(54) КОНВЕЙЕРНЫЕ ВЕСЫ

| название | год | авторы | номер документа |
|---|---|---|---|
| Конвейерные весы | 1987 |
|
SU1522044A1 |
| Способ весового непрерывногодОзиРОВАНия СыпучиХ МАТЕРиАлОВ | 1979 |
|
SU815516A1 |
| Способ защиты ленточного конвейера от аварийного буксования | 1989 |
|
SU1779659A1 |
| Дозатор сыпучих и кусковых материалов | 1981 |
|
SU1010930A1 |
| Устройство для дистанционного автоматизированного управления шахтными конвейерными линиями | 1986 |
|
SU1579863A1 |
| Весодозировочное устройство для роторных экскаваторов | 1991 |
|
SU1816969A1 |
| Устройство для погрузки сыпучих материалов в железнодорожные транспортные средства | 1978 |
|
SU768735A1 |
| Устройство для контроля работоспособности дефектоскопов | 1990 |
|
SU1772715A1 |
| УСТРОЙСТВО для ИЗМЕРЕНИЯ ПРОИЗВОДИТЕЛЬНОСТИ РОТОРНОГО ЭКСКАВАТОРА | 1970 |
|
SU288339A1 |
| ТРАНСПОРТНОЕ СРЕДСТВО С ЭЛЕКТРОТЯГОЙ | 2000 |
|
RU2171753C1 |
1
Изобретение относится к области весоизмерительной техники, в частности к устройствам для взвешивания непрерывно поступающего груза в процессе его подачи.
Известно устройство для взвешивания материала на конвейере, содержа-, щее датчик веса и датчик скорости, подключенные через блок связи к интегратору l 3.
Недостатком этого устройства является неудовлетворительная точность измерения, обусловленная изменением в процессе работы скорости движения ленты и ее загрузки, что приводит к ложным срабатываниям схемы сравнения амплитуд в интеграторе.
Ближайшим по технической сущности и достигаемому результату к предлагаемому изобретению являются конвейерные весы, содержащие датчик,веса, датчик скорости с преобразователем , датчик угла наклона, связанный с блоком регулирования, узел сравнения, интегратор и усилительf23.
Прототип также не обеспечивает требуемую точность измерения, так как на результат измерения оказывают влияние помехи - дрейф нуля усилителя, старение элементов и т.п.
Цель изобретения - повышение точ- ности .
Цель достигается тем, что тв к6н
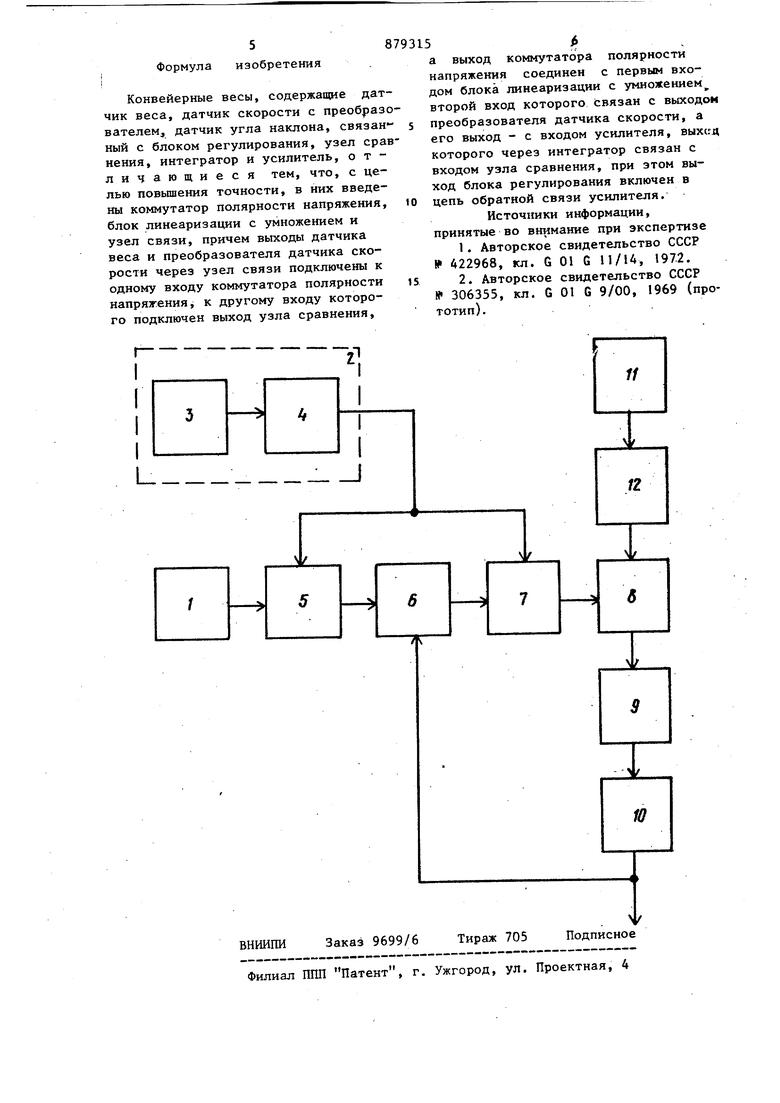
10 вейерные весы введены коммутатор полярности напряжения. блок зации с умножением узел связи, причем выходы датчика веса и преобразователя датчика скорости через узел свя15зи подключены к одному входу коммутаг тора полярности.напряжения, к другому входу которого подключен выход узла сравнения, а выход коммутатора полярности напряжения соединен с первым
К входом блока линеаризации с умножением, второй «ход которого связан с выходом преобразователя датчика скорости, а его выход - с входом усили3теля, выход которого через интеграто связан--с входом узла сравнения, при этом выход блока регулирования включен в цепь обратной связи усилителя На чертеже показана блок-схема ве сов. Конвейерные весы содержат датчик } веса, датчик 2 скорости, состояпщй из датчика 3 импульсов и преобразователя 4 Период-напряжецре, узел 5 связи, коммутатор 6 полярнос ти напряжения, блок 7 линеаризации с умножением, усилитель 8 постоянного тока, интегратор 9, узел 10 срав нения, датчик 11 угла наклона, блок 12 регулирования .обратной связи усил теля 8 Конвейерные весы работают следующим образом. Под действием материала, находяЩегося на ленте конвейера, на выходе датчика 1 веса появляется сигнал, пр порциональный весу материала на изме рительном участке ленты. При движении ленты конвейера сигнал с выхода датчика 2 скорости открывает узел 5 связи, и сигнал с выхода датчика 1 веса поступает через узел 5 связи и коммутатор 6 на блок 7 линеаризации с умноженинм. В этом блоке осуществляется исправление нелинейности датчика 2 скорости и одновременно выполнение операции определения мгновенной производительности конвейера, т.е. перемножение величины скорости ленты конвейера на сигнал, пропорциональный его погонной нагрузке. Нелинейность сигн ла на выходе датчика 2 скорости связана с тем, что его выходное напг ряжение является гиперболической функцией частоты следования импульсов. Операция линеаризации с умножением может быть осуществлена, например, с помощью управляемого делителя напряжения на полевом транзисторе, на затвор которого подается сигнал с импульсного датчика скорос а сам делитель подключен к выходу к мутатора 1на чертеже не показано. С блока 7 сигнал мгновенной производительности поступает через уси литель 8 постоянного тока, коэффи циент передачи которого корректируется блоком 12 регулирования обрат ной связи в зависимости от управляющего сигнала датчика I1 угла накло 54 на, на интегратор 9, выполненный, например, на операционном -усилителе с интегрирукнцёй емкостью. Интегратор 9 работает в режиме двуполярного интегрирования входного сигнала, т. е, при достижении выходным напряжением интегратора 9 уровня, вызывающего срабатывание узла 10 сравнения, происходит изменение полярности сигнала датчика 1 веса с помощью коммутатора 6 полярности напряжения. Это напряжение через блок 7 и усилитель 8 поступает на интегратор 9, и процесс интегрирования мег няет направление . Одновременно полярность напряжения срабатывания узла 10 сравнения переключается на противоположную для подготовки к следующему срабатыванию. Появление в контуре интегрирования систематических помех (дрейф, старение элементов и др., помехи) приводит к изменению скважиности выходных импульсов с сохранением частоты их следования, так как сигналы от помех в одном периоде интегрирования складываются с полезным сигналом, а в последующем из него вычитаются. Изменение угла наклона конвейера при постоянной его производительности приведет к тому, что датчики I веса будет воспринимать только нормальную составляющую погонного веса материала на измерительном участке ленты конвейера. Однако при этом блок 12 регулирования, связанный с датчиком 11 угла наклона, - изменяет коэффициент обратной связи усилителя 8, приводя тем самым сигнал на его выходе к значению, соответствующему действительной мгновенной производительности. Таким образом, при увеличении нагрузки на конвейерной ленте, увеличении скорости ленты конвейера или уменьшении угла наклона конвейера сигнал на входе интегратора 9 и скорость интегрирования, соответственно, растут , что приводит к повьшению частоты срабатьшания узла 10 сравнения и на выходе устройства суммарное количество импульсов будет пропорционально количеству перемещенного конвейером материала. Экономическая эффективность описанных конвейерных весов обуславливается повышением точности измерения количества перемещаемого материала.
