Изобретение относится к весоизмерительной технике, в частности к устройствам для взвешивания, например, рыбопродуктов в условиях морской качки. Известны тензометрические платформенные весы, содержащие весовую платформу, . опирающуюся на тензодатчики, автокомпенсатор и корректор ошибок, выполненный в виде дополнительной платформы, идентичной весовой, нагруженной эталонной массой и опирающейся на тензодатчики 1. Известное устройство позволяет производить взвешивание в условиях неспокойного моря, однако илеет слож ную электронную схему. Наиболее близким к предлагаемому является весоизмерительное устройство, содержащее грузоприемную платформу, соединенную с квадрантами эле ментами связи, и станину 2. Недостаток известного устройства состоит в том, что оси квадрантов Ус тановлены в подшипниках качения, которые снижают пороговую чувствительность механизма и препятствуют повышению точности. Существенным недоста тком такой конструкции также являетс различная величина погрешностей иэме рения при качке в двух взаимно перпендикулярных плоскостях. Наличие этого недостатка требует либо ограничения ориентации весов на палубе судна, что создает известные неудобства при расстановке оборудования, либо загрубления класса точности весоизмерительного прибора относительно наихудшего направления качки. Цель изобретения - повышение точности измерения в условиях морской качки. Поставленная цель достигается тем, что квадранты расположены в горизонтальной плоскости под углом 120 друг к другу, и каждый из них выполнен в внце симметричного тела вращения, образованного из двух малых и одного большого цилиндров, и двух конусных частей, жестко закрепленных на части поверхности цилиндров, причем конусные части .смежных квадрантов соединены элементами связи между собой, а свободные поверхности малых цилиндров и больших цилиндров - соответственно со, станиной и грузоприемной платформой. Один вариант исполнения йредусялатривает выполнение элементов связи в видегибких лент, а другой - в виде
зубчатых передач, причем в первом случае конусные части двух смежных квадрантов соединены между собой перекрещивающимися гибкими лентами.
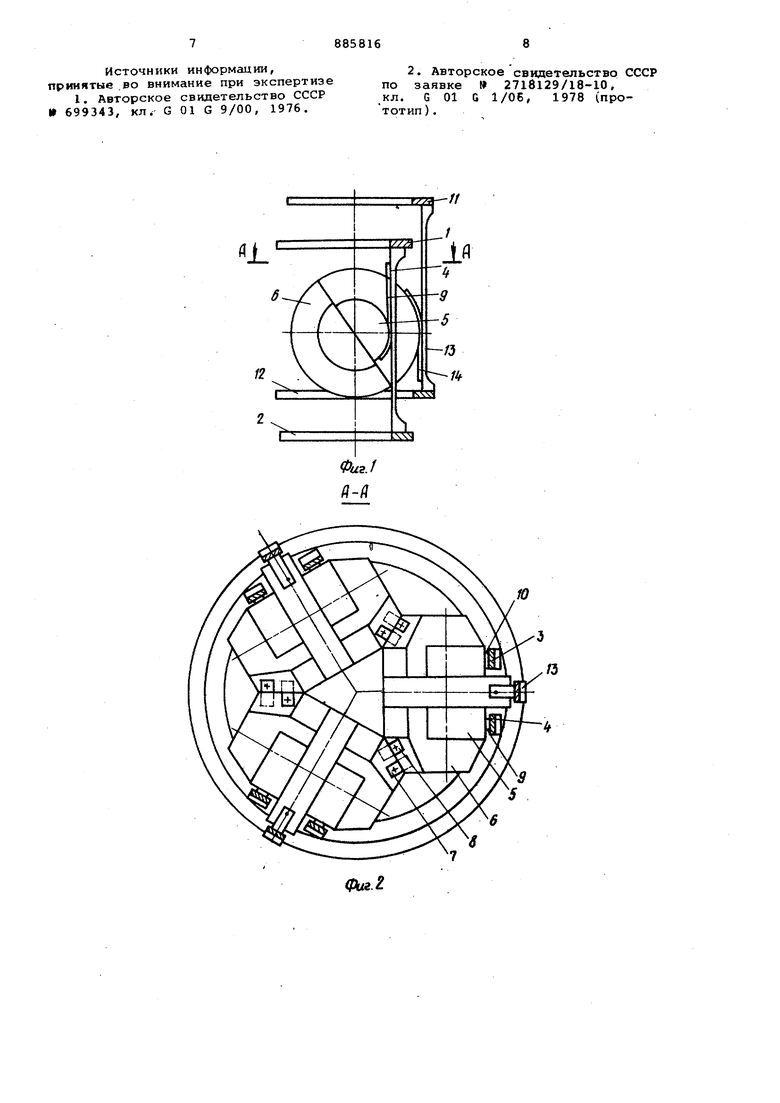
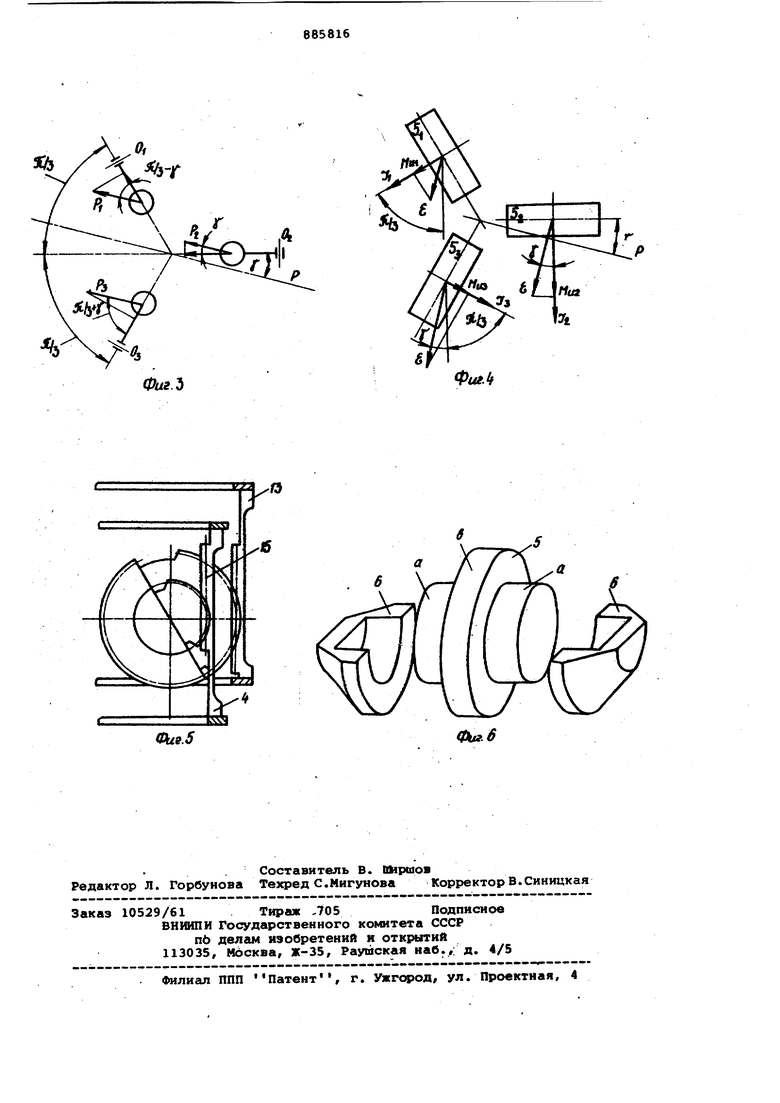
На фиг, 1 изображено, устройство, общий вид, продольный разрез; на фиг. 2 - разрез А-А на фиг. 1; на фиг, 3 - горизонтальная проекция расположения квадрантов весов; на фиг. 4 - расчетная схема влияния моментов инерции масс квадрантов на положение равновесия устройства , на фиг. 5 - схема соединения контактирующих поверхностей устройства посредством зубчатых зацеплений;на фиг. 6 - квадрант в разобранном виде аксонометрическая проекция.
Устройство содержит верхнее и нижнее кольца 1 и 2, соединенные между собой стойками 3 и 4, которые попарно расположены на окружности со сдвигом 120° и образуют станину. Квадранты 5 расположены в горизонтальной .плоскости под углом 120 и выполнены в виде симметрично-ступенчатого тела вращения (фиг. б) с жестко прикрепленными на краях малых цилиндров а частями конусов 6, образующие которых наклонены под углом 30 к оси цилиндров и контактируют между собой через перекрепдивающиеся гибкие ленты 7 и 8, концы которых закреплены на смежно противоположных частях конусов 6. К свободным поверхностям Мс1лых цилиндров а ступенчатого тела вращения снизу закреплены концы гибких лент 9 и 10, а другие их концы соответственно закреплены на стойках 3 и 4 стГ.НИНЫ. Кольца 11 и 12, соединенные вертикальными стойкс1ми 1 расположенными со сдвигом по окружности на 120°, образуют грузоприемну платформу. Нижние части стоек 13 соединены гибкими лентами 14 с наружными поверхностями больших цилиндров 6 ступенчатого тела вращения.
Квадранты 5 могут быть соединены между собой и со стойками также посредством зубчатых зацеплений. При этом на контактирующих частях конусов выполнено зубчатое зацепление, а поверхности цилиндров имеют зубчатые профили, находящиеся в зацеплении с зубчатыми рейками 15, установленными на стойках 4 и 13 (фиг. 5).
Устройство работает следуюп;им образом.
При отсутствии груза, воздействующего на верхнее кольцо 11, квадранты 5 находятся в крайнем нижнем положении и повернуты против часовой стрелки до упора частей конусов б в стойки 4 и 3. В этом положении сумма моментов, создаваемых квадрантами 5, уравновешивается моментом, создаваемым весом грузоприемной платформы.
При воздействии навешиваемого груза на кольцо 11 его вес передается через стойки 13 и ленты 14 на квадранты 5 и поворачивает их по часовой стрелке с одновременным подъемом вверх. При этом центры масс частей конусов б удаляются от центров поворота квадрантов 5, и уравновешивающий момеят возрастает до тех пор, пока не сравняется с моментом, создаваемым взваливаемым грузом.
Основными причинами, способными нарушить установившееся равновесие устройства при качке основания, (палубы судна), являются статический наклон, разность ускорений измеряемой и уравновешивающей массы и моменты сил инерции, воздействующие на квадранты.
Благодаря тому, чТо устройство представляет собой симметричную конструкцию относительно вертикальной оси, все причины, способные вывести устройство из равновесия, действуют на устройство одинаково при качке основания в любой плоскости. Это отличие предлагаемого устройства йвляется существенным преимуществом перед всеми известными механическими устройствами для измерения массы,которые имеют всегда резко отличные характеристики точности при качке в разных плоскостях.
При статических наклонах суммарный уравновешивающий момент, создаваемый квадрантами, не зависит от угла наклона весов в любом направлении. Для доказательства зтого примем к сведению, что при наклоне весов .сила веса квадрантов и грузоприемного устройства с грузом раскладывается на вертикальную и горизонтальную составляющие. При этом вертикальные составляющие всех грузов, влияющих на равновесие систеь, с ростом угла наклона весов уменьшаются в одинаковом отношении, поэтому равновесие систеки не зависит от величины этих составляющих.Вертикальные составляющи веса квадрантов всегда создают суммирующиеся моменты одного знака, а их величина уменыиается росте угла наклона весов в том же отношении, что и величина вертикальной составляющей груза. Поэтому равновесие системы не зависит от величины изменяющихся вертикальных составляющих. Следовательно, для доказательства нечувствительности устройства к наклонам достаточно доказать, что горизонтальные составляющие, которое создают на противоположных квадрантах моменты разного знака, также не влияют на равновесие системы.
На горизонтальной проекции расположения квадрантов весов (.3} горизонтальные составляющие р сил веса изображаются без искажений, О,, О, и 0 - оси вращения квадрантов; р - горизонтальный след вертикальной плоскости, в которой наклонены весы; 1Г - угол между плоскостью наклона измерительного устройства-и плоскостью вращения одного из квадрантод После изменения f в интервале о- условия равновесия периодически пов торяются. Так как квадранты соединен между собой лентами/ не допускающими их относительного проворачивания,то показанном положении силы Р и Pj создают момент одного знака, а сил . - другого знака. Условием незави симости положения равновесия от нак лона весов является равенство н лю cyNnvbi моментов сил Р, РП и PI (горизонтальная составляющая груза и грузоприемного узла не рассматривается, так как воспринимается направляющими стоек 3, 4 и 13 и на рав новесие не влияет). С учетом сказанного имеем услови независимости равновесия (у- fj + PjB COS +y)P5ecOST , где Р Р rj Prj - горизонтальные составляющие сил веса одинаковых квадрантов. F - действующая величина плеча квадрантов. Тригонометрические преобразовани показывают, что это выражение является тождеством, откуда следует, чт положение равновесия не зависит ни величины горизонтальных составляющи (от угла наклона при качке), ни от величины угла -j-, определяющего направление плоскости наклонов. Разность взаимного положения цен ров измеряемой и уравновешивающих масс в предлагаемом устройстве може быть доведена до весьма малой величины, практически не влияющей на погрешность измерения, путем размещения в нижней части грузоприемного устройства, например йа ко1льце. 12, балластного груза (не показан). Влияние действующих на квадранты моментов сил инерции не сказывается по той причине, что при любом положении плоскости качки весов сумма моментов сил инерции для противолежащих квадрантов всегда одинакова (по анёшогии с любой симметричной трехфазной системой). Квгшранга 5, 5 rj и Sj (фиг. 4) 1 vrлoм .ЗЗ- а. вектос 31 )- векторы под углом - умоментов инерции массы; Е - вектор углового ускорения качки; f - угол между плоскостью качки р и плоскост перпендикулярной оси второго квадранта. Моменты сил инерции квадрантов о носительно осей ступенчатого тела врёицения определяются по формуле Ми зесов, где Lf - угол между векторами, для квадранта 5 4,- Г для квадрантой 5 и 5 соответ ственно. Условием независимости положения авновесия неподвижной системы мехаизма от воздействия инерционных моментов является доказательство ождества. + Ми1 Из фиг. 4 имеем 0 0057 Jt сое ((r) Тригонометрические преобразования показывают, что выражение Является тождеством. Разность ускорений измеряемой и уравноветцивающей масс сводится к ми-, нимуму, практически не влияющеку на погретдность известными конструктиннимы приемами, позволяющими максимально сблизить центЕЫ обеих масс. Устройство может быть выполнено . также с применением вместо-гибких лент 9 и 14 зубчато-реечных зацеплений 15 и вместо лент 7 и 8 конического зубчатого зацепления. При этом предлагается несущественное, изменение погрешности при сохранении всех описанных ранее свойств. Лучший из вариантов может быть определен технико-зкономическим сравнением с учетом условий эксплуатации и требований завода-изготовителя. Формула изобретения Y- Весоизмерительное устройство, содержащее грузоприемную платформу, соединенную с квадрантами элементами связи, и станину, отличающееся тем, что, с целью повышения точности измерения в условиях морской качки, квадранты расположены в горизонтсшьной плоскости под углом 120 друг к другу, и каждый из них выполнен в виде симметричного тела вращения, образованного из двух малых и одного большого цилиндров, и двух конусных частей, жестко закрепленных на части поверхности малых цилиндров, причем конусные части смежных квадрантов соединены элементами связи между собой, а свободные поверхности малых цилиндров и больших цилиндров -г соответственно, со станиной и грузоприемной платформой. 2,Устройство по п. 1, о т л и ч. а ю щ е е с я тем, что элементы связи выполнены-в виде гибких лент, причем конусные части двух смежных квадрантов соединены между собой перекрещивающимися гибкими лентами, к свободным поверхностям малых . цилиндров гибкие ленты закреплены снизу, а к большим цилиндрам - сверху. 3.Устройство по п.1, отличающееся тем, что элементы связи выполнены в виде зубчатых передач.
Источники информации, принятые .во внимание при экспертизе
1. Авторское свидетельство СССР 1 699343, кл. G 01 G 9/00, 1976.
2. Авторское свидетельство СССР по заявке 2718129/18-10, кл. G 01 G 1/ОБ, 1978 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| Весы для взвешивания на судах | 1979 |
|
SU803634A1 |
| Весы квадрантные | 1978 |
|
SU881533A1 |
| Весы квадратные | 1976 |
|
SU541091A1 |
| Весовое устройство | 1990 |
|
SU1779947A1 |
| Устройство для взвешивания груза на судах | 1978 |
|
SU763692A1 |
| Весодозирующее устройство | 1977 |
|
SU691695A1 |
| Весоизмерительное устройство | 1990 |
|
SU1789876A1 |
| Весоизмерительное устройство | 1991 |
|
SU1793256A1 |
| ГИДРОКОМПЕНСАЦИОННЫЕ ВЕСЫ (ВАРИАНТЫ) | 2001 |
|
RU2199092C2 |
| Рычажные весы | 1979 |
|
SU832347A1 |
Фиг.Ъ
Фut.lt
