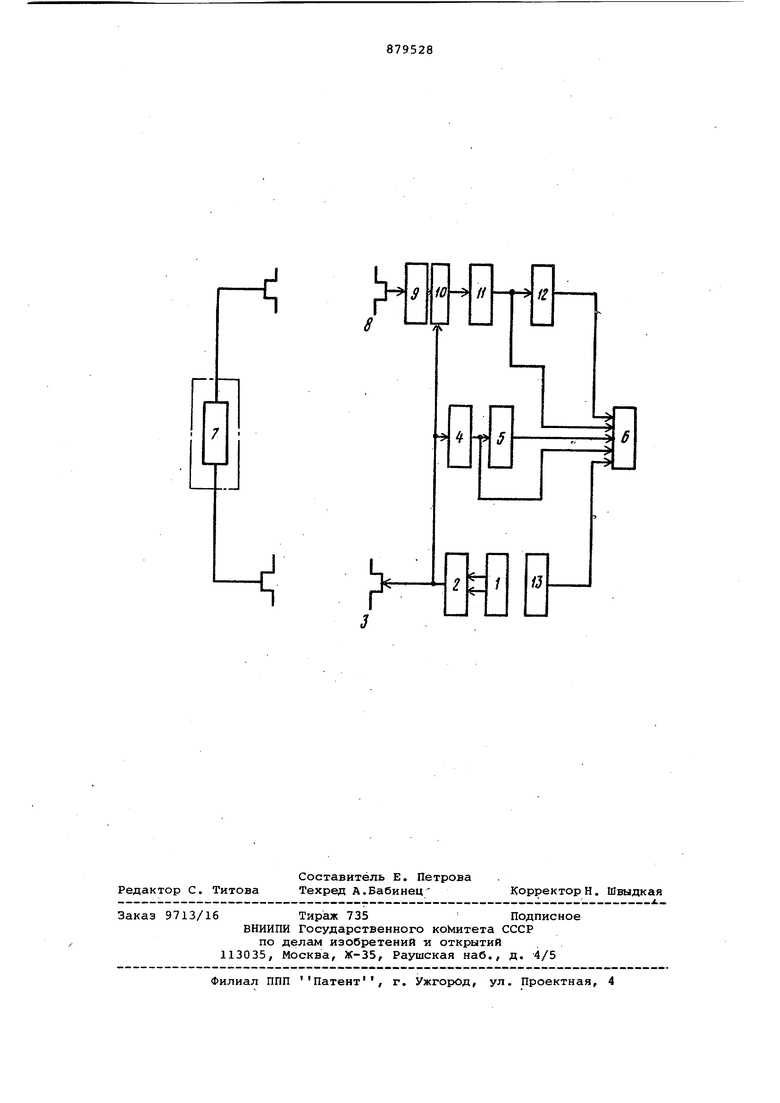
на выходе первого сумматора 2 с помощью генератора 1 формируется сигнал с изменяющейся во времени частотой. Этот сигнал поступает на первый вход второго сумматора 1.0 и одновременно излучается в направлении ретранслятора 7 через передающую антенну 3.
Эхо-сигнал, принятый после переизлучения ретранслятором 7, приемной антенной8 и прошедший через приемник 9 и второй сумматор 10, складываясь с частью излучаемого сигнала, образует стоячую волну, перемещающуюся в пространстве вследствие изменения частоты излучаемого сигнала. При этом дальность D до объекта определяется из соотношения
С- Л-.,
, 2гДе N - число полуволн стоячей
волны, прошедших в точке измерений;
д - разность частот генератора 1 в начале (fi, ) и конце (fy ) отсчета (); д,.- конечная в данном цикле измерений длина волны
излучаемого сигнала. Блок 11 и счетчик 12 позволяют определить точки, в которых необходимо измерять частоты fj и f и в интервале между ними производить подсчет числа прошедщих полуволн. Прямое измерение частот и f, требует быстродействия, выходящего за пределы технических возможностей Для косвенного измерения этих часто введен блок 4 и синхронизатор 5, которые с помощью блока 13 и вычислителя б осуществляют определение частот f ц и f 1 . В момент прохождения митгамума Сигнала биений синхронизатор 5 вырабатывает синхронизирующие импульсы с периодом (61 и Т 2; Ti , соответственно (SL чатота биений).
Минимумы стоячей волны после прохождения через блок 11 в виде импулсов поступают на счетчик 12 и вычислитель б, в который поступают также масштабные метки с блока 13.
Определение указанных частот f и f и производится фиксацией в BtoF числителе б числа масштабных меток, прошедших от момента появления синхронизирующего импульса до момента появления первого минимума стоячей волны U , а также до момента появления последнего минимума стоячей :
волны 2Гц и соответствующих им импульсов.Таким образом, определяются значения Тт., и €
S.
.н.
В вычислителе & производится определение частот f L. и f I/ (ш,
,vH.
.- 27rf зависимости
) fLf .. - ,5 ij1П
И ЛШ (f) при значгениях t
t Г,,
эни: С помощью соотношения
г - ц;
MS-bi:.,
2ГС t (,iJ ,
г -
f 2fC
2.fC /
Погрешность определения частот f j. связана с частотой масштабных йеток и стабильностью частоты генератора 1.
Предложенное устройство позволяет повысить точность измерения дальности до управляемого машинно-тракторного агрегата и ускорить процесс измерения, формула изобретения
Устройство измерения дальности до управляемого машинно-тракторного агрегата, содержащее генератор качающейся частоты, передающую антенну, ретранслятор, последовательно соединенные приемную антенну и приемник, последовательно соединенные блок определения минимумов стоячей волны, счетчик импульсов и вычислитель, а также синхронизатор, выход которого соединен с вторым входом ; вычислителя,о тличающееся тем, что, с целью повышения точности измерения дальности, введены два сумматора, блок определения минимумов сигнала биений, блок выработки 5 масштабных импульсов, при этом первый и второй входы первого сумматора соединены с соответствующими выходами генератора качающейся частоты, выход первого сумматора соединен с входом передающей антенны, первым входом второго сумматора и входом блока определения минимума сигнала биений, выход которого соединен с входом синхронизатора и третьим входом вычислителя, второй вход второго- сумматора соединен с выходом приемника , выход второго сумматора соединен с входом блока определения минимумов стоячей волны, выход которого соединен с четвертым входом вычислителя, выход блок.а выработки масштабных импульсов соединен с пятым входом вычислителя;
Источники информации, принятые во внимание при экспертизе
1. Авторское свидетельство СССР по заявке 2558364/18-09, кл. G 01 S 9/24,1978 (прототип).
И
10
//
iz
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для измерения дальности до управляемого машино-тракторного агрегата | 1977 |
|
SU676201A1 |
| Способ вождения мобильных сельскохозяйственных агрегатов | 1984 |
|
SU1274637A1 |
| СПОСОБ ИЗМЕРЕНИЯ ВЫСОТЫ И РАДИОВЫСОТОМЕР С НЕПРЕРЫВНЫМ ЛЧМ СИГНАЛОМ, ИСПОЛЬЗУЮЩИЙ СПОСОБ | 2013 |
|
RU2555865C2 |
| Устройство для определения дальности и скорости объекта | 1979 |
|
SU820430A1 |
| РАДИОНАВИГАЦИОННАЯ СИСТЕМА (БАГИС-А) | 1995 |
|
RU2097780C1 |
| СИСТЕМА ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ПОДВИЖНОГО ОБЪЕКТА | 1995 |
|
RU2095821C1 |
| ВЕРТОЛЕТНАЯ РАДИОЛОКАЦИОННАЯ СИСТЕМА | 1997 |
|
RU2147136C1 |
| СПОСОБ ИЗМЕРЕНИЯ ВЫСОТЫ И РАДИОВЫСОТОМЕР С НЕПРЕРЫВНЫМ ЛЧМ СИГНАЛОМ, ИСПОЛЬЗУЮЩИЙ СПОСОБ | 2013 |
|
RU2552515C2 |
| Устройство для измерения показателя преломления атмосферы в интересах радиолокации с использованием преобразователя Гильберта | 2023 |
|
RU2804460C1 |
| Устройство для измерения показателя преломления среды в интересах радиолокации | 2022 |
|
RU2795575C1 |
13
