формуле изобретения, подтверждена возможность его осуществления с помощью вышеописанных конструктивных решений и способов применения;
шагающая опора для транспортных средств повышенной проходимости, воплощенная в заявленном изобретении, при его осуществлении способна обеспечить достижение усматриваемого заявителем достигаемого технического результата.
Следовательно, заявленное изобретение соответствует требованию "промышленная применимость".
| название | год | авторы | номер документа |
|---|---|---|---|
| ШАГАЮЩАЯ ОПОРА ДЛЯ ТРАНСПОРТНЫХ СРЕДСТВ ПОВЫШЕННОЙ ПРОХОДИМОСТИ | 2001 |
|
RU2207283C2 |
| ШАГАЮЩАЯ ОПОРА ДЛЯ ТРАНСПОРТНЫХ СРЕДСТВ ПОВЫШЕННОЙ ПРОХОДИМОСТИ | 2000 |
|
RU2174085C1 |
| ШАГАЮЩАЯ ОПОРА ПОВЫШЕННОЙ ПРОХОДИМОСТИ | 1999 |
|
RU2156712C1 |
| ШАГАЮЩАЯ ОПОРА ДЛЯ ТРАНСПОРТНЫХ СРЕДСТВ ПОВЫШЕННОЙ ПРОХОДИМОСТИ | 1999 |
|
RU2156711C1 |
| ШАГАЮЩАЯ ОПОРА ДЛЯ МНОГООПОРНЫХ ТРАНСПОРТНО-ПОГРУЗОЧНЫХ СРЕДСТВ ПОВЫШЕННОЙ ПРОХОДИМОСТИ | 2000 |
|
RU2171194C1 |
| ШАГАЮЩАЯ ОПОРА ДЛЯ ТРАНСПОРТНЫХ СРЕДСТВ ПОВЫШЕННОЙ ПРОХОДИМОСТИ | 2008 |
|
RU2368529C1 |
| ШАГАЮЩАЯ ОПОРА ДЛЯ МНОГООПОРНЫХ САМОХОДНЫХ МАШИН ТРАНСПОРТНО-ПОГРУЗОЧНЫХ СРЕДСТВ ПОВЫШЕННОЙ ПРОХОДИМОСТИ | 1998 |
|
RU2153437C2 |
| ШАГАЮЩАЯ ОПОРА ДЛЯ ТРАНСПОРТНЫХ СРЕДСТВ ПОВЫШЕННОЙ ПРОХОДИМОСТИ | 2003 |
|
RU2239577C1 |
| ШАГАЮЩАЯ ОПОРА ДЛЯ МНОГООПОРНЫХ САМОХОДНЫХ МАШИН И ДЛЯ ТРАНСПОРТНЫХ СРЕДСТВ ПОВЫШЕННОЙ ПРОХОДИМОСТИ | 2010 |
|
RU2422317C1 |
| ШАГАЮЩАЯ ОПОРА ДЛЯ ТРАНСПОРТНЫХ СРЕДСТВ ПОВЫШЕННОЙ ПРОХОДИМОСТИ | 1993 |
|
RU2063354C1 |

Шагающая опора содержит корпус с установленными на нем шагающими движителями, выполненными в виде шарнирных четырехзвенников, содержащих криволинейные опоры. Концы последних шарнирно соединены с корпусом и снабжены стопами, выполненными в виде сменных башмаков. Силовой привод кинематически связан с шагающими движителями. На корпусе шагающей опоры попарно закреплены шагающие движители, кинематически взаимосвязанные и жестко установленные посредством кривошипов на ведущих осях со сдвигом по фазе на половину оборота кривошипа шагающего движителя. Каждый шагающий движитель снабжен механизмом установки стопы на грунт, выполненным в виде гидравлического амортизатора вязкого сопротивления, шарнирно закрепленного к проушине башмака и шарнирно присоединенного к криволинейной опоре каждого шагающего движителя, соединенной посредством кривошипа и качающегося рычага с корпусом шагающей опоры. В результате повышаются проходимость и плавность хода транспортного средства. 4 ил.
Шагающая опора для транспортных средств повышенной проходимости, содержащая корпус с установленными на нем шагающими движителями, выполненными в виде шарнирных четырехзвенников, содержащих криволинейные опоры, концы которых шарнирно соединены с корпусом, снабженные стопами, выполненными в виде сменных башмаков, и силовой привод, кинематически связанный с шагающими движителями, отличающаяся тем, что на корпусе шагающей опоры попарно закреплены шагающие движители, кинематически взаимосвязанные и жестко установленные посредством кривошипов на ведущих осях со сдвигом по фазе на половину оборота кривошипа шагающего движителя, каждый шагающий движитель снабжен механизмом установки стопы на грунт, выполненным в виде гидравлического амортизатора вязкого сопротивления, шарнирно закрепленного к проушине башмака и шарнирно присоединенного к криволинейной опоре каждого шагающего движителя, соединенной посредством кривошипа и качающегося рычага с корпусом шагающей опоры.
| ШАГАЮЩАЯ ОПОРА ДЛЯ ТРАНСПОРТНЫХ СРЕДСТВ ПОВЫШЕННОЙ ПРОХОДИМОСТИ | 1993 |
|
RU2063354C1 |
| ШАГАЮЩИЙ ДВИЖИТЕЛЬ | 1993 |
|
RU2095269C1 |
| ШАГАЮЩАЯ ОПОРА ДЛЯ МНОГООПОРНЫХ САМОХОДНЫХ МАШИН И ДЛЯ ТРАНСПОРТНЫХ СРЕДСТВ ПОВЫШЕННОЙ ПРОХОДИМОСТИ | 1993 |
|
RU2063353C1 |
| ШАГАЮЩАЯ ОПОРА ДЛЯ ТРАНСПОРТНЫХ СРЕДСТВ ПОВЫШЕННОЙ ПРОХОДИМОСТИ | 1999 |
|
RU2156711C1 |
| US 4202423 A, 13.05.1980 | |||
| WO 9203328 A1, 05.03.1992 | |||
| DE 4028773 A1, 18.04.l991 | |||
| US 4779691 A, 18.04.1991. | |||
