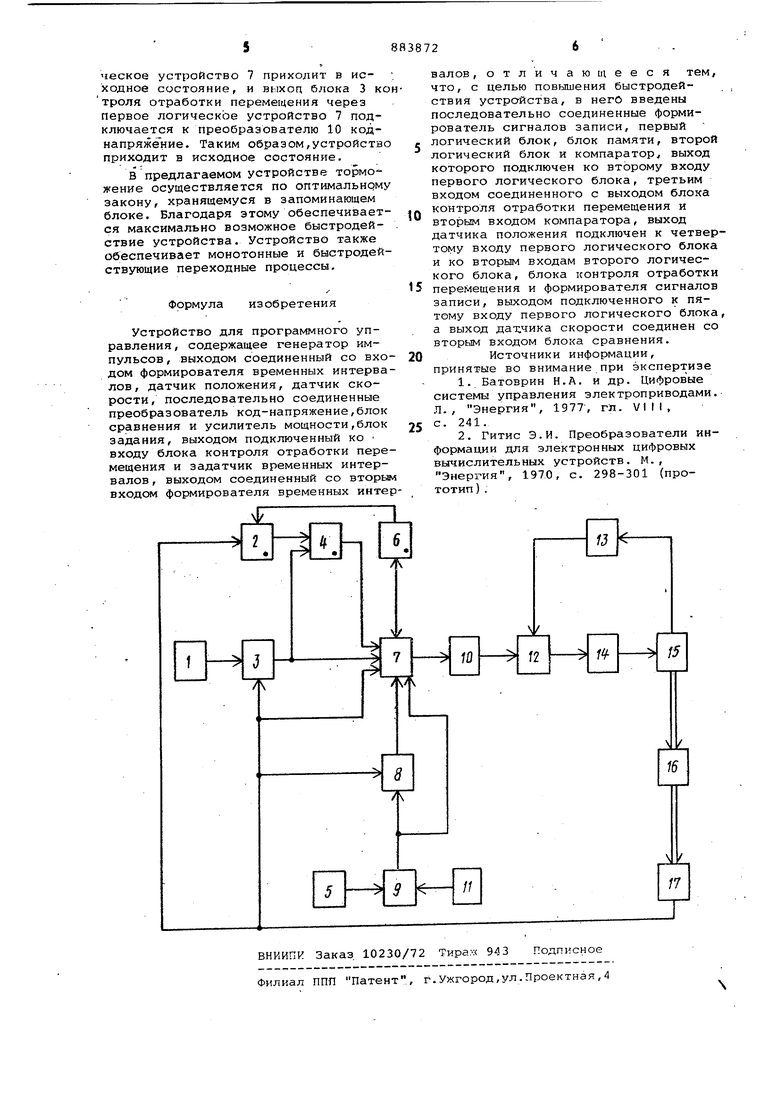
Изобретение относится к системам программного управления и может быт использовано, например, в системах управления электроприводами, робото манипуляторов, а также в системах автоматического управления, применяемых в самых различных областях промышленности. Известна цифровая система управления, содержащая последовательно соединенные заданицее устройство,сра нивающее устройство (цифровой сумматор)-, регистр управления, преобразователь код-напряжение, корректи рующее устройство, усилительно-преобразовательное устройство, исполнительный двигатель j механически связанный через редуктор с кодовьм датчиком, выход которого подключен ко входу сравнивающего устройства, блок синхронизации СП Наиболее близким к предлагаемому изобретению по технической сущности является устройство для программного управления, содержащее последователь но соединенные задающий блок, блок контроля отработки перемещения (сумматор) , преобразователь код-напряжение, блок сравнения, усилитель мощности, исполнительный двигатель,механически связанный через редуктор с датчиками положения и скорости, выходы которых подключены ко второму входу блока контроля отработки перемещения и ко второму входу блока сравнения f 2. Недостатке известных устройств является низкое быстродействие и возможность перерегулирования. Это объясняется тем, что к исполнительнсяиу двигателю прикладывается напряжение, зависящее от величины рассогласования. Цель изобретения - повышение быстродействия. Поставленная цель достигается тем, что в Устройство для программного управления, содержащее генератор импульсов, выходом соединенный со входом формирователя временных интервалов, датчик положения, датчик скорости, последовательно соединенные йреобразователь код-напряжение, блок сравнения и усилитель мощности, блок задания, выходом подключенный ко входу блока контроля отработки перемещения и задатчик временных интервалов, выходом соединенный со вторым входсяи формирователя временных интервалов, введеныпоследовательно соединенные формирователь сигналов записи, первый логический блок, блок памяти, второй логический блок и компаратор, выход которого подключен ко второму входу первого логического блока, третьим входом соединенный с выходом блока контроля отраоохкй перемещения и вто рым входом компаратора, выход датчика положения подключен к четвертому входу первого логического блока и ко вторым входам второго логического бло ка,блока контроля отработки перемещени и формирователя сигналов записи,выходом подключенного к пятому входу первого логического блока, а выход датчика скорости соединен со вторым входом блока сравнения. На чертеже представлена блок-схем устройства. Устройство содержит блок 1 задани второй логический блок 2,блок 3 контроля отработки перемещения, компара тор 4, задатчик 5 временных интервалов , блок б памяти, первый логический блок 7,- формирователь 8 сигналов записи, формирователь 9 временных ин тервалов, преобразователь 10 коД-нацряжение, генератор 11 импульсов,, блок 12 сравнения, датчик 13 скорост усилитель 14 мощности, исполнительны двигатель 15, нагрузка 16, датчик 17 положения. Блок 1 задания задает величину и направление требуемого перемещения нагрузки в виде двоичного кода.Первый и второй логические блоки 7 и 2 устройства выполняют логические функ ции. Блок 3 контроля отработки перемещения сравнивает величину требуемого перемещения с величиной действительного положения нагрузки 16i поступающей с выхода датчика 17 поло жения, и вьщает на выход, величину ра ности. Компаратор 4 сравнивает код на выходе блока 3 контро 1я отработки перемещения либо с кодом на выходе блока 6, либо с кодом на выходе датчика 17 положения. Задатчик 5 передает величину выбранного оператором временного интервала в формирователь 9 временного интервала, в котором происходит подсчет импульсов, поступающих с генератора 11 импульсов, и формируются сигналы в конце каждого временного интервала. В блоке 6 памяти хранится закон оптимального изменения скорости при торможении. Формирователь 8 сигналов записи сравнивает приращения координат за.текущий интервал времени с предыдущим. Блок 12 сравнивает жела емое значение скорости с действительным и выдает значение их разност на усилитель 14 мощности. Блок 12 со местно с усилителем 14 мощности, ис полнительным органом 15, датчиком 1 скорости, нагрузкой 16, датчиком 17 положения и блоком 3 контроля отработки перемещения образуют контуры регулирования по скорости и по положению. Устройство работает следующим образом. Сигнал из блока 1 поступает на блок 3 и через блок 7,преобразователь 10 код-напряжение и блок 12 сравнения поступает на усилитель 14 мощности. Устройство начинает разгон.В формирователь 8 сигналов записи поступают сигналы от блока 9 и информация о перемещении исполнительного органа. В блоке 8 происходит сравнение приращений координат за текущий интервал времени с предыдущим; если эта величина приращения превышает допустимое отклонение по скорости, то на выходе формирователя 8 формируется сигнал записи; при равенстве приращений происходит обобщение движения в двух, трех и т.д. интервалах времени. Обобщение происходит до тех пор, пока неравенство приращений не составит величины, превышающей допустимое отклонение от скорости, после чего формируется сигнал записи. По этому сигналу происходит запись в блок 6 памяти информации о перемещении, поступающей с датчика 17 по.ложения, и информации о величине временного интервала, за который произведено это перемещение, поступающей с формирователя 9. Запись прекращается с переходом устройства на режим движения с постоянной скоростью, т.е. .в момент окончания разгона. На вь1ходе первого логического блока 7устанавливается последний записанный в блоке 6 код. При равенстве оставшегося пути перемещения значению пути разгона код на выходе блока 3 контроля отработки перемещения становится равным последнему, записанному в блоке 6 коду, и на выходе коммутатора 4 появляется сигнал, -по которому из-блока 6 происходит дискретная выборка значений скорости, соответствующих оптимальному з.акону торможения (в обратном порядке по сравнению с режимом разгона).При перемещениях на малые расстояния,т..е в случаях, когда устройство, не выходя на режим движения с постоянной ск.оростью, должно тормозиться,второе логическое устройство 2 отсылает в компаратор 4 не последний записанный в блоке 6 памяти код, а показания датчика 17 положения, где происходит сравнение показаний датчика 17 положения с кодом на выходе блока 3 контроля отработки перемещения. П.ри совпадении кодов начинается торможение аналогично описанному. С окончанием процесса торможения на выходе блока 3 контроля отработки перемещения появляется О, первое логическое устройство 7 приходит в исходное состояние, и выход блока 3 к троля отработки перемещения через первое логическое устройство 7 подключае ся к преобразователю 10 коднапряжение. Таким образом,устройств приходит в исходное состояние. В предлагаемом устройстве торможение осуществляется по оптимальнрму закону, хранящемуся в запоминающем блоке. Благодаря этому обеспечивает ся максимально возможное быстродействие устройства. Устройство также обеспечивает монотонные и быстродействующие переходные процессы. Формула изобретения Устройство для программного управления, содержащее генератор импульсов , выходом соединенный со вхо дом формирователя временных интерва лов, датчик положения, датчик скорости, последовательно соединенные преобразователь код-напряжение,блок сравнения и усилитель мощности,блок задания, выходом подключенный ко входу блока контроля отработки пере мещения и задатчик временных интервалов , выходом соединенный со вторым входом формирователя временных интер валов, отличающееся тем, что, с целью повышения быстродействия устройства, в него введены последовательно соединенные формирователь сигналов записи, первый логический блок, блок памяти, второй логический блок и компаратор, выход которого подключен ко второму входу первого логического блока, третьим входом соединенного с выходом блока контроля отработки перемещения и вторым входом компаратора, выход датчика положения подключен к четвертому входу первого логического блока и ко вторым входам второго логического блока, блока контроля отработки перемещения и формирователя сигналов записи, выходом подключенного к пятому входу первого логического блока, а выход датчика скорости соединен со вторым входом блока сравнения. Источники информации, принятые во внимание при экспертизе 1.Батоврин Н.А. и др. Цифровые системы управления электроприводами. Л., Энергия, 1977, гл. VIII, с. 241. 2.Гитис Э.И. Преобразователи информации для электронных цифровых вычислительных устройств. М., Энергия, 1970, с. 298-301 (прототип ) .
| название | год | авторы | номер документа |
|---|---|---|---|
| Цифровая система управления | 1984 |
|
SU1234811A1 |
| Система программного управления | 1979 |
|
SU817669A1 |
| Многоканальный преобразователь перемещения в код | 1985 |
|
SU1275751A1 |
| Преобразователь перемещения в код | 1983 |
|
SU1111189A1 |
| Цифровая позиционная система | 1981 |
|
SU974341A1 |
| Цифровая система управления | 1986 |
|
SU1357917A1 |
| Многокоординатное устройство для управления | 1989 |
|
SU1777121A2 |
| Устройство для программирования промышленного робота | 1985 |
|
SU1277068A1 |
| СИСТЕМА ПОЗИЦИОНИРОВАНИЯ РАДИОЧАСТОТНЫХ МЕТОК В ЗДАНИИ С ПОВЫШЕННОЙ ИЗБИРАТЕЛЬНОСТЬЮ ДЛЯ УПРАВЛЕНИЯ ЭВАКУАЦИЕЙ В ЧРЕЗВЫЧАЙНЫХ СИТУАЦИЯХ | 2021 |
|
RU2780776C1 |
| Устройство для циклового программного управления | 1981 |
|
SU1003019A1 |
