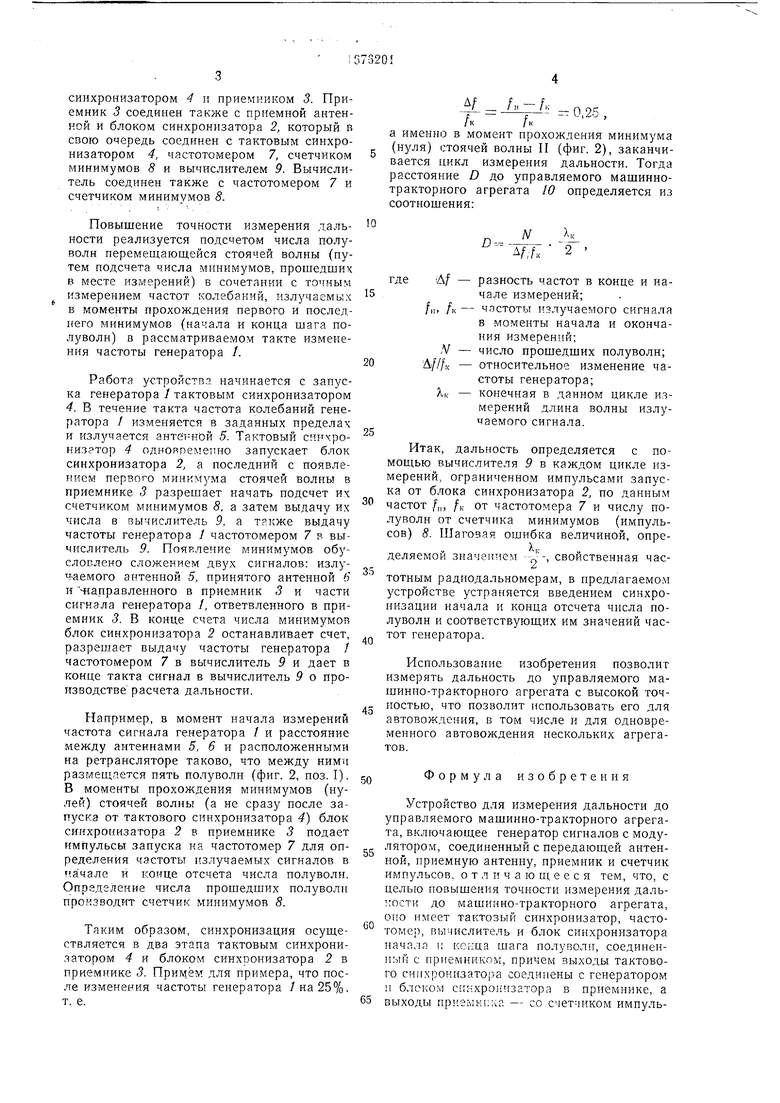
синхронизатором 4 и приемником 5. Приемник 3 соединен также с приемной антенной и блоком синхронизатора 2, который в свою очередь соединен с тактовым синхронизатором 4, частотомером 7, счетчиком минимумов 8 и вычислителем 9. Вычислитель соединен также с частотомером 7 и счетчиком минимумов 8.
Повышение точности измерения дальности реализуется подсчетом числа полуволн перемещающейся стоячей волны (путем подсчета числа минимумов, прощедщих в месте измерений) в сочетании с точным измерением частот колебаний, излучаемых в моменты прохождения первого и последнего минимумов (начала и конца шага полуволн) в рассматриваемом такте изменения частоты генератора /.
Работа устройства начинается с запуска генератора / тактовым синхронизатором 4. В течение такта частота колебаний генератора / изменяется в заданных пределах и излучается антенньй 5. Тактовый сиьхронизатор 4 одновреметтно запускает блок синхронизатора 2, а последний с появлением первого минимума стоячей волны в приемнике 3 разрешает начать подсчет их счетчиком минимумов 8, а затем выдачу их числа в вычислитель 9, а также выдачу частоты генератора / частотомером 7 в вычислитель 9. Появление минимумов обусловлено сложением двух сигналов: излуч-аемого антенной 5, принятого антенной 6 и-направленного в приемник 5 и части сигнала генератора /, ответвленного в приемник 3. В конце счета числа минимумов блок синхронизатора 2, останавливает счет, разрешает выдачу частоты генератора / частотомером 7 в вычислитель 9 и дает в конце такта сигнал в вычислитель 9 о производстве расчета дальности.
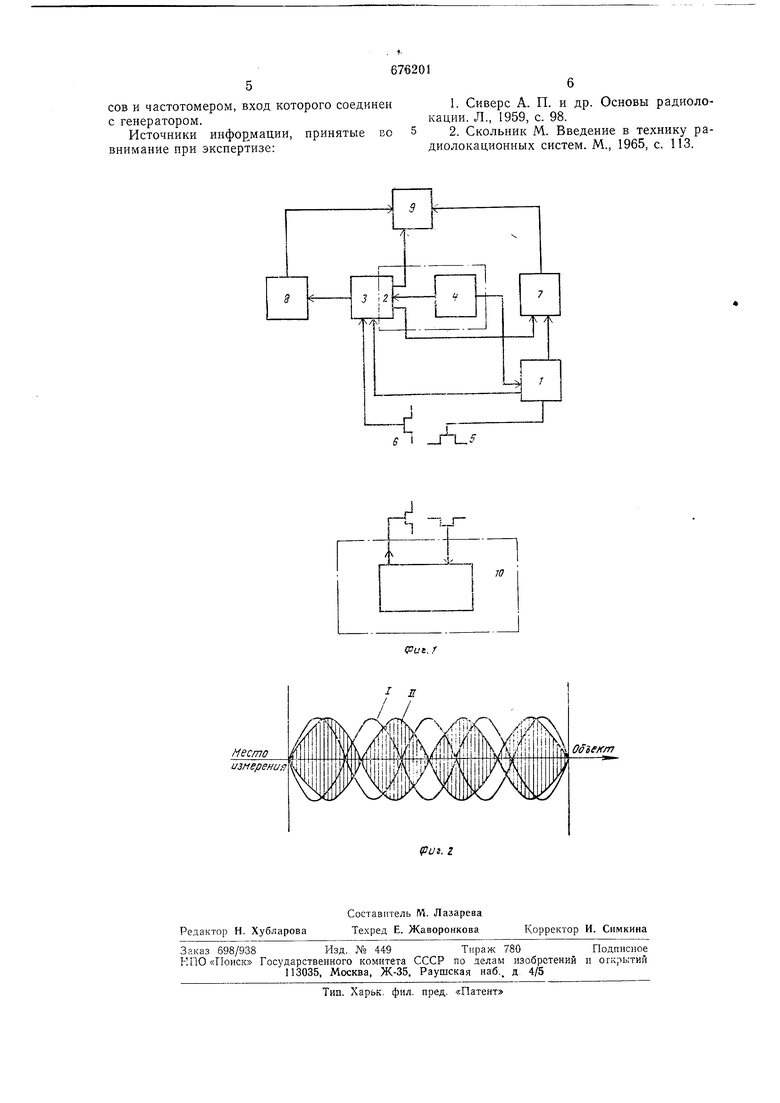
Например, в момент начала измерений частота сигнала генератора / и расстояние между антеннами 5, 5 и расположенными на ретрансляторе таково, что между ними размещается пять полуволн (фиг. 2, поз. I). В моменты прохождения минимумов (нулей) стоячей волны (а не сразу после запуска от тактового синхронизатора 4} блок синхронизатора 2 в приемнике 3 подает импульсы запуска на частотомер 7 для определения частоты излучаемых сигналов в иа:чале и конце отсчета числа полуволн. Определение числа прошедших полуволн производит счетчик минимумов 8.
Таким образом, синхронизация осуществляется в два этапа тактовым синхронизатором 4 и блоком синхронизатора 2 в приемнике 5. Примем для примера, что после изменения частоты генератора 7 на 25%, т. е.
.L AZ1/K 09Г /к - /к
а именно в момент прохождения минимума (нуля) стоячей волны И (фиг. 2), заканчивается цикл измерения дальности. Тогда расстояние D до управляемого машиннотракторного агрегата W определяется из соотношения:
D- Д/;А 2
где Л/ - разность частот в конце и начале измерений;
/1. /к - частоты излучаемого сигнала в моменты начала и окончания измерений;
.V - число прошедших полуволн; AI///K - относительное изменение частоты генератора;
VK - конечная в данном цикле измерений длина волны излучаемого сигнала.
Итак, дальность определяется с помощью вычислителя 9 в каждом цикле измерений, ограниченном импульсами запуска от блока синхронизатора 2, по данным частот /„, IK от частотомера 7 и числу полуволн от счетчика минимумов (импульсов) 8. Шаговая ошибка величиной, опре м.
деляемои значеит1ем „ -, свойственная час
тотным радиодальномерам, в предлагаемом устройстве устраняется введением синхронизации начала и конца отсчета числа полуволн и соответствующих им значений частот генератора.
Использование изобретения позволит измерять дальность до управляемого машинно-тракторного агрегата с высокой точностью, что позволит использовать его для автовождения, в том числе и для одновременного автовождения нескольких агрегатов.
Формула изобретения
Устройство для измерения дальности до управляемого машинно-тракторного агрегата, включающее генератор сигналов с модулятором, соединенный с передающей антенной, приемную антенну, приемник и счетчик импульсов, отличающееся тем, что, с целью повышения точности измерения дальности до машинно-тракторного агрегата, оно имеет тактовый синхронизатор, частотомер, вычислитель и блок синхронизатора началгТ i: кскца шага полуволн, соединенный с приемником, причем выходы тактового си1гхронизэ,то)а соединены с генератором 1 блском синхронизатора в приемнике, а выходы приемника - со счетчиком импуль56
сов и частотомером, вход которого соединен1. Сивере А. П. и др. Основы радиолос генератором.кации. Л., 1959, с. 98.
Источники инфор,мации, принятые во5 2. Скольник М. Введение в технику равнимание при экспертизе:диолокационных систем. М., 1965, с. ИЗ.
676201
S I
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство измерения дальности до управляемого машинно-тракторного агрегата | 1979 |
|
SU879528A1 |
| Способ автовождения сельскохозяйственных агрегатов | 1977 |
|
SU946426A1 |
| УСТРОЙСТВО ИЗМЕРЕНИЯ ПАРАМЕТРОВ ВОЛНЕНИЯ | 2008 |
|
RU2384861C1 |
| Радиоволновый уровнемер | 1981 |
|
SU1010469A1 |
| ИМПУЛЬСНО-ФАЗОВАЯ РАДИОВЫСОТОМЕРНАЯ СИСТЕМА | 2013 |
|
RU2551448C1 |
| Устройство для измерения частоты | 1982 |
|
SU1247773A1 |
| СПОСОБ ИЗМЕРЕНИЯ ДАЛЬНОСТИ | 1985 |
|
RU2145092C1 |
| СПОСОБ ОБНАРУЖЕНИЯ И КЛАССИФИКАЦИИ НАДВОДНЫХ ЦЕЛЕЙ | 2005 |
|
RU2287840C1 |
| ОПТИЧЕСКОЕ УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ РАССТОЯНИЙ ДО ОБЪЕКТА | 2017 |
|
RU2653558C9 |
| РАДИОНАВИГАЦИОННАЯ СИСТЕМА (БАГИС-А) | 1995 |
|
RU2097780C1 |
J -1
п
10
