(54) ВЕСЫ КВАДРАНТНЫЕ
| название | год | авторы | номер документа |
|---|---|---|---|
| Весы для взвешивания на судах | 1979 |
|
SU803634A1 |
| Весы квадратные | 1976 |
|
SU541091A1 |
| ВЕСЫ | 1996 |
|
RU2108552C1 |
| Судовое весовое устройство | 1982 |
|
SU1064149A1 |
| Весоизмерительное устройство | 1979 |
|
SU885816A1 |
| Рычажные весы | 1979 |
|
SU832347A1 |
| УСТРОЙСТВО для ВЗВЕШИВАНИЯ НА ДВУХПЛАТФОРМЕННЫХ ВЕСАХ | 1971 |
|
SU310124A1 |
| ВЗВЕШИВАЮЩЕЕ УСТРОЙСТВО НА ТРАНСПОРТНОМ СРЕДСТВЕ | 1993 |
|
RU2091723C1 |
| Весовое устройство со ступенчатым изменением диапазонов измерения | 1986 |
|
SU1448213A1 |
| Весы рычажные | 1976 |
|
SU570783A1 |
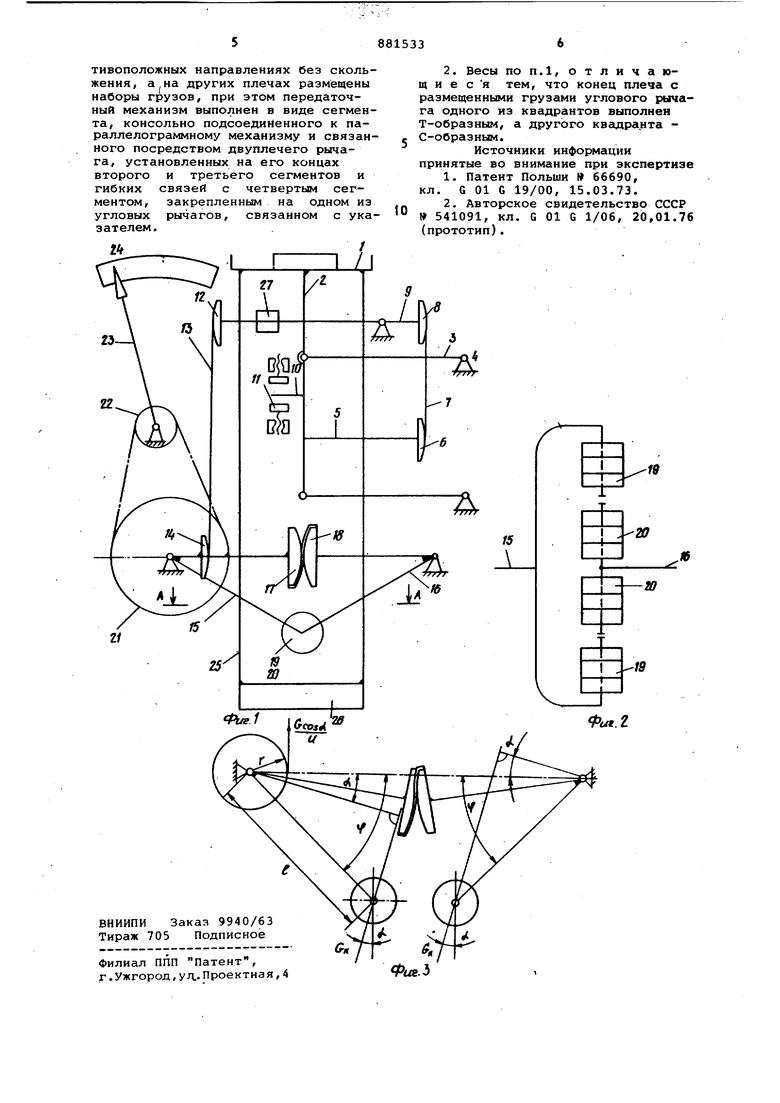
Изобретение относится к весоизмерительной технике, а точнее к весги с несколькими маятниками, и. может бы использовано в весах, применяемых для взвешивания массы в условиях 4Оря. Известны весы, используемые при взвешивании на судах и содержащие грузоприемную платформу, уравновешивающие грузы, перемещаемые по рыча ГУС1 . Недостатком весов является больша трудоемкость ручных операций взвешивания, связанных с подбором уравнове шивающих грузов. Наиболее близкими по технической сущности к предлагаемому являются ве сы квсшрантные, содержащие грузовую платформу, установленную на параллелограммном механизме, и расположенный с ней на одной вертикальной оси квадрантный механим, а также передаточный механизм и указатель 2. Весы не исключают полностью возникновения погрешностей при морской качке, так как грузы квадрантов весов расположены на разных высотах. Цель изобретения - повышение точности взвешивания в условиях качки. Эта цель достигается тем, что квадранты весов выполнены в виде двуплечих угловых рычагов с осями вращения, расположенными в горизонтальной плоскости, причем одни плечи угловых рычагов квадрантов соединены между собой кинематически с возможностью вращения в противоположных направлениях без скольжения, а на других плечах размещены наборы грузов; при этом передаточный механизм выполнен в виде сегмента, консольно подсоединенного к параллелогрг1ммному механизму и связанного посредством двуплечего рычага, установленных на его концах второго и третьего сегментов и гибких связей с четвертым сегментом, закрепленным на одном из угловых рычагов, связанном с указателем, а также тем, что конец плеча с размещенными грузами углового рычага одного из квадрантов выполнено Т-образным, а другого квадранта - С-образным. На фиг. 1 показана кинематическая схема весов; на фиг.2 - наборы грузов квадрантов, вид сверху, на фиг.З схема работы при наклонах весов. Грузовая платформа 1, закреплена на вертикальном стержне 2 параллелограммного механизма, горизонтальные стержни 3 которого вращаются на неподвижных шарнирах станины 4. Между шарнирами вертикального стержня 2. жестко прикреплена консоль 5, причем свободный конец консоли 5 несет сегмент 6, связанный гибкой связью например, стальной лентой) 7 с сегменг том 8, закрепленным на коротком плече рычага 9. На вертикальном стзржне 2 имеется также ограничитель 10, расположенный между двумя регулируемыми упорами 11. На большом плаче рычага 9 также установлен сегмент 12, связанный гибкой нитью 13 с сегментом 14, установленным на угловом рычаге 15 левого квадранта. Угловой рычаг 15 левого квадранта и угловой рычаг 16 правого квадранта установлены на неподвижных шарнирах, оси ко торых расположены в горизонтальной плоскости и соединены между собой по редством кинематической связи, допус кающей передачу вращения в противоположн ых направлениях без скольжения, например, посредством сегментов 17 и 18 и гибкой нерастяжимой нити. Сегменты 17 и 18 установлены на одних плечах угловых рычагов, а кон цы других плеч угловых рычагов 15 и 16, предназначенные для установки наборов грузов 19 и 20, имеют различное конструктивное исполнение (фиг. 2). На Т-образном плече рычага 1 б и С-образном плече рычага 15 поПсрно установлено по два одинаковых набора грузов 19 и 20 таким образом, чтобы рабочие участки траекторий движения центров масс наборов грузов обоих квадрантов пересекались в одной точке, лежащей на верт кальной оси грузовой платформы 1 . На оси квадрантного рычага 15 непод вижно укреплен шкив 21, связанный гибкой нитью со шкивом 22, на котором закреплена стрелка 23. На стани не весов неподвижно закреплена шкала 24, к грузовой платформе 1 на ве тикальных жестких подвесках 25 непо вижно подвешен груз 26, расположенный под наборами грузов 19 и 20 Квадрантов. Передвижной груз 27, предназначен для точного уравновешивания тары. Перед взвешиванием на грузовой платформе отсутствует груз, стрелка 23 находится в крайнем правом положении. Ограничитель 10 соприкасается с верхним упором 1 рычаг 9 повернут против часовой стр ки по отношению к горизонтали, груз 19 и 20 квадрантов занимают крайнее нижнее положение. Для взвешивания груз накладывается на платформу 1 . Под действием силы тяжести взвеш ваемого груза платформа 1 опускается вниз вместе со стержнем 2, грузо 26 и консолью 5, которая через сегмент 6, нить 7, сегмент 8 поворачивает по часовой стрелке рычаг 9 и через сегменты 12 и 14 и нить 13 поворачивает кинематически связанные квадранты так, что грузы их поднимаются вверх до тех пор, пока создаваемый ими момент не уравновесит силу тяжести взвешенного груза. Ограничитель 10 при этом отходит от верхнего упора, а стрелка 23 показывает массу груза на платформе 1. Если масса груза на платформе 1 превысит верхний предел измерения, то ограничитель 10 ложится на нижний упор 11,а стрелка занимает на шкале крайнее левое положение. Для расширения пределов взвешивания используются различные наборы сменных грузов 19 и 20. При взвешивании грузов на судне в условиях качки причиной нарушения равновесия весов может быть различная величина ускорений качки взвешиваемого груза и уравновешивающих масс.. Для уменьшения ошибки взвешивания, связанной с различной величиной этих ускорений, грузовая платформа 1 расположена на одной вертикальной оси с общим центром масс грузов 19 и 20 квадрантов, а центр масс платформы 1 искусственно с помощью добавочного груза 26 понижен для максимального приближения его к общему центру масс грузов 19 и 20 квадрантов. Устройство позволяет добиться практически одинаковых ускорений качки взвешиваемых и уравновешивающих масс и свести к минимуму ошибку, вызываемую этими ускорениями, кроме того, в результате симметрии устройства и кинематической связи между квадрантами изменение момента одного квадранта при наклонах весов сопровождается равным по величине и противоположным по знаку изменением момента другого квадранта, чем обеспечивается сохранение равновесия системы.Использование весов позволит снизить процент перерасхода сырья в среднем до 1%. Формула изобретения 1. Весы квадрантные, содержащие грузовую платформу, установленную на параллелограммном механизме, и рас- положенный с ней на одной вертикальной оси квадрантный механизм, а также передаточный, механизм и указатель, отличающийся тем, что, с целью повышения точности взвешивания в условиях качки, квадранты выполнены в виде двуплечих угловых рычагов с осями вращения, расположенными в горизонтальной плоскости, причем одни плечи угловых рычагов квадрантов соединены между собой кинемати- . чески с возможностью вращения в про
