(54) РОЛИК РОЛЬГАНГА
| название | год | авторы | номер документа |
|---|---|---|---|
| Ролик рольганга | 1983 |
|
SU1155531A1 |
| Узел приводного рольганга | 1983 |
|
SU1143672A1 |
| Ролик рольганга | 1978 |
|
SU870286A1 |
| Устройство для подачи профильного проката в пресс-ножницы | 1982 |
|
SU1038116A1 |
| Ролик рольганга для сбрасывания грузов | 1984 |
|
SU1221104A1 |
| Устройство для укладки гибкого полотна в стопу | 1984 |
|
SU1164182A1 |
| Устройство для подачи бревен или брусьев в лесопильную раму и приема пиломатериалов | 1934 |
|
SU42682A1 |
| Узел приводного рольганга | 1980 |
|
SU931604A1 |
| Линия комплексной отделки щитовых деталей мебели | 1988 |
|
SU1574488A1 |
| Ролик рольганга | 1977 |
|
SU695912A1 |
1
Изобретение относится к подъемно-транспортному машиностроению, а именно к конструкции роликов, используемых в рольгангах.
Известен ролик рольганга, содержащий установленный на валу корпус с закрепленными на нем вальцами, расположенными по его окружности. Данный ролик обеспечивает принудительное вращение вальцев во взаимно перпендикулярных направлениях, посредством двух приводов. Один привод используется для вращения ролика вокруг его вала, а другой - для перемещения вала вдоль его ос flОднако такая конструкция ролика сложна, поскольку требует применения двух приводов.
Наиболее близким по технической сущности и достигаемому эффекту к предлагаемому является ролик рольганга, содержащий корпус, свободно установленный на валу в виде червяка, взаимодействующего с рабочими элемеитами, расположенными по окружности корпуса в его окнах 2J.
Недостатками данного ролика являются его сложиость, обусловленная наличием большого количества вальцев (червячных
колес) с осями, опорами, а также низкие технологические возможности, поскольку ролик, может перемещать в поперечном направлении (вдоль оси ролика) только такие грузы, ширина которых превыи1ает двойное расстояние между соседними вальцами. Цилиндрические же грузы (бревна, трубы и т. п.) вообще нельзя сбрасывать с рольганга, так как эти грузы могут западать между соседними вальцами (провалятся между ннми), и сброс их будет невозможен.
Цель изобретения - повышение эффективности работы ролика путем предотвращения западания транспортируемого материала между рабочими элементами.
Поставленная цель достигается тем, что ролнк снабжен блоками, закрепленными 15 внутри по окружности корпуса, а рабочие элементы выполнены в виде огибающих блоки бесконечных гибких органов с закрепленными на них захватами.
При этом захваты выполнены в виде тра20 вере, средняя часть которых имеет червячную нарезку.
Кроме того, ролик снабжен направляющими, закрепленными внутри корпуса с возможностью взаимодсй.ствия с ними гибких органов.
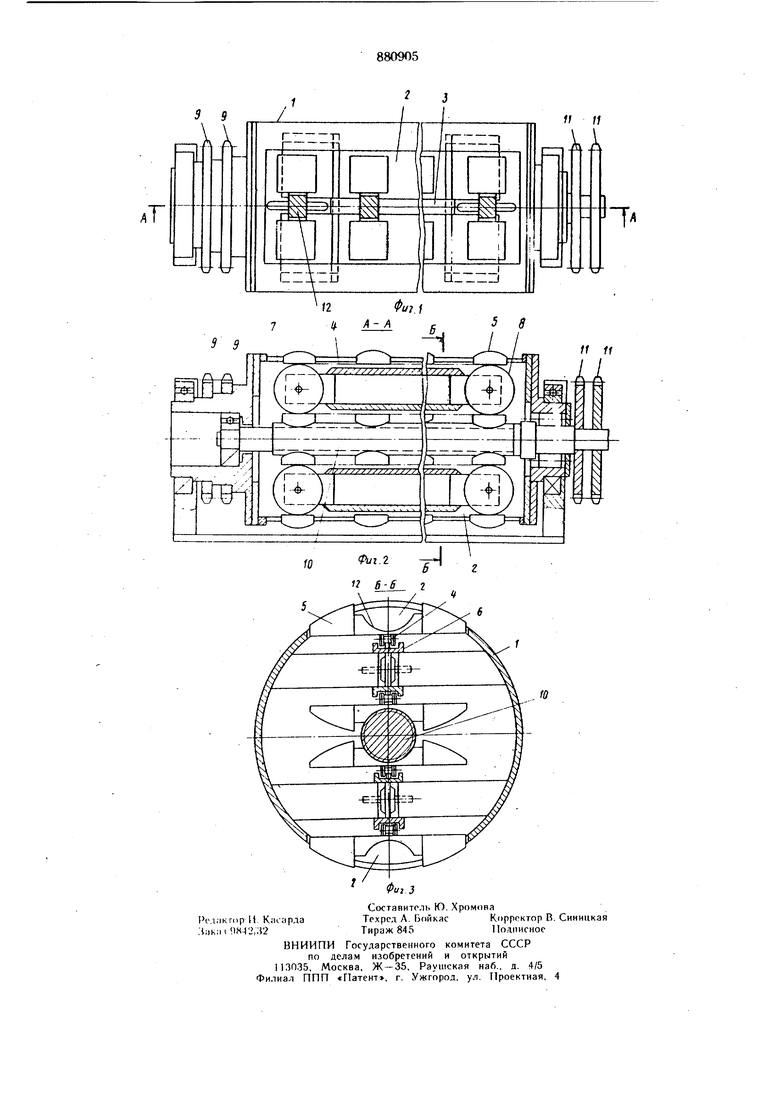
Н,ч фиг. изображен ролик, общий вид; на фиг. 2 - разрез А -. на фиг. J; на фиг. 3 - разрез Б- Б на фиг. 2.
Ролик содержит корпус I, выполненный в виде трубы с прямоугольными окнами 2 для размещения в них рабочих элементов 3. Последние представляют собой бесконечные тяговые органы 4, например, цепи с прикрепленными к ним захватами в виде траверс 5. Цепя 4 движутся по корытообразным направляющим 6, воспринимающим от них реактивную нагрузку, и охватывают блоки в виде .чвездочек 7 и 8. Направляющие 6 и оси звездочек 7 и 8 неподвижно закреплены в корпусе I. Рабочие элементы 3, т.е. цепные контуры расположены по окружности ролика. В зависимости от диаметра ролика их число может быть различно:.два, три или четыре. С. корпусом 1 ролика жестко соединены звездочки 9, сообщающие ему вращение от привода рольганга. Корпус 1 свободно охватывает вал 10, выполненный в виде червяка, причем вал 10 и корпус 1 могут вращаться независимо друг от друга. Вращение валу 10 от привода рольганга передается закрепленными на валу звездочками 11.
Средняя часть 12 траверс 5 выполнена с червячной нарезкой на поверхности и находится в зацеплении с червячной, нарезкой вала 10.
Ролик работает следующим образом.
От звездочек II вращается червяк 10, а от звездочек 9 с той же самой угловой скоростью - корпус I вместе с размещенными в нем рабочими элементами 3. Таким образом, траверсы 5 цепных контуров и червяк 10 вращаются синхронно, в результате чего не происходит смещения траверс 5 вдоль оси ролика, т.е. цепные контуры не перематываются на звездочках 7 и 8. Груз находящийся на поверхности ролика, перемещается вдоль продольной оси рольганга.
При необходимости сбросить груз с рольганга отключают от привода или звездочки
9,или звездочки 11. В первом случае останавливается корпус I с цепными контурами и траверсами 5. Вал-червяк 10, продолжая вращаться от своего привода, за счет взаимодействия с червячной частью 12 траверс 5, приводит их (а вместе с ними и весь цепной контур) в движение вдоль оси ролика. Груз, находящийся на ролике, сбрасывается с него, например влево.
Во втором случае останавливается вал
10,а корпус 1 вращается. В результате этого траверсы 5, обкатываясь вокруг вала 10, получают еще и движение в осевом направлстши ролика, но уже в другую сторону.
В этом случае груз, находящийся на ролике, также сбрасывается в другую сторону, т.е.
вправо. Если привод вала 10 выполнить двухскоростным, то не понадобиться останавливать вращение корпуса I дл сброса груза влево. Для этого привод вала 10 переключают на вторую, повыщенную скорость, и цепной контур приходит в движение, сбрасывая груз влево. Для сброса груза вправо, как и прежде, вал 10 отключают от привода. В этом случае груз сбрасывается с вращающегося ролика, что повышает производительИость рольганга.
После сброса груза вновь включают приводы корпуса 1 и вала 10 на прежнюю скорость вращения, корпус и вал начинают вратцаться синхронно, и движение цепных контуров вдоль оси ролика прекращается.
Предлагаемый ролик может применяться в рольгангах, перемещающих груз в двух взаимно перпендикулярных направлениях. Не обязательно все траверсы выполнять с червячной нарезкой, достаточно с нарезкой выполнить три захвата, тогда при выходе из зацепления с червяком одного захвата второй вступает с ним обязательно в зацепление, и связь между цепным контуром и червяком не нарущается.
Предлагаемая конструкция ролика эффективна в работе, так как цепной контур с захватами может сбрасывать с ролика грузы любого типа, в том числе и цилиндрические - бревна, трубы любой ширины.
Формула изобретения
.Источники информации, принятые во внимание при экспертизе
