(54| СТРЕЛА ГРУЗОПОД1 ЕМНОГО УСТРОЙСТВА
| название | год | авторы | номер документа |
|---|---|---|---|
| СТРЕЛА ГРУЗОПОДЪЕМНОГО УСТРОЙСТВА | 1991 |
|
RU2029727C1 |
| СТРЕЛА ГРУЗОПОДЪЕМНОГО УСТРОЙСТВА | 1991 |
|
RU2025455C1 |
| Механизм перемещения погрузочно-разгрузочной лопаты фронтально-перекидного погрузчика | 1989 |
|
SU1735207A1 |
| Стрела грузоподъемного устройства | 1990 |
|
SU1801935A1 |
| ПАРАЛЛЕЛОГРАММНЫЙ ПРЯМОЛИНЕЙНО-НАПРАВЛЯЮЩИЙ МЕХАНИЗМ | 2021 |
|
RU2769002C1 |
| Фронтальный погрузчик с расширенной рабочей зоной | 2022 |
|
RU2783604C1 |
| ПЕРЕДВИЖНОЕ ГРУЗОПОДЪЕМНОЕ УСТРОЙСТВО | 1997 |
|
RU2137700C1 |
| Грузоподъемное устройство | 1984 |
|
SU1230985A1 |
| СКЛАДЫВАЮЩИЙСЯ ГРУЗОПОДЪЕМНЫЙ МАНИПУЛЯТОР ПАРАЛЛЕЛЬНОЙ СТРУКТУРЫ | 2021 |
|
RU2780824C1 |
| ГРУЗОПОДЪЕМНЫЙ МАНИПУЛЯТОР | 2019 |
|
RU2728851C1 |
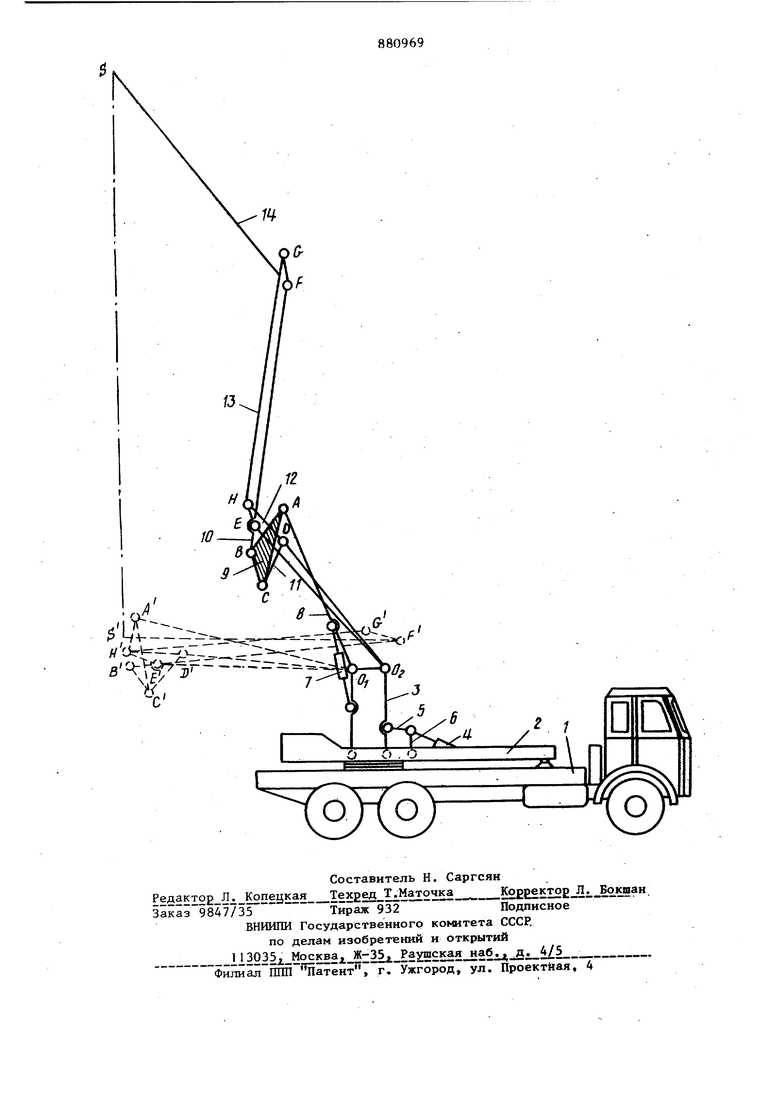
Изобретение относится к транспортному машиностроению и может быть использовано непосредственно в подьемны устройствах для применения их в разг личных областях народного хозяйства. Известна стрела грузоподъемного устройства, содержащая шариирно сочле ненные звенья, одно из которых - ведущее и связано с гидроцилиндром пово рота стрелы в вертикальной плоскости l . Однако высота подъема груза у данной конструкции стрелы зависит от чис ла шарнирных параллелограммов, кинематически взаимосвязанных между собой Но увеличение количества параллелограммов отрицательно влияет на грузоподъемность машины, увеличивая ее собственную массу и транспортные габариты. Одновременно с увеличением числа шарнирных параллелограммов увеличивается и количество шарниров, что отрицательно влияет на надежность машины в целом, на долговечность ее эле ментов. Наконец, увеличению высоты подъема груза в известных конструкциях сопуствует и увеличение числа исполнительных механизмов (гидроцилиндров), что приводит к потере рабочего времени, усложняет управление машиной снижает производительность. Цель изобретения - упрощение конст рукции. Поставленная цель достигается тем, что звенья соединены в две связанные между собой группы, соответственно Ассура II класса и Ассура 1У класса, при этом два звена последней выполнены соответственно в виде трехсторонне го и четырехстороннего жестких контуров, первый из которых соединен с ведущим звеном, а одно из звеньев группы Ассура II класса выполнено из двух жестко соединенных между собой частей разной длины, которые параллельны соответствующим сторонам четырехстороннего жесткого контура. 38 На чертеже показана стрела грузоподъемного устройства в рабочем положении. На опорной раме I монтажного гидроподъемника консольно установлена поворотная 2, обеспечивающая поворот стрелы на 360 в горизонтальной плоскости. На поворотной колонке шарнирно крепится параллелограммный механизм 3, управляемый гидрч-ци.;1инд- ром 4, корпус которого шарнирно закреплен на консольном участке поворотной колонки 2, а шток взаимосвязан с параллелограммным механизмом посредством рычагов 5 и 6. Стрела грузоподъемного устройства смонтирована шарнирно на параллелограммном механиз ме 3 и взаимосвязана с ним гидроци- линдром 7, корпус которого закреплен на параллелограммном механизме 3, а шток - на ведущем звене 8 стрелы. Ведущее звено 8 стрелы соединено посредством шарнира А со звеном 9, пред ставляющим собой трехсторонний жестки контур ABC, который совместно со звеном 12, представляющим собой четырехсторонний жесткий контур 02DH Е 02 и звеньями 10 и 11, соединяюш;ими эти контуры соответственно в шарнирных точках В, Е и C,D , образуют замкнут четырехзвенную изменяемую кинематиче кую .цепь, выполненную в виде группы Ассура 1У класса. К звеньям 10 и 12 замкнутой кинематической цепи в точках F и Н соответственно закреплены шарнирнозвенья 13 и 14, взаимосвязанные друг с другом шарниром G , представляющим собой элемент воспроизведения прямолинейной траектории, и выполненные в виде группы Ассура 1 класса, причем звено 14 выполнено из двух жестко соединенных метрду собой частей различной длины 5F и fQ , которые параллельны, соответственно сто ронам Е02 и ЕН четырехстороннего жес кого контура замкнутой кинематическо цепи. На конце звена 14 установлена площадка 9 Стрела грузоподъемного устройства работает следуюпу1м образом. При повороте ведущего звена 8 стр лы гидроцилиндром 7 на угол oi- от исходного положения четырехсторонний жесткий контур, совершающий ocieOaтельное движение вокруг- точки О , ггеремещается в положение, изображенное на чертеже пунктиром. При этом большая часть SF звена 14 и большая сторона ЕО2 четырехстороннего контура, двигаясь параллельно друг с другом, перемещают рабочую площадку 9 по прямолинейной траектории. Прямолинейность траектории грузовой площадки 5 обеспечивается выполнением стрелы в виде механизма Ассура 1У класса, который дает, кроме того, условие для варьирования большого количества задаваемых параметров для широкого выбора технических характеристик (грузоподъемность, высота подъема груза, скорость подъема, рабочие и транспортные габариты и т.д.). Все это обуславливает широкие технические возможности стрелы грузоподъемного устройства. Кроме того, такое исполнение стрелы с возможностью управления одним гидроиилиндром упоощает ее конструкцию. Формула изобретения Стрела грузоподъемного устройства, содержащая шарнирно сочлененные звенья, одно из которых - ведущее и связано с гидроцилиндром поворота стрелы в вертикальной плоскости, отличающаяся тем, что, с целью упрощения конструкции, звенья соединены в две связанные между собой группы, соответственно Ассура II класса и Ассура 1У класса, при этом два звена последней выполнены соответственно в виде трехстороннего и четырехстороннего жестких контуров, первый из которых соединен с ведущим звеном, а одно из звеньев группьЕ Ассура Г1 класса выполнено из двух жестко соединенных между собой частей разной длины, которые параллельны соответствующим сторонам четырехстороннего жесткого контура. Источники информации, принятые во внимание при экспертизе 1 . Патент Англии № 14.31988, кл. В 8 А, 1976, (прототип ).
