Изобоетепие относится к малогабаритным псюмишла-шым noi рузчикзм для стесненных /слов роботы, иироко используемьж для ЛОГОСА- ю-раз рузочных, транспортных У . .ел ч, работ я всех отраслях народного ; тгч ггна.
Цел;.. лзо5эетения -- повышение эффек- Г лвнг5сгк пТ| |г;мозанля пут«м исключения ,«-н.-о („ , ;-ч подъезде к штабелю хля ° -; яки рузе без испольэо- Р.ЧИ- nvjuvj. fihb.bsx нааосных грузозахватЬ нч ) ,(),
г i г 5331-, , ник, вид сбоку; на фиг. s (,. вил сверху; на фиг. 3 - вид Ј HC -i} i м Ф/. 3 - г.ид Б на фиг. 3; на 6 лг - - - л S-B РЭЭ фиг. 3; на фиг. 6 - то г исмещиниигрузоподъемни- к а до т ос ч переднего мое га; на фиг. 7 - юнг рули и я ,№vxiiiapHnpHoro соединения ro i jono iijc (%1 .ка с корпусом погрузчика в v ;р,ним силовьм гидравличе- , , роч механизма смещения вдоль се/1 эднего моста грузоподьемнм- KCI, вмо но фиг. 8 разрез Г-Г на фиг. 7; i , ф - оаорез Д-Л на фиг. 7; на фиг. 10 - го, и фиг. 7, при боковом повороте грузогюпьс, г/жа- на фиг. 1 го же, при со- ,ек п ргцкй бокового поворота и смещение и )г.ь оси переднего моста грузо- гэ ьемчЕ -, афиг. 12 - вид Е на фиг. 7, при каклэне р/ .прдьемиика вперед; на фиг. 13 1, грузоподъемника пу- тем yseri|-,-,t; - ш олесчсй базы погрузчика; гз . - И° р ц /я бокового поворота rpy i го ts vi.4; ча ф|/г. 15 - совмещение tiefj йоге ЮЕОрота и смещения
.efi ,о,. га грузоподъемника.
Лрог нный погрузчик содержит сварной v )f , задний ведущий и управ- - - et r-вих ной и поворотный orK jcvnd -- оолуса гередний мост 3, , , i ч ч геле юиической комст- . „ k ijprwn- сиосумуляторную Ратарею I, - ,л.-мз 3 продольного выдви- хенмч . г -о о iioBcpma переднего мос- i5 Э , --io чгп| усе 1, механизм 7 .н.цеь1 i и -одг.мьика 3относительно пер&.анэ - ; Ј3яюр уса 1,двухшарнир- чос сег ч ; -t- Э г;зузо одъ мника 4 с кор- tiyrcv 1 - -i Э vnpaeneHVfl.
Ко,.о- & своей задней часгмсп ос i i . аедущии и управляемый мост 2, е rep u- v .-гги выполненной с боковыми скосам. - - з..иемил грузоподъемника ny-i5i Л г ч ч поворота, -;ерез двухшар- v .rirfiine В и рузоподъемник 4 - ча ггэред 1 v ост Э, ощис возможность как ic несем щешя, так и боко- ioro г ч . о нос Н пькс корпуса 1 посредством механизма 6 продольного выдвижения и бокового поворота.
Нижняя часть наружной рамы грузоподъемника 4 связана с передним подвижным мостом 3, за счет чего продольному перемещению или боковому повороту переднего моста 3 всегда сопутствует наклон вперед-назад или боковой поворот грузоподъемника,
O На грузовую подъемную каретку 10 грузоподъемника 4 навешен вилочный захват 11 для грузов на поддонах или в таре, приспособленной для ввода вилочного захвата. Механизм 6 продольного выдвижения и
5 бокового поворота переднего моста (фиг. 3 и 4) представляет собой два силовых гидравлических цилиндра 12 и 13 поршневого типа двухстороннего действия, расположенных в нижней части корпуса 1 симметрично про0 дольной оси погрузчика и шарнирно закрепляемых днищем к корпусу 1 и штоком - к оси 14 переднего моста 3. Дпя обеспечения работы цилиндров 12 и 13 без перекосов и провисания в подвижном вдоль оси пере5 днего моста 3 соединении опоры 15 (фиг. 5) грузоподъемника 4 с осью 14 переднего моста 3 применена призматическая шпонка 16.
Механизм 7 смещения грузоподъемни0 ка 4 относительно переднего моста 3 и корпуса 1 выполнен в виде двух синхронно работающих силовы гидравлических цилиндров поршневого типа двухстороннего действия. Один из этих цилиндров - нижний
Ь 17 (фиг. 3 и 4) своим корпусом жестко прикреплен к оси 14 переднего моста 3 и штоком шарнирно - к опоре 15 грузоподъемника 4, Посредством силового гидравлического цилиндра 17 опора 15 грузоподъемника 4 пе0 ремещается по оси 14 переднего моста 3, сдвигая грузоподъемник 4 вдоль нее (например, влево, как на фиг. 6). Другой цилиндр этого механизма - верхний 18 (фиг. 7) своим корпусом жестко прикреплен к промежуточ5 ному звену (вертикальной оси) 19 двухшар- нирного соединения и штоком связан с горизонтальной вилкой 20 этого же соединения.
Применение в механизме смещения
0 двух синхронно работающих силовых гидравлических цилиндров с принятым вариантом расположения и крепления позволяет исключить произвольное смещение системы Передний мост - грузоподъемник от5 носительно корпуса погрузчика.
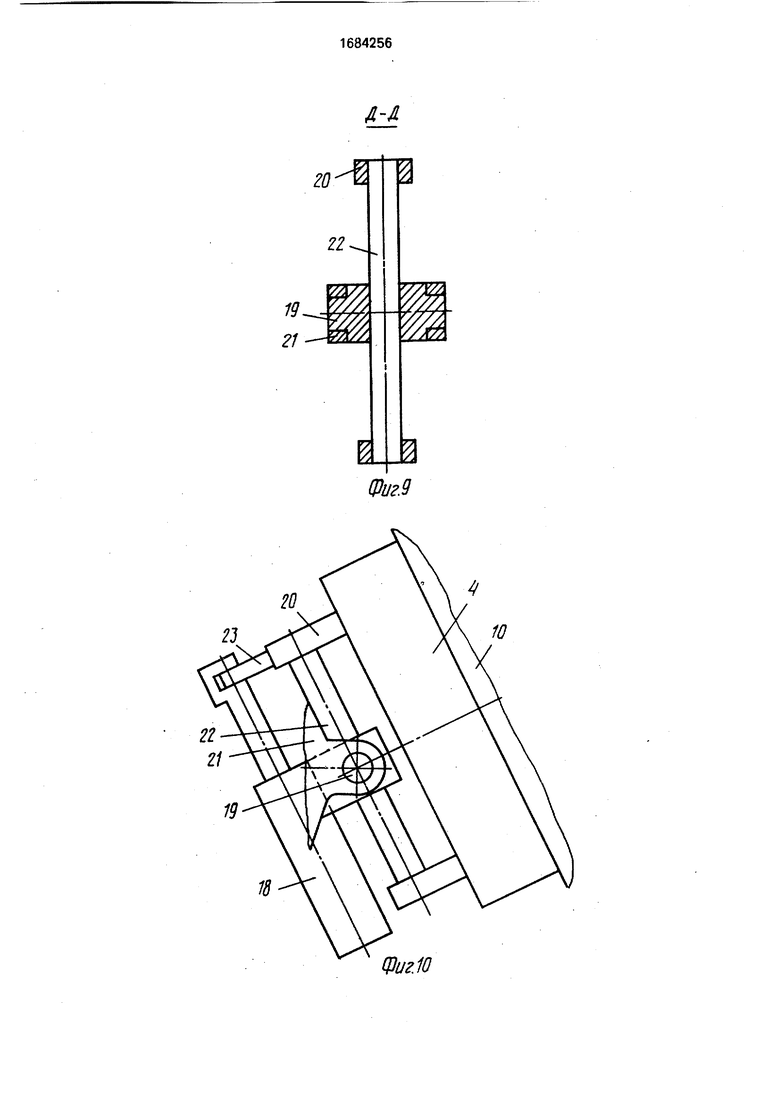
Двухшарнирное соединение 8 грузоподъемника 4 с корпусом 1 погрузчика (фиг. 7, 8 и 9) представляет собой сочетание вертикальной и горизонтальной вращательных кинематических пар с взаимно пересекающимися осями, образующих трехзвенный механизм, в котором одно концевое эзено - вертикальная вилка 21 с парой отверстий, расположенных на одной вертикальной оси, - прикреплено к корпусу погрузчика, другое концевое звено - горизонтальная вилка 20 с неподвижно закрепленной в ней горизонтальной осью 22 - прикреплено к рузоподъемнику 4, промежуточное звено - вертикальная ось 19 - концами вставлена в отверстия верти- калькой вилки 21, r/ie имеет возмЪжность поворота (фиг. 10), и в средней части связана с осью 22 горизонтальной вилки 20 посредством подвижного цилиндрического соединения, допускающего смещение (фиг. 11) и поворот (фиг. 12) горизонтальной вилки 20 относительно вертикальной оси 19.
Выполнение конструкции соединения штока верхнего силового гидравлического цилиндра 18 механизма смещения 7 с гори- зонтальной вилкой 20 двухшарнирного соединения 8 в виде боковой вилки головки штока, охватывающей сегментный кронштейн 23 (фиг.12), прикрепляемый к горизонтальной вилке 20 и выполняемый с цилиндрической поверхностью, обращенной к головке штока, ось которой совпадает с осью горизонтальной оси 22, закрепленной в горизонтальной вилке 20 двухшарнирного соединения 8, не препятствует повороту горизонтальной вил- ки 20 относительно вертикальной оси 19 двухшарнирного соединения 8 при наклоне грузоподьемника.
Погрузчик работает следующим образом (фиг. 13-15).
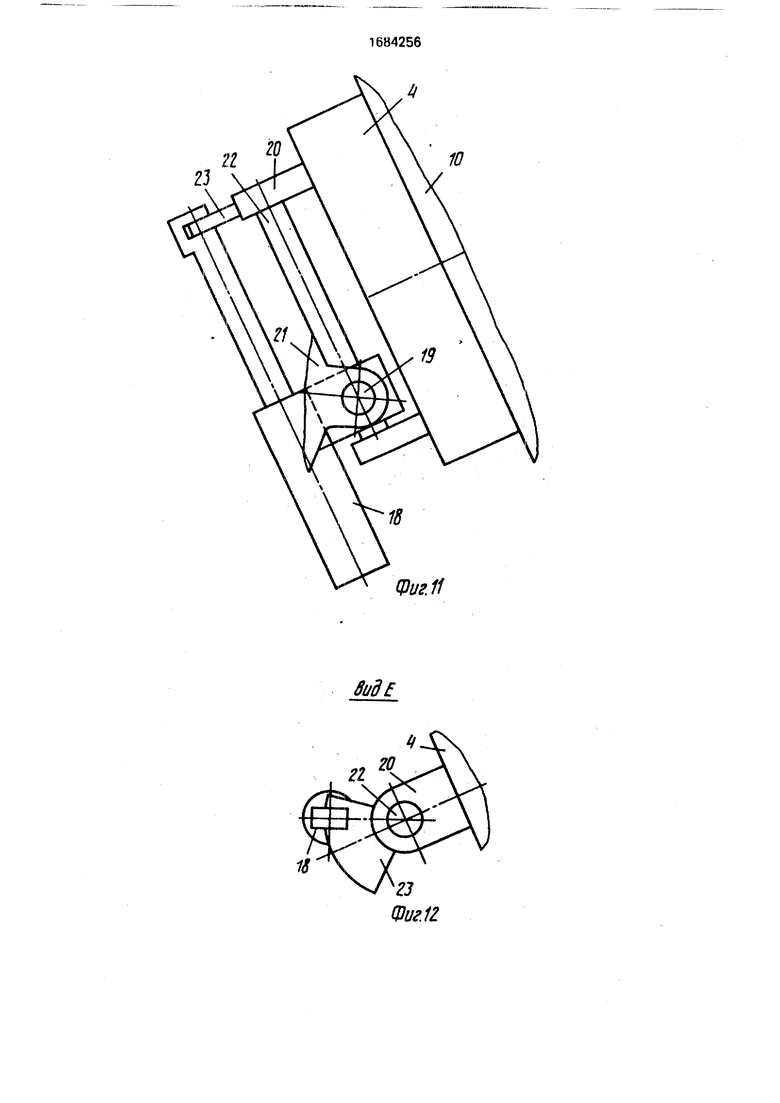
Наклон грузоподьемника 4 (фиг. 13) вперед для облегчения захвата и установки груза и назад для повышения продольной устойчивости погрузчика при транспортировании и устойчивости груза, расположен- ного на вилочном захвате 11, производится при синхронной работе силовых гидравлических цилиндров 12 и 13 механизма 6 продольного выдвижения и бокового поворота переднего моста 3 относительно корпуса 1, которые передвигают передний мостЗ вместе с прикрепленной к нему нижней частью наружной рамы грузоподъемника 4. В целом грузоподъемник 4 качается относительно корпуса 1 вокруг горизонтальной оси двухшарнирного соединения 8.
При выдвижении штоков цилиндров 12 и 13 осуществляется ход впереди переднего моста 3, в связи с чем увеличивается колесная база, и грузоподъемник 4 наклоняется назад, соответственно увеличивается продольная устойчивость погрузчика и устойчивость груза на вилочном захвате 11.
При вдвижении штоков цолиндров 12 и 13 осуществляется ход назад переднего моста 3, в связи с чем, наоборот, уменьшается колесная база, и грузоподъемник 4 наклоняется вперед. Уменьшение колесной базы, а следовательно, и длины погрузчика повышает его маневренные качества.
Наклоняемый вперед-назад грузоподъемник 4 может занимать вертикальное положение (фиг. 1) для захвата и установки груза.
Боковой поворот грузоподъемника 4 относительно корпуса 1 (фиг. 14) производится при раздельном действии цилиндров 12 и 13. Так, для поворота грузоподъемника 4 влево, (фиг. 14) левый цилиндр 12 должен работать на вдвижение (ход назад), а правый цилиндр 13 - на выдвижение (ход вперед), и наоборот. Исходным для бокового поворота относительно корпуса 1 погрузчика положением грузоподъемника 4 может быть вертикальное или близкое к нему наклонное вперед положение, в котором находится грузоподъемник 4 при захвате и установке груза.
Смещение вдоль оси переднего моста 3 грузоподъемника 4 относительно переднего моста 3 и корпуса 1 погрузчика (фиг. 15) производится за счет синхронной работы верхнего 18 и нижнего 17 силовых гидравлических цилиндров механизма 7 смещения. При выдвижении штоков этих цилиндров осуществляется смещение грузоподъемника 4 относительно корпуса 1 влево (фиг. 15), при вдвижении их штоков осуществляется смещение грузоподъемника 4 относительно корпуса 1 вправо.
Возможность совмещения бокового поворота и смещения вдоль оси переднего моста грузоподъемника (фиг. 15) позволяет полностью исключить маневрирование погрузчика при подъезде к штабелю для захвата и установки груза.
Формула изобретения
Промышленный погрузчик, содержащий выдвижной и поворотный в горизонтальной плоскости относительно корпуса приводами передний мост, несущий грузоподъемник, соединенный с корпусом погрузчика двухшарнирным соединением, о т- личающийся тем, что, с целью повышения эффективности использования путем исключения маневренности при подъезде к штабелю для захвата или установки груза без использования специальных навесных грузозахватных приспособлений, грузоподъемник смонтирован на переднем мосту с возможностью вдоль оси последнего приводом.
с in
CN
«з- со
Ј
N
20 4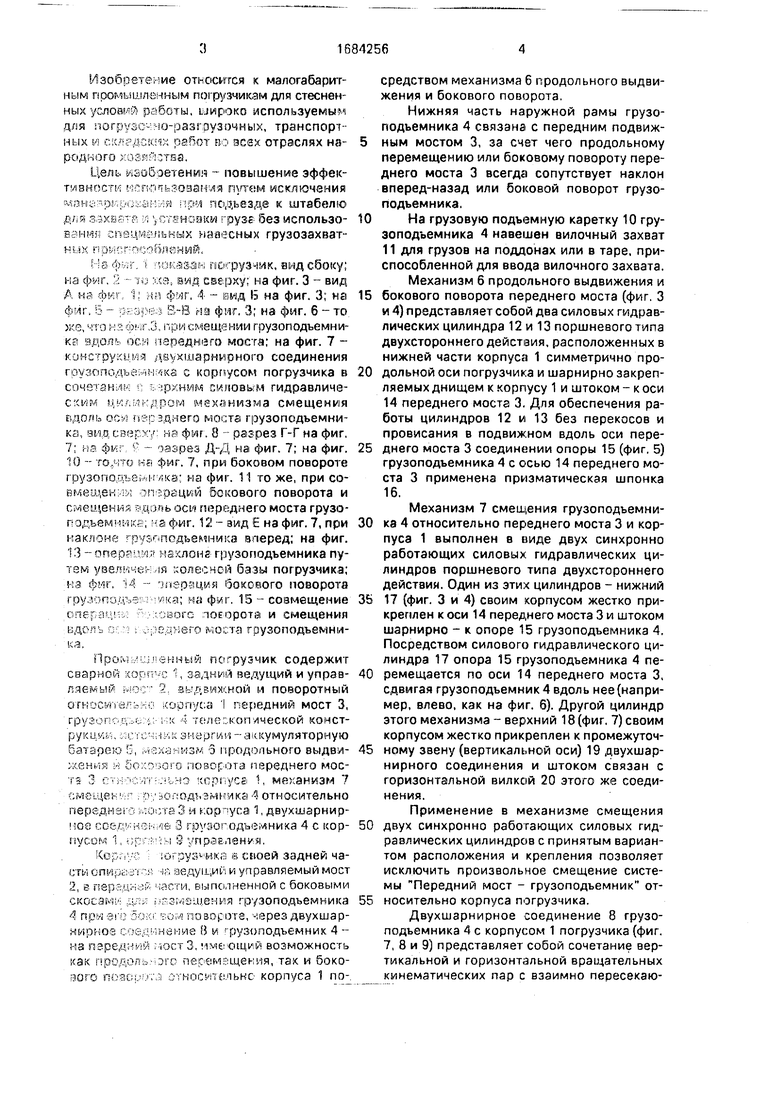

| название | год | авторы | номер документа |
|---|---|---|---|
| ПРОМЫШЛЕННЫЙ ПОГРУЗЧИК | 1973 |
|
SU407833A1 |
| ПРОМЫШЛЕННЫЙ ПОГРУЗЧИК | 1972 |
|
SU339494A1 |
| Бульдозерно-грейферный ковш к погрузчику | 1975 |
|
SU537945A1 |
| Вилочный погрузчик | 1986 |
|
SU1370062A1 |
| ПОГРУЗЧИК ДЛЯ ЗАГРУЗКИ И ВЫГРУЗКИ ВАГОНОВ | 1993 |
|
RU2092429C1 |
| МАЛОГАБАРИТНЫЙ ЭЛЕКТРОПОГРУЗЧИК | 2012 |
|
RU2539442C2 |
| Захват погрузчика | 1987 |
|
SU1428686A1 |
| Боковой захват погрузчика | 1974 |
|
SU546560A1 |
| ГРУЗОВАЯ КАРЕТКА ГРУЗОПОДЪЕМНИКА ПОГРУЗЧИКА | 2024 |
|
RU2828413C1 |
| Гидравлическая система погрузчика с поворотным грузоподъемником и выдвижным грузозахватным органом | 1971 |
|
SU491587A1 |



Изобретение относится к малогабаритным промышленным погрузчикам для стесненных условий работы, широко применяемым для погрузочно-разгрузочных, транспортных и складских работ во всех отраслях народного хозяйства. Цель изобретения - повышение эффективности использования путем исключения маневрирования при подъезде к штабелю для захвата или установки груза без использования специальных навесных грузозахватных приспособлений. Промышленный погрузчик содержит корпус 1, задний ведущий и управляемый мост 2. выдвижной и поворотный относительно корпуса 1 передний мост 3, грузоподъемник 4, аккумуляторную батарею 5, механизм 6 продольного выдвижения и бокового поворота переднего моста 3 относительно корпуса 1, механизм 7 смещения грузоподъемника 4 вдоль оси переднего моста 3, выполненный в виде двух синхронно работающих силовых гидравлических цилиндров двухстороннего действия, двух- шарнирное соединение 8 грузоподъемника 4 с корпусом 1, органы 9 управления, каретку -10 и вилочный захват 11. Возможность совмещения бокового поворота и смещения вдоль оси переднего моста грузоподъемника позволяет полностью исключить маневрирование погрузчика при подъеме к штабелю для захвата и установки груза. 15 ил. В О 00 Јь ьо 01 ON фиг. 15
20
23
19
18
Фиг.9
4
10
Фиг. 10
23
21
10
Фиг. 11
видЕ
1684256
8идА
Iе
фиг.З в ид 6
фигЛ В-В
фиг5
//
Ю
12 15МК
Щигб
21 21
ГТ
19 18
Вид А
г-г.
22
(Риг. 8
(ри.1Ь10
| 0 |
|
SU339493A1 | |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
| Кинематографический аппарат | 1923 |
|
SU1970A1 |
