Изобретение относится к грузоподъемной и транспортной технике и может найти широкое применение для механизации межконвейерной перегрузки грузов, складских и других погрузочно-разгрузочных работ.
Известен манипулятор, содержащий ходовую тележку с установленным на ней механизмом подъема, включающим подвеску, несущую траверсу с грузозахватным органом и привод, выходной вал которого посредством зубчатой передачи соединен с подвеской.
Однако на этих манипуляторах изменение скоростей осуществляется путем подачи специальных команд на изменение передаточного отнощения привода, что усложняет конструкцию манипулятора.
Целью изобретения является изменение скоростей подъема и опускания груза без подачи команда на изменение передаточного отнощения привода, а также упрощение привода и системы управления.
Это достигается тем, что траверса снабжена штангами с регулируемыми упорами, а на ходовой тележке установлены ограничители хода, взаимодействующие с этими упорами, причем на грузозахватном органе щарнирно смонтирован двуплечий орган, одно плечо которого связано с подвеской, а другое посредством щарнирно-рычажного многозвенника - с траверсой.
Шарнирно-рычажный многозвенник состоит из поперечины с кривощипом, связанных с двуплечим рычагом тягой.
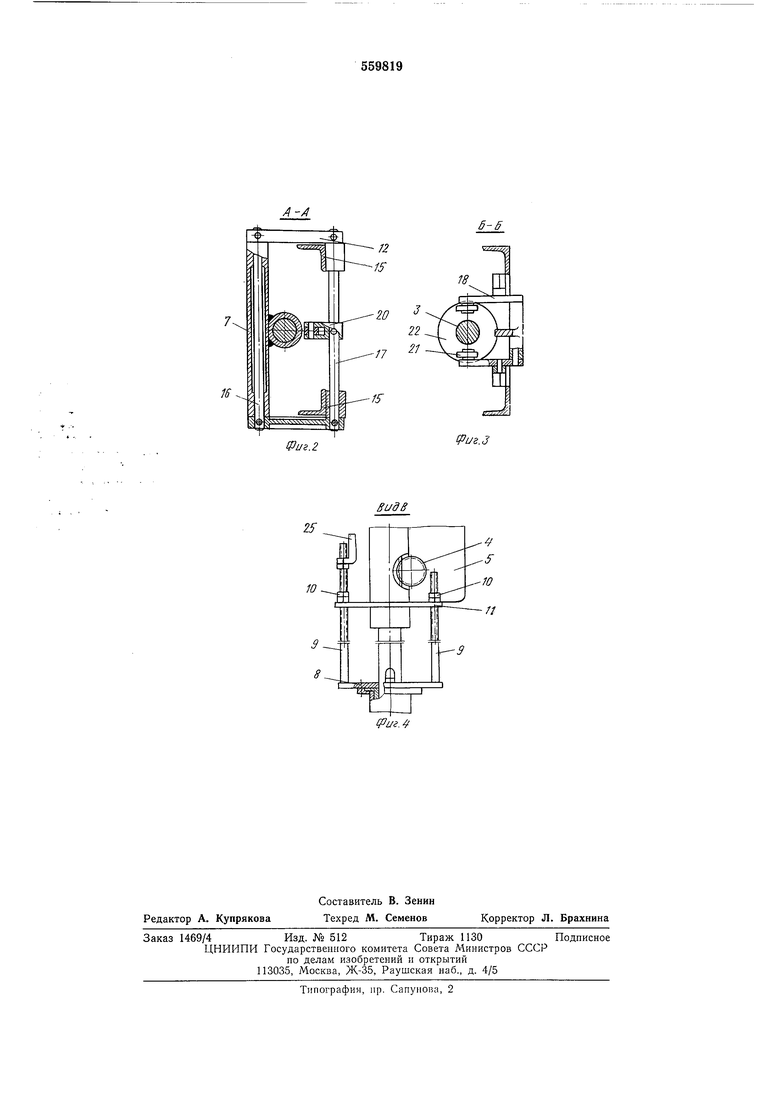
На фиг. 1 изображен предложенный манипулятор, общий вид; на фиг. 2 - разрез по
А-А на фиг. 1; на фиг. 3 - разрез по Б-Б
на фиг. 1; на фиг. 4 - вид по стрелке В на
фиг. 1.
Устройство содержит ходовую тележку, па раме 1 которой закреплен корпус 2 с подвеской 3, выполненной в виде зубчатой рейки, взаимодействующей с щестерней 4, жестко закрепленной на выходном валу привода 5, смонтированного вместе с двигателем 6 на корпусе 2.
На подвеске 3 установлена с возможностью поворота, а также перемещения вдоль оси траверса 7, на которой также с возможностью поворота и осевого перемещения смонтирована планка 8 со щтангами 9 и регулируемыми упорами 10, взаимодействующими при опускании траверсы с ограничителями И хода.
На траверсе 7 при помощи поперечин 12 щарнирно закреплен Г-образный грузозахватный орган 13, снабженный подхватывающими лапками 14 и вертикальным элементом 15.
Ноперечины 12 попарно-л естко соединены с шарнирными осями 16 и 17, образуя жесткие прямоугольные рамки. На элементе 15 щарнирно закреплен рычаг 18, одно плечо которого тягой 19 связано с жестко закрепленным на оси 17 кривошипом 20, а на втором плече подвижно закреплен ролик 21, взаимодействующий с горизонтальным диском 22, жестко закрепленным на подвеске 3.
Пластина 23 при крайнем нижнем положении грузозахватного органа взаимодействует с конечным выключателем 24, установленным на траверсе 7; соответственно для ограничения хода вверх на штанге 9 закреплена планка 25, взаимодействующая с выключателем 26, закрепленным на корпусе 2. Груз 27 подхватывается лапами 14. Органы управления 28 установлены на траверсе 7.
Работа манипулятора осуществляется следующим образом.
Грузозахватный орган 13 находится в нижнем положении. При ходе подвески 3 вверх диск 22, воздействуя через ролик 21 и рычажно-тяговую систему (рычаг 18, тяга 19, кривошин 20 и поперечины 21) на грузозахватный орган 13, ноднимает последний вместе с грузом 27. Однако скорость подъема органа 13 на этом участке меньше скорости перемещения подвески 3 (перемещение / органа 13 меньше соответствующего перегмещения L подвески 3) н зависит от соотношения длин понеречины 12, кривошипа 20, а также плеч рычага 18. При этом траверса 7 остается неподвижной. Ее собственный вес, а также действующие на нее часть веса органа 13 и груза 27 воспринимаются через штангн 9 и регулирЗемые упоры 10 ограничителем хода 11.
При дальнейшем ходе вверх диск 22 упирается в траверсу 7, и с этого момента подвеска 3, траверса 7, орган 13 и груз 27 начинают двигаться как единое целое со скоростью подвески 3, т. е. скорость подъема груза 27 возрастает. При действии планки 25 на конечный выключатель 26 движение прекращается.
Реверсированием двигателя 6 опускают подвеску 3 траверсы 7 и орган 13 со скоростью неремещения нодвески. Это происходит до тех пор, пока упоры 10 не дойдут до выключателей и не остановят траверсу 7.
Дальнейшее перемешенне подвески 3 вниз осуществляется через рычажно-тяговую систему. Скорость опускания уменьшается, и груз 27 устанавливается на подставку.
Формула изобретения
1.Подвесной манипулятор, содержащий ходовую тележку с установленным на ней механизмом нодъема, включающим подвеску,
несущую траверсу, грузозахватный орган и привод, выходной вал которого посредством зубчатой передачи соединен с подвеской, отличающийся тем, что, с целью обеспечения изменения скорости подъема и опускания
груза на различных участках трассы, траверса снабжена штангами с регулируемыми упорами, а на ходовой тележке установлены ограничители хода, взаимодействующие с этими упорами, причем на грузозахватном органе шарнирно смонтирован двуплечий рычаг, одно плечо которого связано с подвеской, а другое посредством шарнирно-рычажного многозвенника - с траверсой.
2.Манипулятор по п. 1, отличающийся тем, что шарнирно-рычажный многозвенник
состоит из поперечины с кривошипом, связанных с двуплечим рычагом тягой.
7Фиг.2
В-б
1риг.З
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для перемещения вагонных тележек | 1989 |
|
SU1794735A1 |
| ПОДВЕСНАЯ ГРУЗОПОДЪЕМНАЯ ТЕЛЕЖКА | 1968 |
|
SU210345A1 |
| Трелевочная каретка подвесной канатной дороги | 1984 |
|
SU1162650A1 |
| Грузозахватное устройство | 1990 |
|
SU1751139A1 |
| ГРУЗОЗАХВАТНОЕ УСТРОЙСТВО ДЛЯ ТРУБ | 1972 |
|
SU334160A1 |
| Шасси транспортного средства дляпЕРЕВОзКи длиННОМЕРНыХ гРузОВ | 1979 |
|
SU839784A1 |
| Грузозахватная система | 1989 |
|
SU1768491A1 |
| КРАН-МАНИПУЛЯТОР МЕТАЛЛОВОЗНЫЙ | 1998 |
|
RU2140367C1 |
| ПОДЪЕМНИК ГИДРАВЛИЧЕСКИЙ | 2011 |
|
RU2458849C1 |
| Захватное устройство для длинномерных грузов | 1981 |
|
SU1071565A1 |