Фиг: 1
Изобретение относится к дозированнойпроизводительности; индикационное табло
загрузке единичных емкостей, в частностисумматора (фактической загрузки вагона)
железнодорожных полувагонов, роторными18; блок сравнения 19, в котором сравниваэкскаваторами и может найти применение вются значения электрического сигнала, поугольной, горнорудной и других отраслях5 ступающего с интегратора 13 и задатчика
горнодобывающей промышленности.дозы 20, электрический сигнал с задатчика
Цель изобретения - повышение точно-дозы будет соответствовать заданной дозе,
сти дозированной загрузки единичных ем-которая зависит от вместимости загружаекостей роторными экскаваторами.мого вагона; элемент временной задержки
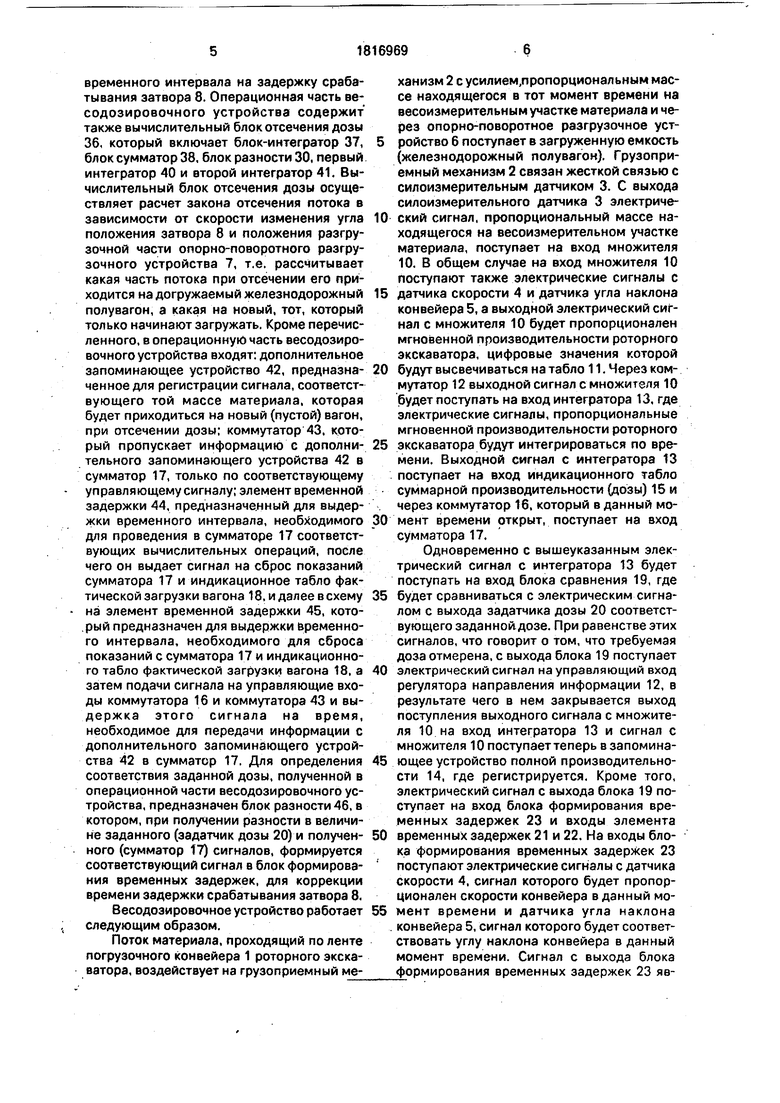
На фиг. 1 представлена структурная схе-Ю 21, предназначенный для выдержки интерма предлагаемого весодозировочного уст-вала времени, необходимого для записи
ройства для роторных экскаваторов.электрических сигналов с множителя 10 в
Весодозировочное устройство для ро-запоминающее устройство полной произво- торных экскаваторов содержит установлен-днтельности 14 и соответствующему време- ные на непрерывно движущемся конвейере15 ни, равному максимальному времени 1 конвейерные весы с измерительной час-срабатывания затвора 8, т.е. максимально- тью, включающей в себя грузоприемный ме-му,времени отсечения потока материала; ханизм 2 с силоизмерительным датчиком 3,элемент временной задержки 22, предназ- датчик скорости 4 и датчик угла наклонакаченный для задержки временного интерконвейера 5. Кроме того, весодозировочное20 вала, равного, примерно, половине устройство содержит опорно-поворотноевременного интервала элемента 21, и после- разгрузочное устройство 6 с подвижнойдующей выдачи сигнала сброса на ноль, т.е. разгрузочной частью 7 и приводом поворота очистке интегратора 13 и закрытии комму- нижней части, затвор (шибер) 8 с приводомтатора 16; блок формирования временных 9. Опорно-поворотное разгрузочное устрой-25 задержек 23, включающий в себя первый 24 ство предназначено для непрерывной за-и второй 25 коммутаторы, первый 26 и вто- грузки транспортируемым материаломрой 27 вычислительные элементы .сумматор конечных емкостей. Опорно-поворотное28, счетчик времени 29, блок сравнения 30, разгрузочное устройство позволяет перехо-коммутатор 31 и элеменv временной задер- дить при загрузке вагонов от одного (запол-30 жки 32. Блок формирования временных за- ненного) вагона к другому (которыйдержек 23 предназначен для задержки необходимо заполнить) без остановки по-сигнала на начало перемещения шибера 8 грузочного конвейера. Подвижная разгру-на временный интервал, необходимый для зочная часть этого устройства необходиматого, что измеренный и учтенный материал вследствие того, что взаимное положение35 дошел от точки измерения, т.е. фузоприем- погрузочной стрелы экскаватора и загружа-ного механизма 2, до точки отсечения, т.е. емого вагона может быть различным, а сзатвора 8. Временной интервал, рассчиты- помощью регулирования положения погру-ваемый в блоке формирования временных зочной стрелы и нижней части опорно-пово-задержек 23,зависит от скорости конвейера ротного устройства достигается40 в соответствующий момент времени, поло- направленность потока материала в нуж-жения разгрузочной части 7 опорно-пово- ную часть железнодорожного полувагона.ротного разгрузочного устройства и
Важнейшей частью весодозировочногоположения затвора 8. Выходной сигнал блоустройства является операционное устрой-ка формирования временных задержек 23
ство. Операционное устройство включает в45 является управляющим для запоминающего
себя множитель 10 с индикационным таблоустройства полной производительности 14
11, являющимися известными устройства-и блока управления приводом затвора 33. В
ми; коммутатор 12, основной функцией ко-измерительную часть весодозировочного
торого является направление информации вустройства вводятся датчик положения нижзависимости от поступающей команды либо50 ней (разгрузочной) части опорно-поворотв интегратор 13, либо в запоминающее уст-кого разгрузочного устройства 34,
ройство полной производительности 14; ин-предназначенный для регистрации положедикационное табло суммарнойния разгрузочной части в плане по отношепроизводительности (дозы) 15; коммутаторнию к погрузочному конвейеру, и датчик
16, основная функция которого - пропу-55 угла поворота затвора (шибера) 35, предназскать или же прекращать выход информа-каченный для определения изменения угла
ции с интегратора 13 в зависимости отположения затвора 8 и положения котором
поступившей команды; сумматор 17, основ-затвор 8 находится в соответствующий моной функцией которого является суммиро-мент, с целью определения закона отсечевание дискретных значенийния потока (т.е. дозы) и корректировки
временного интервала на задержку срабатывания затвора 8. Операционная часть ве- содозировочного устройства содержит также вычислительный блок отсечения дозы 36, который включает блок-интегратор 37, блок сумматор 38, блок разности 30, первый интегратор 40 и второй интегратор 41. Вычислительный блок отсечения дозы осуществляет расчет закона отсечения потока в зависимости от скорости изменения угла положения затвора 8 и положения разгрузочной части опорно-поворотного разгрузочного устройства 7, т.е. рассчитывает какая часть потока при отсечении его приходится на догружаемый железнодорожный полувагон, а какая на новый, тот, который только начинают загружать. Кроме перечисленного, в операционную часть весодозиро- вочногоустройства входят: дополнительное запоминающее устройство 42, предназначенное для регистрации сигнала, соответствующего той массе материала, которая будет приходиться на новый (пустой) вагон, при отсечении дозы; коммутатор 43. который пропускает информацию с дополнительного запоминающего устройства 42 в сумматор 17, только по соответствующему управляющему сигналу; элемент временной задержки 44, предназначенный для выдержки временного интервала, необходимого для проведения в сумматоре 17 соответствующих вычислительных операций, после чего он выдает сигнал на сброс показаний сумматора 17 и индикационное табло фактической загрузки вагона 18. и далее в схему на элемент временной задержки 45, кото- рый предназначен для выдержки временного интервала, необходимого для сброса показаний с сумматора 17 и индикационного табло фактической загрузки вагона 18, а затем подачи сигнала на управляющие входы коммутатора 16 и коммутатора 43 и выдержка этого сигнала на время, необходимое для передачи информации с дополнительного запоминающего устройства 42 в сумматор 17. Для определения соответствия заданной дозы, полученной в операционной части весодозировочного устройства, предназначен блок разности 46, в котором, при получении разности в величине заданного (задатчик дозы 20) и полученного (сумматор 17) сигналов, формируется соответствующий сигнал в блок формирования временных задержек, для коррекции времени задержки срабатывания затвора 8.
Весодозировочное устройство работает следующим образом.
Поток материала, проходящий по ленте погрузочного конвейера 1 роторного экскаватора, воздействует на грузоприемный механизм 2 с усилием/ ропорциональным массе находящегося в тот момент времени на весоизмерительным участке материала и через опорно-поворотное разгрузочное устройство 6 поступает в загруженную емкость (железнодорожный полувагон), Грузоприемный механизм 2 связан жесткой связью с силоизмерительным датчиком 3. С выхода силоизмерительного датчика 3 электриче0 ский сигнал, пропорциональный массе находящегося на весоизмерительном участке материала, поступает на вход множителя 10. В общем случае на вход множителя 10 поступают также электрические сигналы с
5 датчика скорости 4 и датчика угла наклона конвейера 5, а выходной электрический сигнал с множителя 10 будет пропорционален мгновенной производительности роторного экскаватора, цифровые значения которой
0 будут высвечиваться на табло 11. Через коммутатор 12 выходной сигнал с множителя 10 будет поступать на вход интегратора 13, где электрические сигналы, пропорциональные мгновенной производительности роторного
5 экскаватора будут интегрироваться по времени. Выходной сигнал с интегратора 13 поступает на вход индикационного табло суммарной производительности (дозы) 15 и . через коммутатор 16, который в данный мо0 мент времени открыт, поступает на вход сумматора 17.
Одновременно с вышеуказанным электрический сигнал с интегратора 13 будет поступать на вход блока сравнения 19, где
5 будет сравниваться с электрическим сигналом с выхода задатчика дозы 20 соответствующего заданнойдозе. При равенстве этих сигналов, что говорит о том, что требуемая доза отмерена, с выхода блока 19 поступает
0 электрический сигнал на управляющий вход регулятора направления информации 12, в результате чего в нем закрывается выход поступления выходного сигнала с множителя 10 на вход интегратора 13 и сигнал с множителя 10 поступает теперь в запомина5 ющее устройство полной производительности 14, где регистрируется. Кроме того, электрический сигнал с выхода блока 19 поступает на вход блока формирования временных задержек 23 и входы элемента
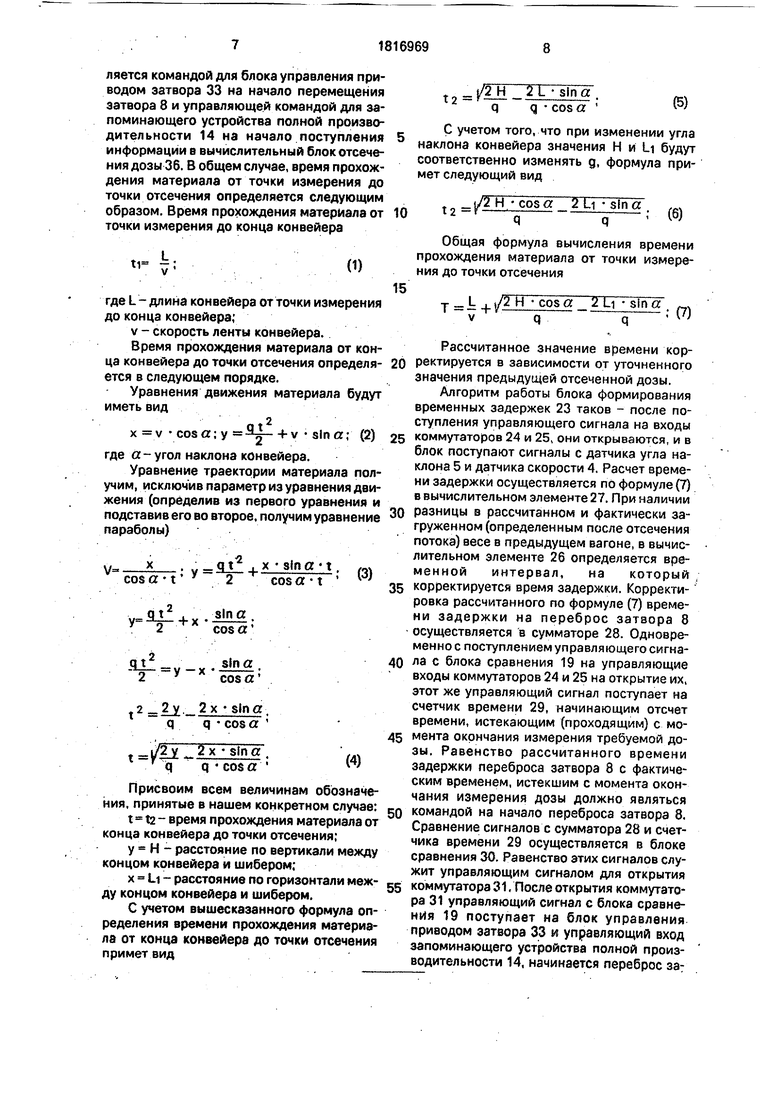
0 временных задержек 21 и 22. На входы блока формирования временных задержек 23 поступают электрические сигналы с датчика скорости 4, сигнал которого будет пропорционален скорости конвейера в данный мо5 мент времени и датчика угла наклона . конвейера 5, сигнал которого будет соответствовать углу наклона конвейера в данный момент времени. Сигнал с выхода блока формирования временных задержек 23 является командой для блока управления приводом затвора 33 на начало перемещения затвора 8 и управляющей командой для запоминающего устройства полной производительности 14 на начало поступления информации в вычислительный блок отсечения дозы 36. В общем случае, время прохождения материала от точки измерения до точки отсечения определяется следующим образом. Время прохождения материала от точки измерения до конца конвейера
t1 77
где L- длина конвейера отточки измерения до конца конвейера;
v - скорость ленты конвейера.
Время прохождения материала от конца конвейера до точки отсечения определяется в следующем порядке.
Уравнения движения материала будут иметь вид
2
х v-cosa;y -4-у slncr; (2)
где а - угол наклона конвейера.
Уравнение траектории материала получим, исключив параметр из уравнения движения (определив из первого уравнения и подставив его во второе, получим уравнение параболы)
V
х . qt%x-8lna t. (3) cos а t у 2 cos a t v
x
,
..гх 1 q
sin a
q cos a
t i/2j 2 x-sing. 1 r o. q cos a
Присвоим всем величинам обозначения, принятые в нашем конкретном случае:
- время прохождения материала от конца конвейера до точки отсечения;
у Н - расстояние по вертикали между концом конвейера и шибером;
х Li - расстояние по горизонтали между концом конвейера и шибером.
С учетом вышесказанного формула определения времени прохождения материала от конца конвейера до точки отсечения примет вид
„ t/2 Н 2 L
t2 г-- ----:
sin a
q cos a
С учетом того, что при изменении угла наклона конвейера значения Н и Li будут соответственно изменять д, формула примет следующий вид
1/2 Н cos а 2 м sin а ,,. 1Q 12 Y-----------; (6)
Общая формула вычисления времени прохождения материала от точки измерения до точки отсечения
15
т L. , /2 Н cos а 2 LI sin a t . vq q u
Рассчитанное значение времени кор20 ректируется в зависимости от уточненного значения предыдущей отсеченной дозы.
Алгоритм работы блока формирования временных задержек 23 таков - после поступления управляющего сигнала на входы
25 коммутаторов 24 и 25, они открываются, и в блок поступают сигналы с датчика угла наклона 5 и датчика скорости 4. Расчет времени задержки осуществляется по формуле (7) в вычислительном элементе 27. При наличии
30 разницы в рассчитанном и фактически загруженном (определенным после отсечения потока) весе в предыдущем вагоне, в вычислительном элементе 26 определяется временной интервал, на который
35 корректируется время задержки. Корректировка рассчитанного по формуле (7) времени задержки на переброс затвора 8 осуществляется в сумматоре 28. Одновременно с поступлением управляющего сигна40 ла с блока сравнения 19 на управляющие входы коммутаторов 24 и 25 на открытие их, этот же управляющий сигнал поступает на счетчик времени 29, начинающим отсчет времени, истекающим (проходящим) с мо45 мента окончания измерения требуемой дозы. Равенство рассчитанного времени задержки переброса затвора 8 с фактическим временем, истекшим с момента окончания измерения дозы должно являться
50 командой на начало переброса затвора 8. Сравнение сигналов с сумматора 28 и счетчика времени 29 осуществляется в блоке сравнения 30. Равенство этих сигналов служит управляющим сигналом для открытия
55 коммутатора31 .Послеоткрытия коммутатора 31 управляющий сигнал с блока сравнения 19 поступает на блок управления приводом затвора 33 и управляющий вход запоминающего устройства полной производительности 14, начинается переброс за;
твора 8 и поступление информации с запоминающего устройства полной производительности 14 в вычислительный блок отсечения дозы 36.
Одновременно с поступлением сигнала с блока сравнения 19 в блок формирования временных задержек 23 этот же сигнал поступает на входы элементов временной задержки 21 и 22, в которых выдерживаются заданные временные интервалы, а затем электрический сигнал с элемента 22 закрывает коммутатор 16 и очищает интегратор 13 и индикационное табло 15, а затем электрический сигнал с элемента 21 поступает на управляющий вход коммутатора 12, закрывает выход поступления выходного сигнала с множителя 10 на вход запоминающего устройства 14 и открывает выход поступления сигнала с множителя 10 вновь в интегратор 13.
Как уже упоминалось, после поступления сигнала на вход блок-управления приводом затвора 33, затвор 8 начинает перемещение, отсекая поток (дозу). Одновременно с этим, в вычислительный блок отсечения дозы 36 начинает поступать информация с запоминающего устройства полной производительности 14, датчика положения разгрузочной части опорно-поворотного разгрузочного устройства 34 и датчика угла поворота затвора 35, В вычислительном блоке отсечения дозы 36 осуществляется расчет закона отсечения потока материала и определение того, какая часть материала при этом попадает в догружаемый вагон, а какая часть в новый, который только будет загружаться.
Для пояснения алгоритма работы вычислительного блока отсечения дозы принимаем ряд положений:
- поток транспортируемого материала за время отсечения одной дозы от другой представляется в виде пространственного тела с объемом V;
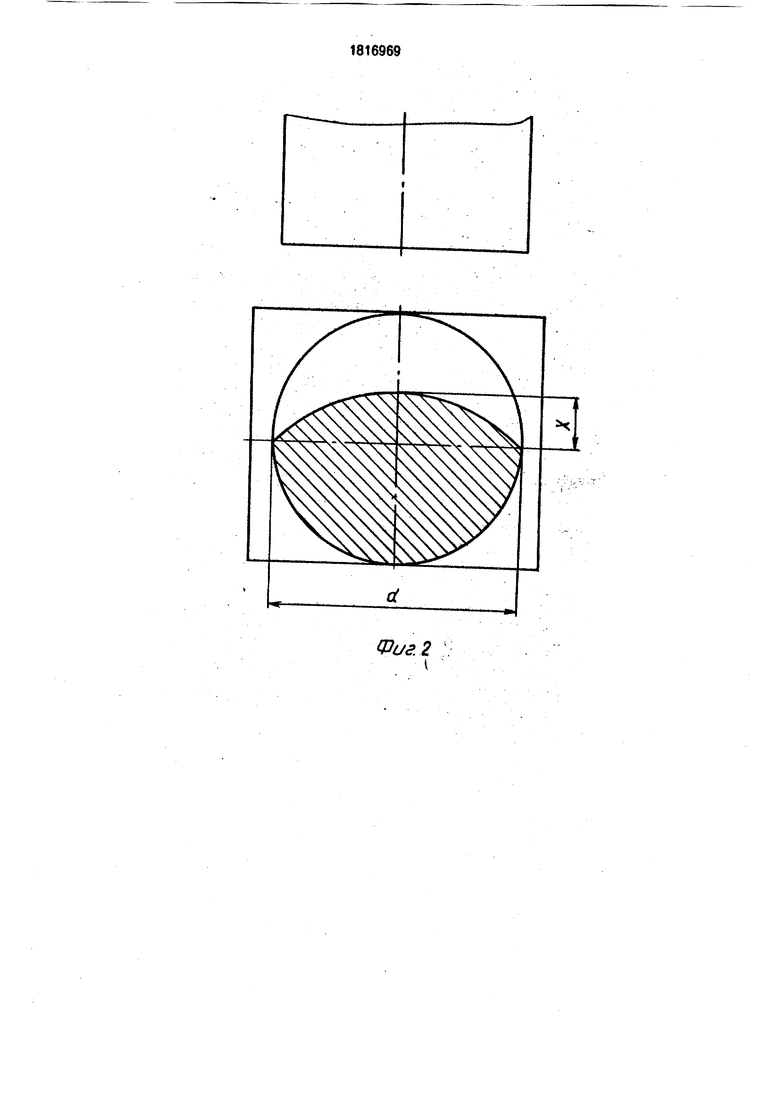
- объем этого пространственного тела будет определяться диаметром пропускного отверстия разгрузочной воронки, являющейся величиной постоянной (d), производительностью (Q) и временем поступления информации в блок 14 (t).
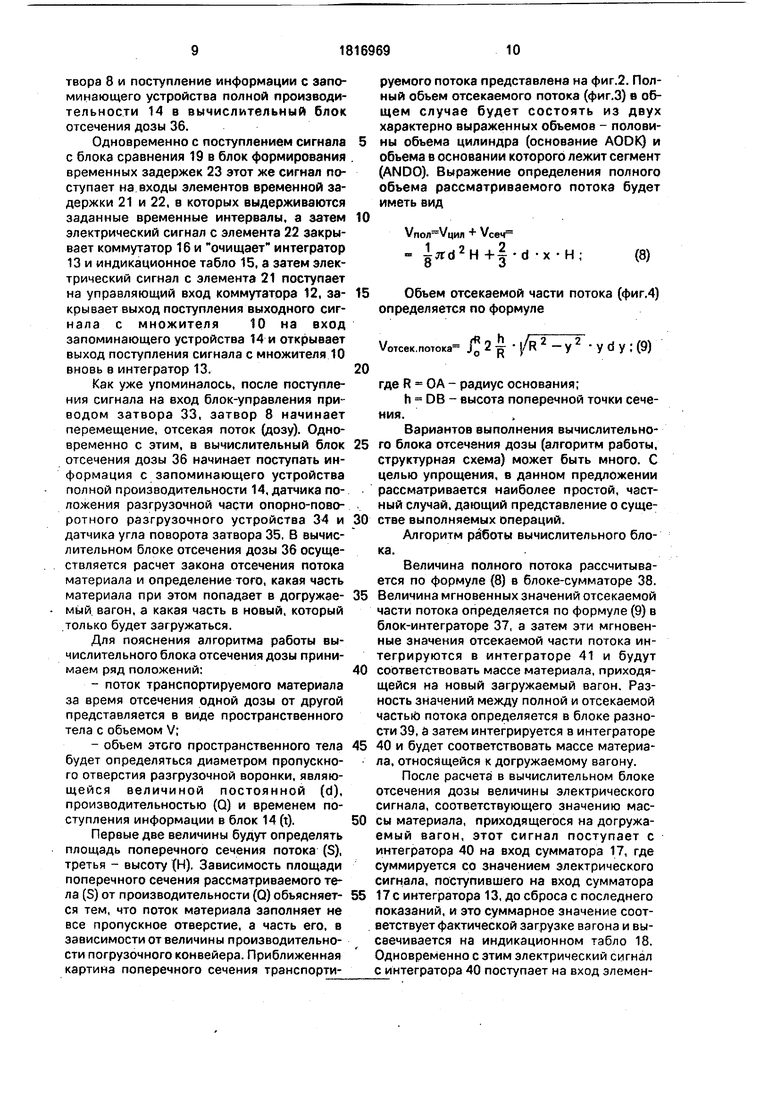
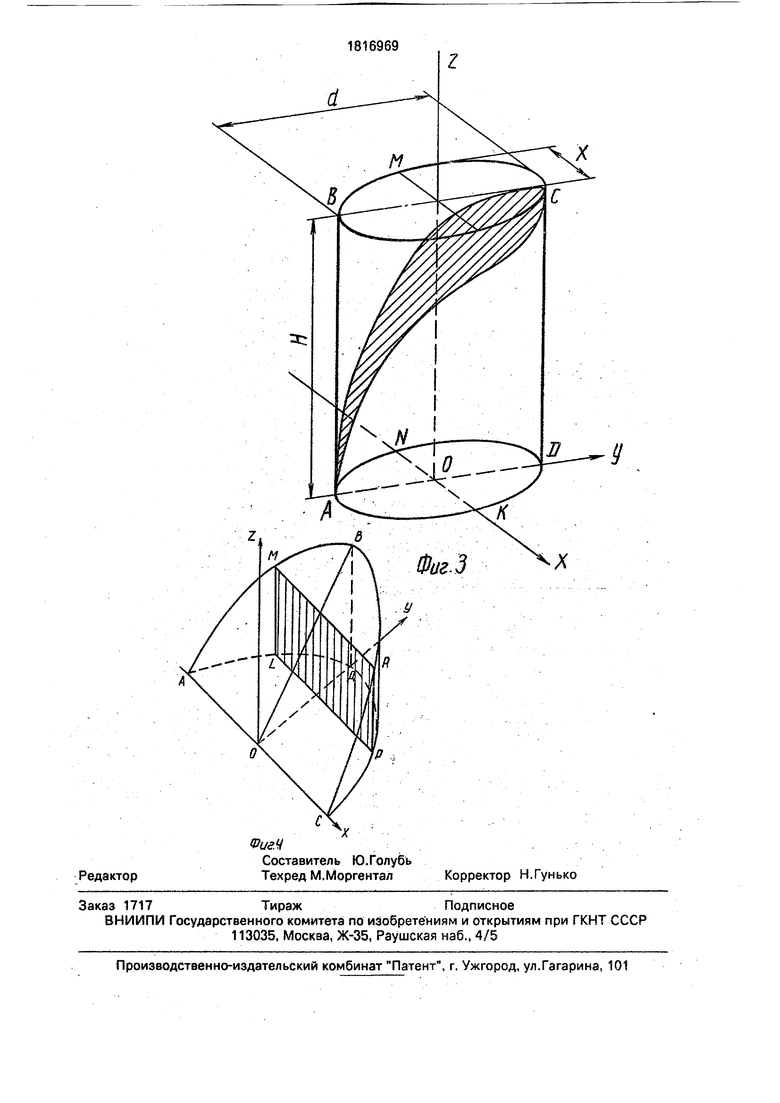
Первые две величины будут определять площадь поперечного сечения потока (S), третья - высоту (Н). Зависимость площади поперечного сечения рассматриваемого тела (S) от производительности (Q) объясняется тем, что поток материала заполняет не все пропускное отверстие, а часть его, в зависимости от величины производительности погрузочного конвейера. Приближенная картина поперечного сечения транспортируемого потока представлена на фиг.2. Полный объем отсекаемого потока (фиг.З) в общем случае будет состоять из двух характерно выраженных объемов - половины объема цилиндра (основание AODK) и объема в основании которого лежит сегмент (ANDO). Выражение определения полного объема рассматриваемого потока будет иметь вид
+ Vce4
(8)
- +| -d -x -H,15 Объем отсекаемой части потока (фиг.4) определяется по формуле
V,
отсек, потока
, j 2 -l/R2-y2 vydy:(9)где R О А - радиус основания;
h DB - высота поперечной точки сечения.
Вариантов выполнения вычислительного блока отсечения дозы (алгоритм работы, структурная схема) может быть много. С целью упрощения, в данном предложении рассматривается наиболее простой, частн ый случай, да ющий п редста вл е н ие о существе выполняемых операций.
Алгоритм работы вычислительного блока.
Величина полного потока рассчитывается по формуле (8) в блоке-сумматоре 38.
Величина мгновенных значений отсекаемой части потока определяется по формуле (9) в блок-интеграторе 37, а затем эти мгновенные значения отсекаемой части потока интегрируются в интеграторе 41 и будут
соответствовать массе материала, приходящейся на новый загружаемый вагон. Разность значений между полной и отсекаемой частью потока определяется в блоке разности 39, а затем интегрируется в интеграторе
40 и будет соответствовать массе материала, относящейся к догружаемому вагону.
После расчета в вычислительном блоке отсечения дозы величины электрического сигнала, соответствующего значению массы материала, приходящегося на догружаемый вагон, этот сигнал поступает с интегратора 40 на вход сумматора 17, где суммируется со значением электрического сигнала, поступившего на вход сумматора
17с интегратора 13, до сброса с последнего показаний, и это суммарное значение соответствует фактической загрузке вагона и высвечивается на индикационном табло 18. Одновременно с этим электрический сигнал с интегратора 40 поступает на вход элемента временной задержки 44, задерживается на временной интервал, необходимый на проведение вычислительных операций в сумматоре 17 и фиксации полученного результата, а затем сигнал с выхода элемента временной задержки 44 поступает на управляющий вход интегратора 40, очищая его, управляющий вход сумматора 17, являясь командой на чистку егол.е. выдачу сигнала, соответствующего фактической загрузке вагона на индикационное табло 18 и на вход блока разности 46, где этот сигнал сравнивается со значением сигнала задат- чи.ка доз 20, соответствующего массе заданной дозы, и на вход элемента временной задержки 45. Получаемая в блоке разности 46 поправка вводится затем в блок формирования временных задержек 23, для корректировки временного интервала задержки сигнала на перемещение затвора 8 при дозированной загрузке следующего вагона. Поступивший на вход элемента временной задержки 45 сигнал задерживается на определенное, рассчитываемое эмпирически время и затем выдается на управляющие входы интегратора 41 и блок-сумматора 38, очищая его, а также на управляющий вход коммутатора 43 и управляющий вход коммутатора 16, являясь командой на открытие коммутатора 43 и коммутатора 16 и поступления сигнала, соответствующего массе материала, приходящейся на новый загружаемый вагон при отсечении дозы с дополнительного запоминающего устройства 42 и сигнала, соответствующего массе материала измеренного конвейерными весами за промежуток времени, в котором проводились указанные выше операции с интегратора 13 на входы сумматора 17, где они суммируются. В дальнейшем цикл повторяется в соответствии с описанным выше. Необходимо только отметить, что интегратор 13 и сумматор 17 имеют возмож- ность ручного сброса показаний, задатчик дозы 20 - ручного ввода информации, а все коммутаторы - ручного ввода управляющего сигнала.
Наличие в весодозировочном устройстве для роторных экскаваторов датчика угла поворота затвора, определяющего не только положение затвора, но и скорость и ускорение изменения этого угла, датчика положения разгрузочной части опорно-поворотного разгрузочного устройства, определяющего положение разгрузочной части по отношению к погрузочному конвейеру, а также соответствующих элементов операционной части (запоминающие устройства, вычислительный блок отсечения дозы и т.д.).
позволяют определить характер отсечения одной дозы от другой и точнее определить какое количество материала придется недогружаемый вагон, а какое на следующий.
Введение в весодозировочное устройство вышеуказанных элементов дает возможность точно знать дозу материала, загружаемого в заполненный вагон и корректировать значение временной задержки на срабатывание затвора при отсечении одной дозы от другой на следующем загружаемом вагоне, позволяя тем самым повысить точность дозирования.
Ф о р му л а и з о б рете н и я
Весодозировочное устройство для роторных экскаваторов, содержащее конвейер с конвейерными весами, включающими в себя грузоприемный механизм с силоизмерительным датчиком, датчик скорости, датчик угла наклона конвейера, связанный с операционным устройством, включающим в себя множитель, интеграторы, задатчик доз, блок сравнения, блок разности, коммутаторы, элементы временной задержки и индикационное табло, опорно-поворотный разгрузочный узел с подвижной разгрузочной частью и затвором, отличающееся я тем, что, с целью повышения точности, в
него введены вычислительный блок отсечения дозы, датчик угла поворота затвора и датчик положения разгрузочной части опорно-поворотного разгрузочного устройства, выходы которых соединены соответственно .
с первым и вторым входами блок-интегратора вычислительного блока, третий вход ко- торого и вход блок-сумматора вычислительного блока соединены с выходом запоминающего устройства полной
производительности, выход блок-сумматора вычислительного блока соединен с пер- вым входом блока разности вычислительного блока, второй вход которого и вход первого интегратора вычислителького блока соединены с выходом блок-интегратора вычислительного блока, выход блока разности вычислительного блока соединен с входом второго интегратора вычислительного блока, выход первого интегратора вычислительного блока соединен с введенным запоминающим устройством, выход которого соединен с входом первого коммутатора, выход второго интегратора вычислительного блока соединен с первым
входом сумматора и входом первого элемента временной задержки, выход которого соединен с управляющими входами второго интегратора вычислительного блока и сумматора, а также входом второго элемента временной задержки, выход которого сое
динен с управляющим входом первого коммутатора, первым управляющим входом второго коммутатора, управляющими входами блок-сумматора и первого интегратора вычислительного блока, выход первого коммутатора соединен с вторым входом сумматора, третий вход которого соединен с выходом второго коммутатора, а выход-с входом индикационного табло фактической загрузки вагона и первым входом блока раз- ности, вход второго коммутатора соединен с выходом интегратора конвейерных весов, с выходом которого также соединены вход индикационного табло суммарной производительности и первый вход блока сравне- ния, вход интегратора конвейерных весов соединен с первым выходом третьего коммутатора, второй выход которого соединен с входом запоминающего устройства полной производительности, первый управля- ющий вход третьего коммутатора совместно с входом третьего элемента временной задержки и входом четвертого элемента вре- менной задержки соединен с выходом блока сравнения, выход четвертого элемен- та временной задержки соединен с управляющим входом интегратора и вторым входом второго коммутатора, выход третье го элемента временной задержки соединен с вторым управляющим входом третьего коммутатора, второй вход блока сравнения совместно с вторым входом блока разности соединен с выходом задатчика дозы, вход третьего коммутатора совместно с входом индикационного табло мгновенной произ- водительности соединен с выходом множителя конвейерных весов, первый вход которого соединен с выходом силоизмери- тельного датчика, выход датчика угла наклона конвейера соединен с вторым входом множителя конвейерных весов и входом первого коммутатора блока формирования временных задержек, выход датчика скорости соединен с третьим входом множителя конвейерных весов и входом второго комму- татора блока формирования временных задержек, выход блока разности соединен с первым входом первого вычислительного элемента блока формирования временных задержек, выход первого коммутатора бло-
ка формирования временных задержек соединен с первым входом второго вычислительного элемента блока формирования временных задержек, выход второго коммутатора блока формирования временных задержек соединен с вторыми входами первого и второго вычислительных элементов блока формирования временных задержек, выход первого вычислительного элемента блока формирования временных задержек соединен с первым, а выход второго вычислительного элемента с вторыми входами сумматора блока формирования временных задержек, выход сумматора блока формирования временных задержек, выход сумматора блока формирования временных задержек соединен с первым входом блока сравнения блока формирования временных задержек, второй блок сравнения блока формирования временных задержек соединен с выходом счетчика времени блока формирования временных задержек, вход третьего коммутатора блока формирования временных задержек совместное первым управляющим входом счетчика времени и первыми управляющими входами первого и второго коммутаторов блока формирования временной задержки соединен с выходом блока сравнения, выход блока сравнения блока формирования временных задержек соединен с первым управляющим входом третьего коммутатора блока формирования временных задержек, выход третьего коммутатора блока формирования временных задержек соединен с входом элемента временной задержки блока формирования временной задержки, управляющим входом запоминающего устройства полной производительности и входом блока управления приводом затвора, выход которого соединен с приводом затвора, выход элемента временной задержки блока формирования временных задержек соединен с вторым входом третьего коммутатора и вторым управляющим входом счетчика времени, вторыми управляющими входами первого и второго коммутаторов и управляющим входом первого вычислительного элемента блока формирования временных задержек.
Фиг, 2 V
(
Редактор
Ри&Ч
Составитель Ю.Голубь Техред М.Моргентал
Корректор Н.Гунько
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для весового дозирования сыпучих материалов | 1982 |
|
SU1076766A1 |
| Дозатор сыпучих и кусковых материалов | 1981 |
|
SU1010930A1 |
| Весоизмерительное устройство для роторного экскаватора | 1989 |
|
SU1657974A1 |
| Способ весового непрерывногодОзиРОВАНия СыпучиХ МАТЕРиАлОВ | 1979 |
|
SU815516A1 |
| СПОСОБ И УСТРОЙСТВО СИНХРОНИЗАЦИИ М-ПОСЛЕДОВАТЕЛЬНОСТИ С ПОВЫШЕННОЙ СЛОЖНОСТЬЮ | 1999 |
|
RU2153230C1 |
| Устройство для весового дозирования сыпучих материалов | 1976 |
|
SU714162A1 |
| Дозатор сыпучих и кусковых материалов | 1983 |
|
SU1220429A1 |
| Устройство для контроля и учета работы добычного роторного экскаватора | 1983 |
|
SU1145089A1 |
| Арифметическое устройство | 1984 |
|
SU1229754A1 |
| Способ весового дозирования сыпучих материалов и дозатор сыпучих материалов | 1987 |
|
SU1516792A1 |
Использование: изобретение относится к приборостроению и может быть использовано в весодозирующей технике для форми- рования доз материала с весом, минимально отличающимся от заданного веса дозы. Сущность: изобретение содержит установленные на конвейере 1 конвейерные весы с измерительной частью, включающей в себя грузоприемный механизм 2 с силоизмерительным датчиком 3, датчик скорости 4 и датчик угла наклона конвейера 5, опорно-поворотное разгрузочное устройство 6 с подвижной разгрузочной частью 7 и приводом поворота нижней части, затвор 8с приводом 9. При этом важно: частью весодозировочного устройства является операционное устройство. 4 ил.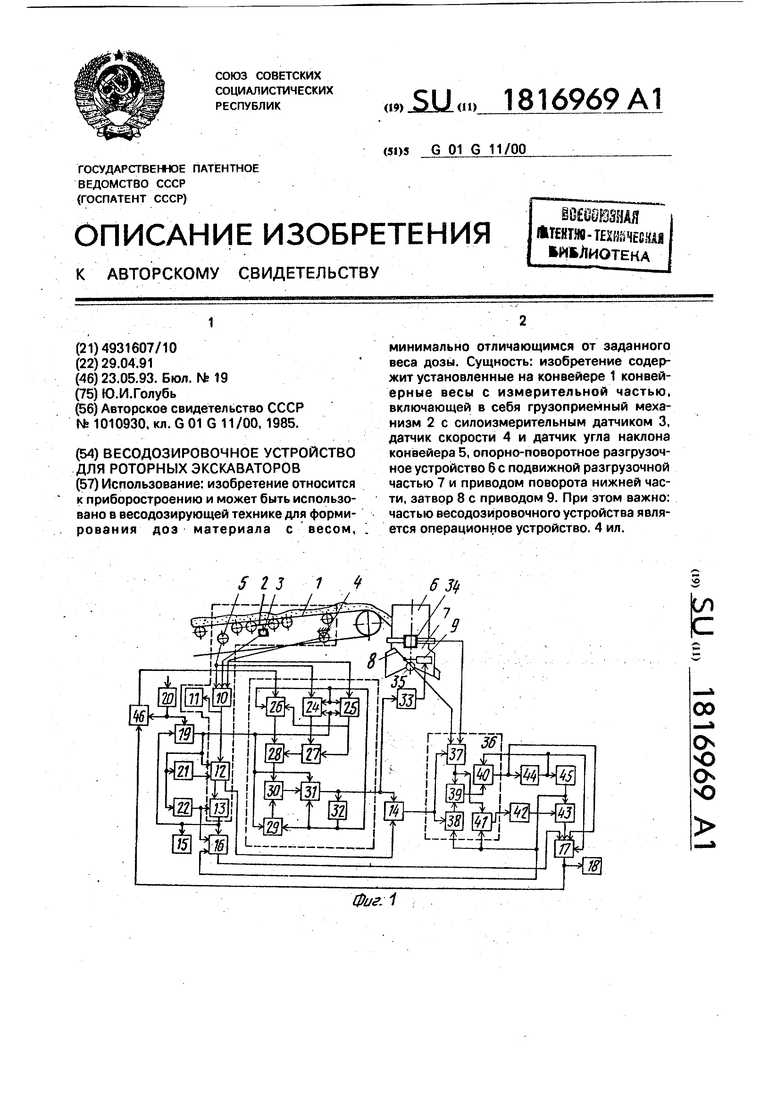
| Дозатор сыпучих и кусковых материалов | 1981 |
|
SU1010930A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
