Изобретение относится к средствам автоматизации конвейерного транспорта и может быть использовано для автоматической защиты ленточных конвейеров от аварийного буксования.
Известен способ контроля пробуксовки ленты конвейера, реализованный в устройстве, согласно которому измеряют температуру обечайки приводного барабана, сравнивают ее с допустимым значением и, если она превышает его, вырабатывают команду на отключение привода конвейера.
К недостаткам этого способа следует отнести неудовлетворительную точность определения момента достижения критической ситуации, при которой необходимо осуществлять отключение привода. Это объясняется-вначительное инерционностью тепловых процессов, вследствие чего
при интенсивном выделении тепла в зоне буксования информация от температурных датчиков существенно запаздывает относительно фактического состояния контролируемого объекта. Кроме того, этот метод оказывается весьма сложным при его реализации, так как требует размещения первичных датчиков температуры на вращающемся приводном барабане и обеспечении надежной передачи информации от них к неподвижному приемнику, установленному на ставе конвейера.
Наиболее близким к предлагаемому способу является способ, реализованный в устройстве для измерения величины проскальзывания ленты конвейера, согласно которому осуществляют измерение скорости скольжения ленты конвейера относительно поверхности приводного барабана и
V4 Ю О СЛ О
сравнивают ее с пороговым значением, ь достижении которого формируют сигнал па отключение привода конвейера.
Этому способу присущ такой существенный недостаток, как односторонняя оценка процесса буксования только по величине скорости скольжения без учета энер- ro-силовых факторов, от которых в значительной мере зависит интенсивность нагрева и износа ленты и футеровки барабана. Это приводит к неадекватной оценке ситуации, возникающей при буксовании. С одной стороны, при кратковременных пробуксовках в период пуска защита, построенная на этом принципе, может выдавать сигнал на отключение привода конвейера раньше, чем этого требует фактическое состояние параметров процесса. С другой стороны, может иметь место и обратное явление, когда при большой нагрузке на конвейер возникает длительный режим буксования, но скорость скольжения ленты при этом не достигает установленного порогового значения. В этих условиях такая защита не срабатывает, а износ оборудования (ленты и футеровки барабана) превосходит допустимые границы.
Указанные недостатки существенно снижают надежность системы защиты конвейера от аварийного буксования, построенной на основе рассмотренного способа.
Цель изобретения - повышение надежности защиты за счет исключения ложных преждевременных срабатываний в период пуска при одновременном повышении ее чувствительности к длительным пробуксовкам под нагрузкой с малыми величинами скорости скольжения ленты относительно поверхности приводного барабана.
Цель достигается за счет того, что данный способ предусматривает измерение скорости скольжения ленты относительно поверхности приводного барабана и, кроме того, в отличие от известных способов защиты, одновременно формируют дополнительный сигнал, пропорциональный силам трения в очаге буксования. Путем умножения его на сигнал скорости скольжения получают величину мощности сил трения в очаге буксования, из которой вычитают один сигнал, пропорциональный мощности потерь в окружающую среду, а другой, пропорциональный мощности, выносимой из очага буксования движущейся лентой. Путем интегрирования результирующего сигнала получают величину работы сил трения, поглощенную в очаге буксования, последнюю сравнивают с допустимым значением и в случае его превышения вырабатывают сигнал на отключение привода конвейера.
ДоПОЛИИГйЛ Мие lit, ИЧ ,о t48 .hofu L .,
соба заключается в том, что сигнал, пропорциональный мощности, выносимой из очага буксования движущейся лентой, формируют путем перемножения сигналов, пропорциональных скорости движения ленты конвейера и количеству энергии, поглощенной в очаге буксования.
В основе изобретения лежит уравнение энергетического баланса для очага буксования, которое для бесконечно малого промежутка времени dt записывается в виде
Ptdt - С dA + ySAdt -i- у dt . (1) где Рт - мощность сил трения в очаге буксования;
С - коэффициент поглощения энергии барабаном и лентой;
А - энергия, поглощаемая в зоне буксования;
/3- коэффициент рассеяния энергии; (On - скорость ленты, приведенная к вращательному движению барабана;
у- коэффициент поглощения энергии лентой.
Переходя к нормальной форме Коши, из выражения (1) получаем дифференциальное уравнение
(Рт-/ А-уАйЛ,),
решение которого позволяет определить величину энергии сил трения А, поглощенную в очаге буксования. Сравнивая ее с допустимым значением Адоп, в случае превышения заданного уровня вырабатывают команду на отключение привода конвейера.
Сигнал, пропорциональный мощности сил трения, в очаге буксования формируют на основе зависимости
Рт FT Re -COCK,
где FT - сила трения на поверхности приводного барабана при буксовании;
Re - радиус барабана;
0)ск приведенная к вращательному движению скорость скольжения ленты относительно поверхности приводного барабана.
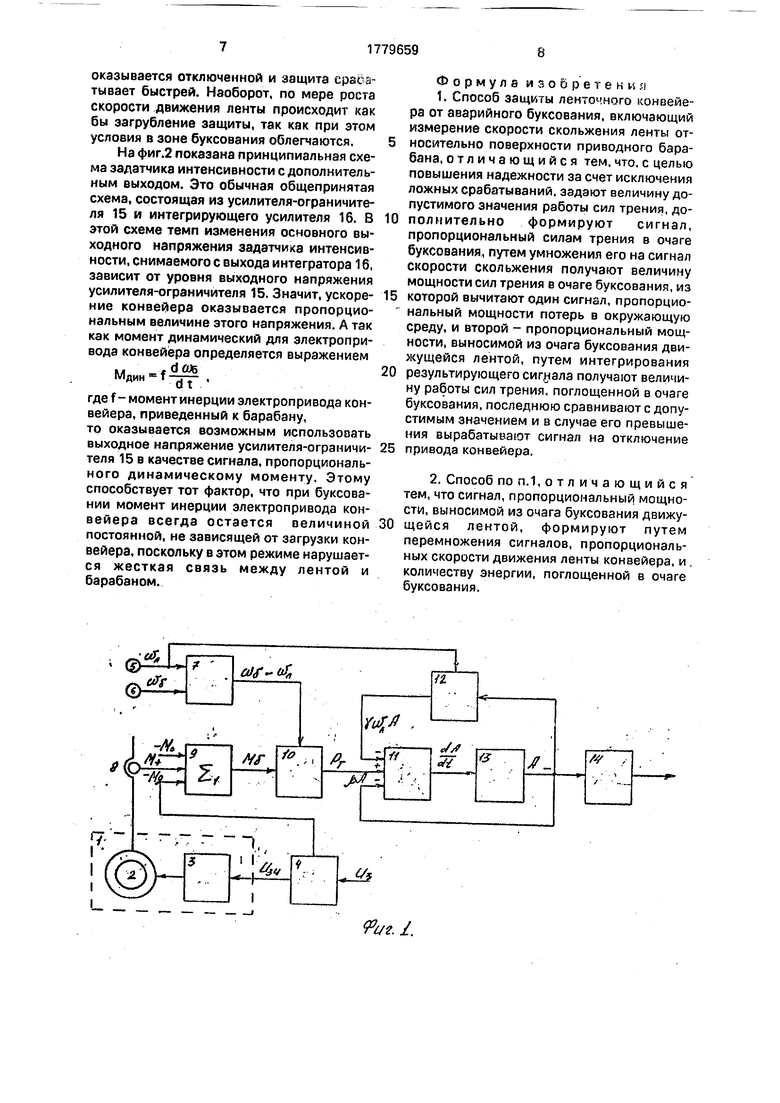
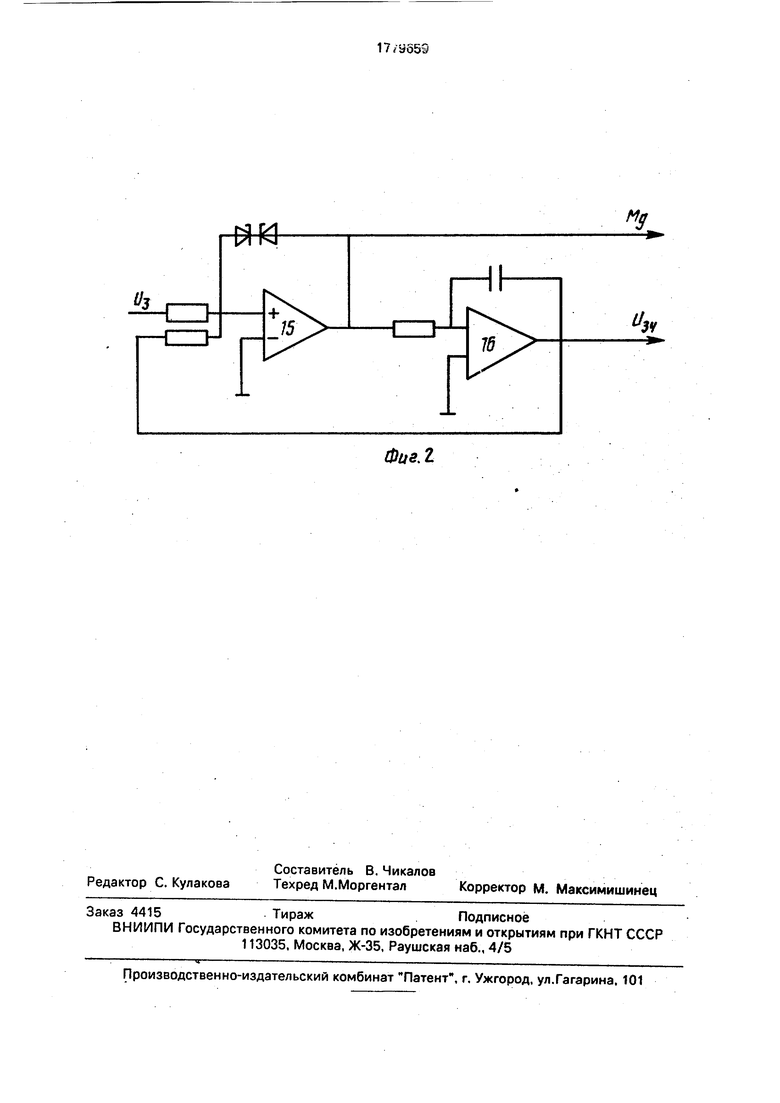
На фиг.1 показана принципиальная схема устройства защиты ленточного конвейера от аварийного буксования, реализующая 0 данный способ; на фиг.2 - принципиальная схема задатчика интенсивности с дополнительным выходом.
Устройство защиты ленточного конвейера от аварийного буксования содержит регулируемый электропривод 1, включающий в себя приводной электродвигатель 2 конвейера с системой 3 управления, причем электродвигатель 2 подключен к силовому выходу системы 3 управления. К управляю0
5
0
5
0
5
0
5
5
щему входу регулируемого электропривода 1 основным выходом подключен задатчик4 интенсивности, имеющий дополнительный выход. Входящие в состав устройства датчики скорости ленты 5 и скорости барабана 6 выходами подключены к блоку 7 измерения скорости скольжения ленты. Введенный в состав устройства датчик 8 момента электродвигателя подключен выходом к одному из входов первого сумматора 9, другой вход которого соединен с промежуточным выходом задатчика 4 интенсивности, а на третий вход подан сигнал коррекции. Выход первого сумматора 9 подключен к первому входу первого перемножителя 10, который вто- рым входом соединен с выходом блока 7 измерения скорости скольжения ленты. Выход первого перемножителя 10 связан с первым входом второго сумматора 11, второй вход которого подключегн к выходу вто- рого перемножителя 12, входы которого связаны с выходами датчика 5 скорости ленты и интегратора 13, входом подключенного к выходу второго сумматора 11. Третий вход второго сумматора 11 соединен с выходом интегратора 13, к которому подключен пороговый элемент 14.
Устройство защиты ленточного конвейера от аварийного буксования работает следующим образом.
В процессе пуска или работы конвейера источником механической энергии является регулируемый электропривод 1, состоящий из электродвигателя 2 системы 3 управления, при этом выходные сигналы датчиков скорости ленты 5 и барабана 6 непрерывно поступают на входы блока 7 измерения скорости скольжения ленты, на выходе которогоформируетсянапряжение, пропорциональное разности сигналов от датчиков скорости. При отсутствии буксования оно равно нулю. В то же время с помощью датчика 8 момента непрерывно измеряется момент приводного электродвигателя 2 конвейера. Выходное напряже- ние датчика 8 момента подается на первый вход первого сумматора 9. промежуточном выходе задатчика 4 интенсивности на- пряжение, пропорциональное динамическому моменту электродвигателя, формируется только в периоды пуска и торможения конвейера. Будучи поданным на второй вход первого сумматора 9, оно в период пуска уменьшает выходное напряжение последнего на величину, пропорцио- нальную динамическому моменту, позволяя получить сигнал, пропорциональный статическому моменту. Благодаря поступающему на третий вход первого сумматора 9 напряжению коррекции, пропорциональному моменту холостого хода привода барабаня, окончательно на выходе этого сумматора получается сигнал, пропорциональный моменту, приложенному к приводному барабану со стороны ленты. При возникновении пробуксовки этот момент определяется силами трения между лентой и барабаном.
На входы первого перемножителя 10 поступают выходные напряжения первого сумматора 9 и блока измерения скорости скольжения ленты. В нормальном режиме работы при отсутствии буксования последнее равно нулю, поэтому и выходное напряжение первого перемножителя 10 также равно нулю. В этих условиях последовательно включенные второй сумматор 11 и интегратор 13 оказываются охваченными двумя цепочками отрицательной обратной связи. Одна из них образована связью, непосредственно передающей сигнал с выхода интегратора 13 на третий вход второго сумматора 11, а другая осуществляется через второй перемножитель 12. Поэтому при отсутствии буксования выходное напряжение интегратора 13 стремится к нулю. Это приводит к тому, что пороговый элемент 14 находится в исходном состоянии и выдает сигнал, разрешающий работу приводного электродвигателя 2 конвейера.
При возникновении буксования на выходе блока 7 измерения скорости скольжения появляется сигнал, отличный от нуля, в результате чего на выходе первого перемножителя 10 формируется напряжение, пропорциональное мощности буксования, Будучи поданным через второй сумматор 11 на вход интегратора 13, оно вызывает рост его выходного напряжения, характеризующего количество энергии, накапливающейся в зоне буксования. Однако темп ее накопления и конечное установившееся значение зависят не только от величины мощности буксования, но и от потерь энергии в окружающую среду, что воспроизводится в устройстве путем подачи части сигнала с выхода интегратора 13 по цепи отрицательной обратной связи непосредственно на третий вход второго сумматора 11. Кроме того, часть энергии, выделившейся в зоне буксования, уносится движущейся конвейерной лентой. Этот процесс воспроизводится с помощью передачи части выходного сигнала интегратора 13 через перемножитель 12 на второй вход второго сумматора 11. Благодаря тому, что на второй вход перемножителя 12 подается напряжение, пропорциональное скорости движения ленты, интенсивность действия этой связи напрямую связана с этим параметром. Так, при неподвижной конвейерной ленте эта связь
оказывается отключенной и защита ераез- тывает быстрей. Наоборот, по мере роста скорости движения ленты происходит как бы загрубление защиты, так как при этом условия в зоне буксования облегчаются.
На фиг.2 показана принципиальная схема задатчика интенсивности с дополнительным выходом. Это обычная общепринятая схема, состоящая из усилителя-ограничителя 15 и интегрирующего усилителя 16. В этой схеме темп изменения основного выходного напряжения задатчика интенсивности, снимаемого с выхода интегратора 16, зависит от уровня выходного напряжения усилителя-ограничителя 15. Значит, ускорение конвейера оказывается пропорциональным величине этого напряжения. А так как момент динамический для электропривода конвейера определяется выражением
М . f d °
МДин ,
где f- момент инерции электропривода конвейера, приведенный к барабану, то оказывается возможным использовать выходное напряжение усилителя-ограничителя 15 в качестве сигнала, пропорционального динамическому моменту. Этому способствует тот фактор, что при буксовании момент инерции электропривода конвейера всегда остается величиной постоянной, не зависящей от загрузки конвейера, поскольку в этом режиме нарушается жесткая связь между лентой и барабаном.
Формуле изобретения
1.Способ защиты ленточного конвейера от аварийного буксования, включающий измерение скорости скольжения ленты относительно поверхности приводного барабана, отличающийся тем.что.с целью повышения надежности за счет исключения ложных срабатываний, задают величину допустимого значения работы сил трения, дополнительно формируют сигнал, пропорциональный силам трения в очаге буксования, путем умножения его на сигнал скорости скольжения получают величину мощности сил трения в очаге буксования, из
которой вычитают один сигнал, пропорцио- нальный мощности потерь в окружающую среду, и второй - пропорциональный мощности, выносимой из очага буксования движущейся лентой, путем интегрирования
результирующего сигнала получают величину работы сил трения, поглощенной в очаге буксования, последнюю сравнивают с допустимым значением и в случае его превышения вырабатывают сигнал на отключение
привода конвейера.
2,Способ по п. 1,отличающийся тем, что сигнал, пропорциональный мощности, выносимой из очага буксования движущейся лентой, формируют путем перемножения сигналов, пропорциональных скорости движения ленты конвейера, и. количеству энергии, поглощенной в очаге буксования.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для моделирования привода конвейера | 1990 |
|
SU1762314A1 |
| Способ контроля грузонесущей способности ленточного конвейера | 1989 |
|
SU1685834A1 |
| Устройство для защиты от боксования и юза колесной пары электроподвижного состава | 1984 |
|
SU1222583A1 |
| Устройство для защиты от буксования и юза колесных пар электровоза | 1987 |
|
SU1438976A1 |
| Устройство для моделирования упруговязкой фрикционной пары | 1990 |
|
SU1780091A1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ДВИЖЕНИЕМ ТРАНСПОРТНОГО СРЕДСТВА | 2001 |
|
RU2187437C1 |
| Устройство для моделирования жесткой фрикционной муфты | 1990 |
|
SU1817112A1 |
| Стенд для испытания транспортных средств | 1990 |
|
SU1753328A1 |
| Конвейерные весы | 1987 |
|
SU1522044A1 |
| Реле пробуксовки ленточного конвейера | 1972 |
|
SU472076A2 |
Область применения - автоматизация конвейерного транспорта. Цель - повышение надежности за счет исключения ложных срабатываний. Измеряют скорость скольжения ленты относитель .э поверхности приводного барабана, задают допустимое значение величины работы сил трения, формируют сигнал, пропорциональный силам трения в очаге буксования, путем умножения его на сигнал скорости скольжения получают величину мощности сил трения в очаге буксования, из которой вычитают один сигнал, пропорциональный мощности потерь в окружающую среду, а другой, пропорциональный мощности, выносимой из очага буксования движущейся лентой, путем интегрирования результирующего сигнала получают величину работы сил трения, поглощенной в очаге буксования, последнюю сравнивают с допустимым значением и в случае его превышения вырабатывают сигнал на отключение привода конвейера. 1 з.п. ф-лы, 2 ил. (Л
I
Put. /
Фцг.1
| Устройство для измерения величины проскальзывания ленты конвейера | 1982 |
|
SU1027116A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
