Изобретение относится к рычажным подъемникам и предназначено для стабилизации рабочего органа подъемника Известна рычажная система управле ния рабочим органом подъемника, содержащая несущий рабочий орган рычаг, установленный на поворотном вокруг вертикальной оси основании, .сна женном механизмом, воспринимающим опрокидывающий момент от рабочего ор гана и соединенным е последним по- -средством пары тяг l J. Однако известное устройство не об ,печивает равномерного распределения нагрузки на обе тяги при нормальной работе, а также возможности работы одной тяги в аварийной ситуации. Цель изобретения -повышение безопасности работы подъемника путем ра номерного распределения нагрузки на обе тяги. Поставленная цель достигается тем что указанный механизм выполнен в виде установленного с возможностью п ворота вокруг горизонтальной оси вала, на концах которого перпендикулярно его оси эксцентрично установлены дополнительные рычаги, шарнирно соединенные с парой упомянутых тяг и .посредством дополнительных тяг с несущим рычагом, а основание снабжено упорами для взаимодействия с дополнительными рычагами при обрыве одной из тяг. .Кроме того, с целью оповещения об аварийной ситуации рычажная система может быть снабжена системой сигнализации с конечным выключателем, смонтированным на основании, и кулдчком, который установлен йа в,алу для взаимодействия с конечным выключателем. На фиг. i показана р.ычажная система управления рабочим органом погрузчика, вид сбоку; на фиг. 2 - разрез А-А на фиг. 1;.на фиг. 3 - рычажная система управления рабочим органом погрузчика, вид сверху. Рычажная система состоит и-з тяг I и 2, которые одними своими концами шарнирно связаны с рабочим органом 3 подъемника, а другими - с дополнитель ными тягами 4 и 5 и дополнительными рычагами 6 и 7. Дополнительные тяги 4 и 5. шарнирно соединены с поворотной вокруг вертикальной оси платформой 8, а дополнительные тяги 4 и 5 установлены эксцентрично на концах вала 9 перпендикулярно его оси. На поворотной платформе 8 установлены упоры 10 и М для взаимодействия с дополнитель ными рычагами 6 и 7 и конечным выключателем 12 систеьы сигнализации. На валу 9 установлен кулачок 13, взаимодействукиций с конечным выключателем в аварийной ситуации. Рабочий орган 3 шарнирно закреплен на несущем рычаге 14, шарнирно рмонтированном на поворотной платформе 8. Устройство работает следующим образом. Опрокидывающий момент от рабочего органа 3 воспринимается тягами 1 и 2 и рычагом 14. При этом нагрузка на тя ги 1 и 2 распределяется посредством вала 9 и дополнительных рычагов 6 и 7 равномерно. В случае поломки одной игз тяг, например тяги 1, эксцентриковый 9 поворачивается до соприкосновес упором, в данном случае упором При этом дополнительный рычаг 7 смещается за счет шарнирного соединения дополнительных тяг 4 и 5 и воспринимает всю нагрузку от опрокидывающего момента рабочего органа 3. При помощи вала 9 кулачок 13 воздействует на конечный выключатель 12 системы сигнализации. Таким образом, рьгчажная система обеспечивает повышение безопасности работы подъемника в случае выхода из строя одной из тяг, а также одновреMKtiim оповещает об аваршпюи (итуЛ1ии путем срабатывания сигнала. Формула изобретения 1.Рычажная система управления рабочим органом подъемника, содержащая несущий рабочий орган рычаг, установленный на noBopOTHcw вокруг вертикальной оси основании, снабженном механизмом, воспринимающим опрокидывающий момент от рабочего органа н соединенным с последним посредством пары тяг, отличающаяся тем, что, с целью повьшения безопасности работы подъемника путем равномерного распределения нагрузки на обе тяги, указанный механизм выполнен в виде установленного с возможностью поворота вокруг горизонтальной оси вала, на концах которого перпендикулярно его оси эксцентрично установлены дополнительные , шарнирно соединенные с парой упомянутых тяг и посредством дополнительных тяг с несущим рычагом, а основание снабжено упорами для взаимодействия с дополнительными рычагами при обрыве одной из тяг. 2.Система по п. 1, отличающаяся тем, что, с целью оповещения об аварийной ситуации, она снабжена системой сигнализации с конечным выключателем, смонтированным на основании, Икулачком, который установлен на валу для взаимодействия с конечным выключателем. Источники информации, принятые во внимание при экспертизе 1. Заявка ФРГ № , кл. В 66 F П/04, 1974 { прототип J.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для аварийной остановки грузонесущего органа подъемника | 1977 |
|
SU650934A1 |
| ПОДЪЕМНИК ГИДРАВЛИЧЕСКИЙ | 2011 |
|
RU2458849C1 |
| Двухъярусная конвейерная линия для изготовления строительных изделий | 1978 |
|
SU992188A1 |
| Подвесной манипулятор | 1972 |
|
SU559819A1 |
| ПОДЪЕМНИК АВТОМОБИЛЬНЫЙ ГИДРАВЛИЧЕСКИЙ | 2001 |
|
RU2199484C2 |
| КРАН-МАНИПУЛЯТОР МЕТАЛЛОВОЗНЫЙ САМОСВАЛЬНОГО ТИПА | 2003 |
|
RU2245804C2 |
| Устройство для аварийной остановки грузонесущего органа подъемника | 1981 |
|
SU1014796A1 |
| Подъемник | 1985 |
|
SU1357335A1 |
| ТРАНСПОРТНОЕ СРЕДСТВО ДЛЯ ПРИЕМА И ТРАНСПОРТИРОВКИ МУСОРА | 1993 |
|
RU2119883C1 |
| СИСТЕМА УПРАВЛЕНИЯ ВЫСОТОЙ ДЛЯ УБОРОЧНОГО РАБОЧЕГО ОРГАНА | 2019 |
|
RU2786639C2 |
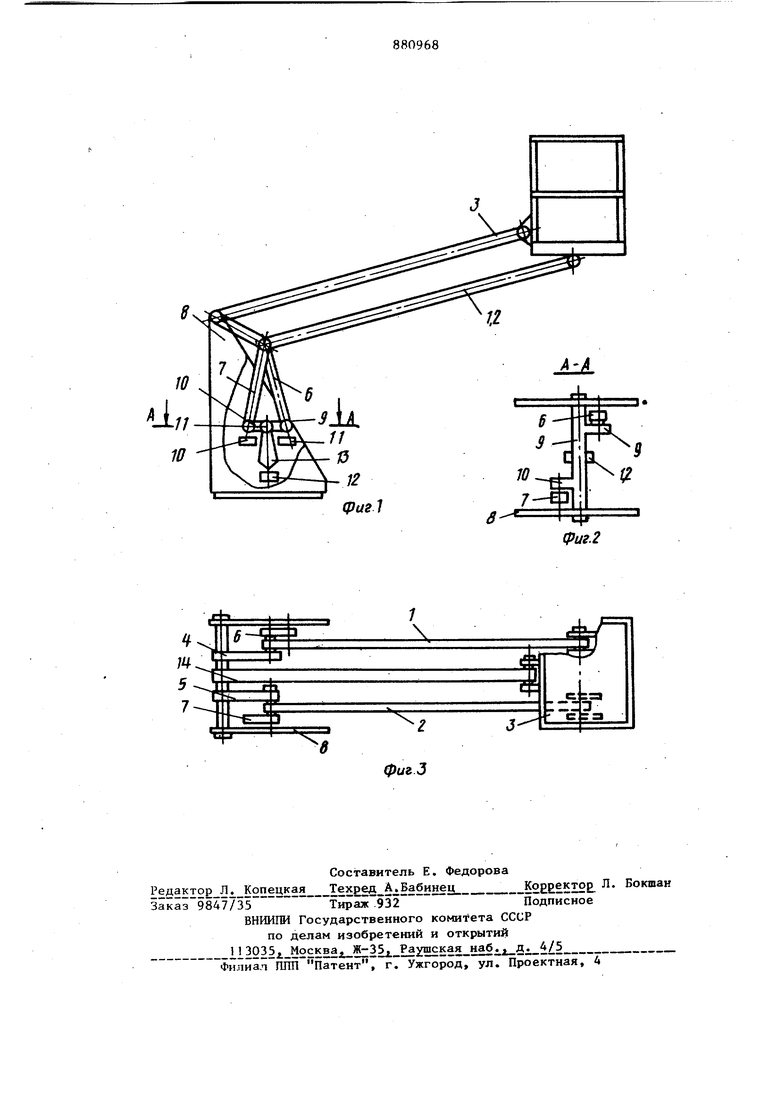
фигЗ
